

Загальна фізика / Теоретичні курси / Конспект лекцій з фізики №1
.2.pdfвигляд
F t = p або F t = p2 − p1 ,
де F t – iмпульс сили.
1.2.4Третiй закон Ньютона
Змiст третього закону є в тому, що дiя дорiвнює протидiї. Цей закон визначає взаємодiю мiж тiлами.
→ →
Сили Fjk та Fkj , з якими матерiальнi точки (тiла) дiють одне на одне, завжди мають однаковi модулi, протилежно направленi i дiють вздовж прямої, що з’єднує цi тiла. Сили не можуть врiвноважувати одна одну, бо прикладенi до рiзних тiл
→ |
→ |
→ → |
(27) |
| Fjk | = | Fkj | |
Fjk 6= Fkj . |
||
(26)
Рис. № 6: 1.X
Третiй закон Ньютона є справедливим лише для замкнених систем тiл, тобто таких систем, на якi не дiють нiякi зовнiшнi тiла (або сили).
1.2.5Сили в класичнiй механiцi
1.Сила тертя (ковзання) представлена на рис. 7 i визначається за формулою:
→ |
→ |
|
(28) |
Fтр = µ N |
, |
||
де ~ i вiдповiдно сила реакцiї опори i коефiцiєнт тертя.
N µ
→
2. Сила всесвiтнього тяжiння FG та
→
тотожна їй сила тяжiння p = m~g (сила, з якою тiло тисне на поверхню, або розтягує нить):
→ |
|
|
→ |
|
|
|
Mз m |
|
|||
|
Mз m r |
|
|
|
|
||||||
FG= G |
|
|
; |
|
FG = G |
|
|
! ; |
|
||
r3 |
|
|
r2 |
|
|||||||
|
|
|
|
→ |
|
(29) |
|
||||
→ |
→ |
|
|
|
|
|
|
|
|
||
Mз R |
|
|
Mз |
|
|||||||
P = m g ≡ G |
|
, |
g = G |
|
; g = 9, 8 |
||||||
R3 |
R2 |
||||||||||
|
|
|
|
z |
|
(30) |
|
||||
|
|
|
|
|
|
|
|||||
|
3. Сила пружної деформацiї твер- |
|
|||||||||
дого тiла: |
|
|
|
→ |
→ |
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Fпд= − k |
x, |
||||
Рис. № 7:
!
м/с2 .
(31)
де ~x – вектор деформацiї, k – коефiцiєнт пружностi.
11

1.2.6Закон збереження iмпульсу
Для замкнутої системи тiл (або сукупностi тiл) сума iмпульсiв тiл дорiвнює константi, не залежить вiд часу i не залежить вiд числа актiв взаємодiї мiж тiлами замкнутої системи
→ → N
p = X pi = X mi~vi ≡ const. (32)
ii=1
1.2.7Робота сили
|
~ |
|
|
Робота dAF змiнної сили F (r) на |
|
|
|
дiлянцi траєкторiї 1−2 (рис. 8) є скаляр- |
|
|
|
|
~ |
|
|
ний добуток вектора сили F (r) та вектора |
|
|
|
перемiщення d~r тiла (матерiальної точки) |
|
|
|
|
dAF = F~ (r) d~r , |
|
|
|
|
r2 |
|
|
AF = Z F~ (r) d~r = |
|
|
|
|
r1 |
|
|
r2 |
Fs(r) · cos α · dr , |
|
|
= Z |
(33) |
|
|
r1 |
|
|
|
|
~ |
|
|
де α – кут мiж векторами F (r) та d~r. |
||
|
Зауважимо, що кiлькiсть роботи AF , |
||
Рис. № 8: |
|
~ |
|
|
яку виконує змiнна сила F (r), дорiвнює |
||
площi (рис. 9) пiд кривою Fs(r) Це є геометричним змiстом формули (33) – роботи, що виконує зовнiшня сила.
Миттєва потужнiсть – похiдна вiд |
роботи по часу |
|
|||
N (r) = |
dAF |
= |
F~ (r) d~r |
. |
(34) |
dt |
|
||||
|
|
dt |
|
||
Якщо вектор сили не залежить
вiд та вiд часу ( ~ ), мит- r t F = const
тєва потужнiсть N залежить вiд добутку модулiв сталої сили F та
12

швидкостi матерiальної точки (тi-
ла) v = dr dt
→ d~r ! N = F dt =
→→
= F v = F · v · cos α, (35)
~ |
та ~v. |
де α – кут мiж векторами F |
1.2.8Енергiя тiла
Кiнетична енергiя T тiла залежить вiд швидкостi v тiла i визначається
|
|
|
~ |
, щоб збiльшити швидкiсть тiла вiд 0 |
|||||||||||
роботою AF , яку виконує деяка сила F |
|||||||||||||||
до v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
r2 |
dr |
r2 |
|
|
dr |
v dv |
|
|||||||
T ≡ AF = Z |
F dr = Z |
F |
|
dt = Z |
m a |
|
|
dt = m Z |
|
v dt . |
(36) |
||||
dt |
dt |
dt |
|||||||||||||
r1 |
r1 |
|
|
|
r1 |
|
|
|
|
|
0 |
|
|
|
|
Тобто |
|
v v dv = |
m v2 |
v |
|
|
m v2 |
|
|
|
|
||||
|
T = m |
= |
, . |
|
|
(37) |
|||||||||
|
|
|
|
|
|||||||||||
|
Z |
|
|
|
2 |
|
2 |
|
|
|
|
||||
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Потенцiальна енергiя Π тiла визначається вiдносним розташуванням тiла вiдносно iнших тiл. Наприклад, потенцiальна енергiя тiла Π, яке пiднято над поверхнею Землi на висоту h, дорiвнює роботi A сили проти сили тяжiння тiла (F = p ≡ m g), щоб висота тiла над поверхнею Землi збiльшилась вiд 0 до деякої висоти h
h |
h |
|
|
AF ≡ Π(h) = Z |
m g dh = m g Z |
dh = m g h + c, |
(38) |
0 |
0 |
|
|
де стала iнтегрування c дорiвнює нулю, якщо прийняти, що на поверхнi Землi (h = 0) потенцiальна енергiя дорiвнює нулю (Π(0) = 0).
Робота Ap сили тяжiння p~, пiд дiєю якої висота тiла над поверхнею Землi зменшується вiд h до 0, дорiвнює
0 |
dx = Π(0) − Π(h) = −dΠ = −m g h. |
|
Ap = m g Z |
(39) |
|
h |
|
|
Тобто |
−Ap = dΠ або − p dx = dΠ. |
|
Ap = −AF |
(40) |
13

У загальному випадку, консервативна сила F , що дiє на деяку масу замкнутої системи тiл вздовж осi x, визначається як Fx = −dΠdx . Для випадку, коли сила
~ розглядається в тривимiрному просторi, маємо
F
F→= |
− |
grad Π = |
− |
∂Π |
e→1 |
+ |
∂Π |
e→2 |
+ |
∂Π |
e→3 |
! |
, |
(41) |
|
|
|
||||||||||||
|
|
∂x |
|
∂y |
|
∂z |
|
|
|
|||||
де ~e1, ~e2 та ~e3 – одиничнi вектори декартової системи координат.
Потенцiальна енергiя тiла Π, яке пружно деформовано, дорiвнює роботi A проти сили пружної деформацiї Fпд = −k · x i залежить вiд величини x, що характеризує його деформацiю
2 |
2 |
|
k |
x2 |
|
|
Π = Z |
Fпдdx = −k Z |
|
(42) |
|||
xdx = |
|
. |
||||
|
2 |
|||||
1 |
1 |
|
|
|
|
|
Основна ознака того, що поле є потенцiальним заключається в тому, що робота A(r1, r2), яку виконують внутрiшнi (консервативнi) сили замкнутої системи тiл при перенесеннi деякої маси у цьому полi, не залежить вiд форми шляху, по якому переноситься тiло, а залежить лише вiд рiзницi потенцiальних енергiй тiла Π2 та Π1 вiдповiдно в кiнцевiй та початковiй точках траєкторiї руху тiла
A(r1 − r2) = Π2 − Π1 = −dΠ. |
(43) |
→
Тобто робота A(r1, r2, r1) (циркуляцiя довiльного вектора F консервативної сили), яку виконують внутрiшнi сили для переносу маси вздовж замкнутої траєкторiї (1 − 2 − 1) в потенцiальному полi дорiвнює нулю
A(r1, r2, r1) = (Π2 − Π1) + (Π1 − Π2) = −dΠ + dΠ = 0, |
(44) |
→
В iнтегральнiй формi циркуляцiя вектра F , яка для потенцiального поля дорiвнює нулю, має вигляд
A(r1, r2, r1) = I |
(F→ d→L) = I |
FL dL = 0. |
(45) |
L |
L |
|
|
Повна енергiя тiла E дорiвнює сумi кiнетичної i потенцiальної енергiй
E = T + Π. |
(46) |
1.2.9Закон збереження механiчної енергiї
Закон збереження механiчної енергiї для консервативної (замкнутої) системи тiл полягає в тому, що її повна енергiя (сукупна потенцiальна i кiнетична енергiя тiл) у будь-який момент часу дорiвнює константi
E = T + Π ≡ const. |
(47) |
14

1.2.10Пружна i непружна взаємодiя тiл
Швидкiсть тiл v пiсля абсолютно непружного удару (два тiла пiсля взаємодiї рухаються як одне цiле) знаходиться iз закону збереження iмпульсу тiл для замкнутої системи
m1~v1 + m2~v2 = m1~v + m2~v, |
|
||
m1v1 ± m2v2 = v(m1 + m2). , |
(48) |
||
v = |
m1v1 ± m2 |
. |
(49) |
|
m1 + m2 |
|
|
Знак ± у виразах (48) та (49) означає, що проекцiї швидкостей двох тiл до зiткнення можуть мати однаковi знаки, якщо швидкостi спрямованi в один i той же бiк, або протилежнi знаки, коли швидкостi спрямованi назустрiч одна однiй. Отриманий знак вiдповiдi у виразi (49) буде визначати напрям сумiсної швидкостi двох тiл пiсля зiткнення вiдносно обраного напрямку вiсi, на яку проектуються швидкостi тiл.
При цьому закон збереження механiчної енергiї системи, яка включає лише два тiла, не виконується, бо при абсолютно непружному ударi (зiткненнi, взаємодiї) деформованi тiла з’єднуються в одне i якась частина енергiї тiл, якi вони мають до взаємодiї, переходить у внутрiшню енергiю тiл та розсiюється в оточуючому середовищi.
При абсолютно непружному ударi можна визначити швидкiсть декiлькох тiл пiсля їх взаємодiї (пiсля їх об’єднання в одне). Тодi вираз (49) можна переписати для загального випадку
N |
( |
± |
mi vi) |
(50) |
|
v = iP |
|
, |
|||
=1 |
|
|
|
|
|
|
N |
mi |
|
||
|
iP |
|
|
|
|
|
=1 |
|
|
|
|
де N – кiлькiсть тiл, якi взаємодiють.
Швидкостi двох тiл v1, ,2 пiсля абсолютно пружного удару визначаються з рiвнянь, якi вiдповiдають законам збереження iмпульсу та збереження
енергiї замкнутої системи двох тiл до i пiсля взаємодiї |
|
|||||||||||||||
|
m ~v |
1 |
+ m ~v |
2 |
= m ~v, |
+ m ~v, ; |
|
|
|
|||||||
1 |
2 |
|
1 |
1 |
2 |
2 |
|
|
|
|||||||
|
m1v1 ± m2v2 = m1v1, |
+ m2v2, ; |
|
|
(51) |
|||||||||||
|
m1v12 |
|
m2v22 |
|
|
|
m1(v1, )2 |
|
m2(v2, |
)2 |
|
(52) |
||||
|
|
+ |
|
|
= |
|
|
|
+ |
|
|
|
. |
|||
2 |
2 |
|
2 |
|
|
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
15

Якщо тiла до абсолютно пружного удару рухаються в один i той же бiк, як спрямована обрана вiсь OX, розв’язок системи рiвнянь (51) та (52) буде визначати модулi двох швидкостей v1, та v2, тiл пiсля їх абсолютно пружному зiткненнi
v1, ,2 = |
(m1,2 − m2,1) + 2m2,1v2,1 |
. |
(53) |
|
m1 + m2 |
|
|
Отриманi знаки швидкостей v1, та v2, тiл пiсля розрахункiв, згiдно з формулами (51) та (52), визначать напрямки цих швидкостей вiдносно напрямку обраної осi OX.
При абсолютно пружному ударi задача визначення швидкостей тiл пiсля взаємодiї розв’язується лише у випадку взаємодiї двох тiл, бо для знаходження швидкостей тiл пiсля зiткнення iснує лише два рiвняння (i не бiльше), якi є наслiдком виконання двох законiв збереження – механiчної енергiї та iмпульсу.
1.2.11Динамiка твердого тiла
Центр маси твердого тiла – визначається як радiус-вектор rc у декортовiй системi координат за допомогою формули
|
∞ ~r m |
|
∞ |
~r m |
(54) |
|
~rc = iP |
= P |
, |
||||
|
i i |
|
i=1 |
i i |
|
|
|
=1 |
|
|
|
|
|
|
∞ m |
|
|
m |
|
|
|
iP |
|
|
|
|
|
|
i |
|
|
|
|
|
=1 |
|
|
|
|
|
|
де ~ri – радiус-вектор mi-частки вiд всiєї маси тiла.
Iмпульс твердого тiла (або сукупностi тiл) при поступальному русi є
→ |
|
|
|
|
|
|
|
|
∞ |
mi та вектора |
вектор pc, що дорiвнює добутку маси твердого тiла m = |
X |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
швидкостi центра маси твердого тiла (або маси сукупностi тiл) |
||||||||||
p~c = |
∞ mi d~ri |
= |
d ∞ mi ~ri |
= m d~rc . |
|
(55) |
||||
|
X |
dt |
|
dt |
X |
|
dt |
|
|
|
|
i=1 |
|
i=1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
Момент iнерцiї тiла (або системи матерiальних точок) вiдносно нерухомої осi обертання є скалярна величина
∞ |
2 |
= Z |
2 |
dm |
(56) |
J = i=1 mi ri |
r |
||||
X |
|
|
|
|
|
i вводиться для того, щоб характеризувати обертальний рух твердого тiла. Для прикладу пiдрахуємо момент iнерцiї цилiндра
висотою h i радiусом основи R вiдносно осi симетрiї цилiндра, яка є перпендикулярною до його основи.
16
В серединi цилiндра видiлимо кiльце (або шар) на вiдстанi r вiд осi обертання цилiндра та товщиною dr та висотою h (рис. 10). Момент iнерцiї видiленого шару масою
dm = π (r + dr)2 h ρ − π r2 h ρ 2π r h ρ dr (57)
(враховуючи те, що (dr)2 rh ) елементарна маса шару dm дорiвнює
|
R |
|
π h |
R4 ρ |
|
|
|
dJ = r2dm J = Z |
r2 dm = 2π ρ h Z |
r3 dr = |
, |
(58) |
|||
|
2 |
||||||
|
0 |
|
|
|
|
|
де ρ – питома густина речовини цилiндра. Виходячи з того, що маса цилiндра дорiвнює m =
π R2 h ρ, отримаємо
|
m R2 |
(59) |
||
J = |
|
. |
||
2 |
||||
|
|
|
||
Для деяких симетричних тiл моменти iнерцiї вiдносно осей обертання, якi спiвпадають з осями симетрiї даних тiл, наводяться як табличнi данi.
Теорема Штейнера дозволяє визначити момент iнерцiї тiла вiдносно довiльної осi, яка проходить на вiдстанi a вiд осi, яка проходить через центр маси та спiвпадає з вiссю симетрiї тiла, за допомогою рiвняння
J = Jc + ma2. |
(60) |
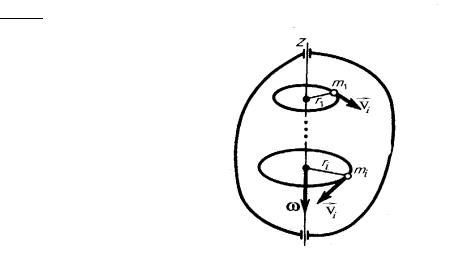
Кiнетична енергiя тiла, що обертається Tоб, дорiвнює нескiнченнiй сумi кiнетичних енергiй матерiальних точок, з яких складається тiло.
X
∞ mi v2
Tоб = i . (61)
i=1 |
2 |
|
Кожна i-а матерiальна точка твердого тiла (рис. 11) обертається зi своєю лiнiйною швидкiстю vi, величина якої залежить вiд вiдстанi ri цiєї точки до осi обертання тiла. Але всi точки тiла обертаються з однiєю кутовою швидкiстю ω. Причому, ω ri = vi i тому вираз (61) можна переписати
Tоб = ω2 |
∞ mi ri2 |
= J ω2 . |
(62) |
|||
|
X |
|
|
|
|
|
|
i=1 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
17
Повна енергiя тiла, яке рухається поступально та обертається Tпов приклад, колесо автомобiля), є
Tпов = |
J ω2 |
+ |
m vc2 |
|
|
||
2 |
2 |
||
(на-
(63)
→
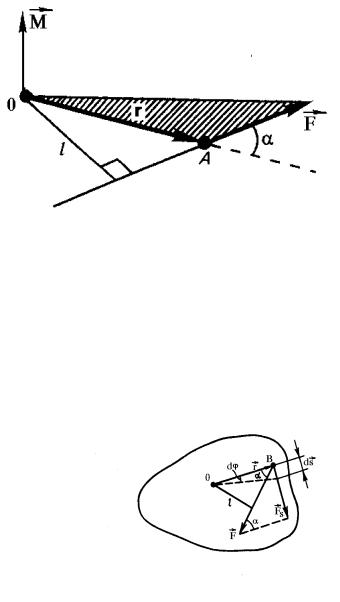
Момент сили M вiдносно нерухомої осi є псевдовектор (рис. 12), який
дорiвнює векторному добутку векторiв та ~ ~r F
M→ = →r F→ |
= M = r F sin α = F l (l = r sin α) . |
(64) |
→ |
|
|
Псевдовектор M є перпендику- |
|
|
|
~ |
|
лярним до векторiв ~r та F i спiвпа- |
|
|
дає з вiccю обертання тiла. Напрям |
|
|
~ |
|
|
вектора M визначається за прави- |
|
|
лом "правого гвинта". |
|
|
Визначимо роботу dA, яку необ- |
|
|
хiдно виконати, щоб |
повернути |
|
тверде тiло на деякий кут dϕ
|
|
|
|
~ ~ |
= |
|
|
dA = F dS |
|
|
|
= F r dϕ cos β, |
(65) |
|
|
|
~ |
~ |
Рис. № 12: |
де β – кут мiж векторами F |
та dS |
|
|
(dS = rdϕ). Для обчислення dA необхiдно знайти модуль складової частини
вектора сили |
~ |
вздовж напряму вектора перемiщення |
~ |
(рис. 13), який |
|
F |
dS |
||||
дорiвнює |
|
|
|
|
|
|
Fs = F · sin α , |
(66) |
|
|
|
|
|
~ |
. Тобто |
|
|
де α – кут мiж векторами ~r та F |
|
|
|||
|
|
dA = F · r · sin α · dϕ . |
|
(67) |
|
Згiдно з визначенням моменту сили останнiй вираз можна переписати
|
|
|
|
dA = |
~ |
~ |
(68) |
M dϕ . |
|||
Враховуючи те, що згiдно з законом збереження енергiї dA = dT i те, що
dT = d |
|
J ω2 |
, отримаємо |
|
Рис. № 13: |
|
2 |
|
|
|
|||
|
|
|
|
M~ d~ϕ = J ~ω d~ω . |
|
|
|
|
|
dT = J ω dω |
|
(69) |
18
Останнє рiвняння перепишемо та отримаємо головне рiвняння динамiки
обертального руху твердого тiла
M~ |
d~ω |
! |
= J |
~ω |
d~ω |
! |
|
M~ = J |
d~ω |
= J ~ε. |
(70) |
|
|
dt |
|||||||||
|
dt |
|
|
dt |
|
|
|
||||
→
Момент iмпульсу L твердого тiла вiдносно нерухомої осi обертання є векторний добуток векторiв ~r та p~
→L= |
r→i p→i |
= |
|
mi |
r→i |
v→i |
L = |
|
mi ri vi sin |
π |
. |
(71) |
|||||
i |
i |
2 |
|||||||||||||||
i |
h |
i |
|
|
h |
i |
|
|
|
|
|
||||||
X |
|
|
X |
|
|
|
|
X |
|
|
|
|
|||||
Враховуючи те, що →v = h→ω →r i |
|
(v = ω r), отримаємо |
|
|
|
|
|||||||||||
|
|
|
L = |
X |
mi ri2 |
ω = J ω . |
|
|
|
|
(72) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
буде |
|
|||
У векторному виглядi рiвняння для моменту iмпульсу L |
|
||||||||||||||||
|
|
→ |
|
|
→ |
|
|
~ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
dL |
|
|
|
|
|
(73) |
||||
|
|
L= J |
ω |
|
|
dt = J ~ǫ. |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Звiдки отримуємо другий запис головного рiвняння динамiки оберталь- |
||||
|
|
|
→ |
зi змiною |
ного руху твердого тiла, яке з’єднує вектор моменту сили M |
||||
→ |
у часi |
|
|
|
вектора L |
→ |
|
|
|
|
→ |
d L |
|
(74) |
|
M = |
|
. |
|
|
dt |
|||
|
|
|
|
|
1.2.12Закон збереження момента iмпульсу
Закон збереження момента iмпульсу для замкненої системи (наприклад, для одного iзольованого тiла, що обертається, i на яке не дiють нiякi зовнiшнi сили)
→ |
→ |
|
|
d L |
|
||
M = 0 = |
|
|
= 0 , |
dt |
|||
→ |
|
|
(75) |
L= const. |
|
|
|
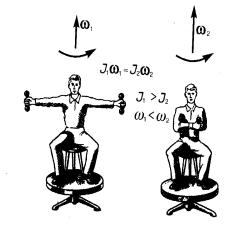
Тобто, при змiнi кутової швидкостi обертiв твердого тiла, закон збереження момента iмпульса (вираз (75)) можна представити у виглядi рiвняння
J1 ω1 = J2 ω2 , |
(76) |
де J1, ω1 та J2, ω2 вiдповiдно моменти iнерцiї i кутовi швидкостiРис. №обертань14: |
тiла |
до i пiсля змiни моменту iнерцiї тiла. |
|
19
1.3Статика
Статика розглядає умови нерухомого стану матерiальної точки, або твердого тiла, що може мати нерухому вiсь обертання. Поперше, матерiальна точка, або тiло зберiгає стан
→ →
спокою, якщо рiвнодiюча R всiх сил Fi, якi дiють на тiло, дорiвнює нулю
→
R =
N → |
(77) |
F i ≡ 0. |
|
X |
|
i=1
По-друге, векторна сума |
→ |
|
|
|
|
|
|
|
|
|
|||
M всiх моментiв сил |
|
|
|
|
|||||||||
→ |
вiдносно деякої вибраної нерухомої осi теж |
|
|
|
|
||||||||
Mi |
|
|
|
|
|||||||||
повинна дорiвнювати нулю |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
→ |
= |
N |
→ |
|
|
|
|
|
(78) |
|
|
|
|
M |
X |
M i ≡ 0. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
У скалярному виглядi останнiй вираз дає ”золоте правило” механiки |
|||||||||||||
|
|
± |
N |
ri · Fi · sin αi |
= ± |
N |
li · Fi ≡ 0 , |
|
(79) |
||||
|
|
|
X |
|
|
|
|
X |
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
i=1 |
|
|
→ |
|
→ |
де |
l |
= r sinα – плече сили, α |
– кут мiж векторами |
та |
|||||||||
|
r |
F ; знак "+ або |
|||||||||||
|
|
|
|
|
|
|
|
|
→ |
|
|
|
|
"−" береться залежно вiд напрямку векторiв M i |
вiдносно напрямку довiльно |
||||||||||||
обраної осi. |
|
|
|
|
|
|
|
|
|
|
|
||
|
Наприклад, ”золоте правило механiки” доз- |
|
|
|
|
||||||||
|
|
|
|
→ |
|
|
|
|
|
|
|
|
|
воляє визначити рiвнодiючу R двох (або довiль- |
|
|
|
|
|||||||||
ного числа) паралельних сил, спрямованих в один |
|
|
|
|
|||||||||
i той самий бiк, та якi мають рiзнi точки прикла- |
|
|
|
|
|||||||||
дення до тiла, що точка прикладення результу- |
|
|
|
|
|||||||||
|
|
→ |
|
|
|
|
|
|
|
|
|
|
|
ючої сили R дiлить вiдрiзок, який з’єднує точки |
|
|
|
|
|||||||||
|
|
|
→ |
→ |
|
|
|
|
|
|
|
|
|
прикладання двох сил |
F 1 |
i F 2, на двi частини l1 |
|
|
|
|
|||||||
i l2 у обернено пропорцiйному вiдношеннi порiв- |
|
|
|
|
|||||||||
няно з вiдношенням модулей сил F1 i F2 |
|
|
|
|
|
|
|||||||
|
|
l1/l2 = F2/F1. |
|
|
|
(80) |
|
|
|
|
|||
20