

TEP / lekcher_1
.1.pdfвыделена область существования. Фазовый портрет – динамическая |
|||
механическая характеристика. |
|
ω |
|
|
|
|
|
ω,M |
|
|
1 |
M(t) |
|
|
2 |
ω(t) |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
Mc |
M |
|
t |
1 – статическая характеристика; |
|
|
2 – без ограничения по скорости; |
||
|
|
||
|
|
3 – ограничение по скорости. |
|
Т.к. ускорение определяется электромагнитным моментом, а точнее |
|||
динамическим моментом, в |
общем |
случае избыточным, |
то на графиках |
откладывать необходимо M(t), а не ω′. Электрическая машина имеет одну статическую характеристику,
динамических характеристик может быть много. Задача ЭП : обеспечить изменение во времени скорости рабочего вала по заданному закону.
ω(t) задается тахограммой.
ϕmax |
′ |
|
|
ω,ω |
,ϕ |
|
|
ω′max |
ω′ |
ϕ |
|
ωmax |
|
ω |
|
|
|
|
|
|
|
tmax |
t |
−ω′max |
|
|
|
Кинематическая оценка передач
1. Передаточное отношение
i = ωвх
ωвых
Если редуктор многоступенчатый :
n
i = ∏ij
j=1
В большинстве случаев i = const. При нарушении постоянства i возникают колебания скорости, неравномерность хода, а как следствие возникают дополнительные динамические нагрузки. Постоянство i не всегда имеет место, а в общем случае мгновенное передаточное число колеблется
относительно некоторого среднего передаточного отношения i0 и может быть выражено :
|
|
n |
k |
|
|
i = i0 + ∑∑ imaxk cos(Ωk t) |
(1) |
||
|
imaxk |
1 |
1 |
|
Где |
– |
k – я амплитуда переменной составляющей; |
|
|
|
|
|||
|
Ωk |
– |
спектр частот возмущений передаточного отношения, |
|
|
|
|||
|
|
обусловленный погрешностями различных |
элементов |
|
|
|
|
передачи; |
|
|
n |
– |
общее число валов в зацеплении передачи. |
|
Правило. При анализе динамических ЭП из всего спектра частот Ωk выделяют те, которые имеют наибольшее значение для ЭП, а так же те, которые ближе к частоте свободных колебаний привода.
Наиболее существенные частоты, если не рассматривать резонансные явления, лежат в области частоты среза разомкнутой системы.
1.Радиус приведения
ρ= ϑвых
ωвх
Обычно ρ принимаем неизменным. Но при исследовании динамики, особенно высокоточных механизмов, необходимо учитывать изменение
радиуса приведения по аналогии с (1), только вместо i надо ρ. 1. Зазоры или люфты в передачах.
Наличие зазоров является характерной особенностью ЭП, передаточный механизм которых содержит зубчатые, цепные и т.п. механизмы. Определенный минимальный зазор необходим всегда для нормальной работы передачи. Однако с течением времени в результате износа зазоры увеличиваются, следовательно, увеличивается их влияние на условия работы привода. Это влияние неблагоприятно. При выборе зазоров возникают удары, усиливающие износ передачи. Для избежания ускоренного износа необходимы ступени безударного пуска.
Пример. Во взаимно связанных механизмах точных машин зазор является фактором, снижающим точность выполнения технологической операции. В следящем ЭП зазоры уменьшают точность слежения за объектом.
Обычно зазор выражается в угловом перемещении. Общее выражение зазора в ЭП обычно приводят к исследуемому валу, но чаче всего требуется приводить его к валу двигателя, а точнее к скорости вращения вала двигателя.

|
|
|
|
n |
|
|
|
k |
|
Sзj |
|
|
||
|
Δϕ |
з |
= |
∑ |
Δϕ |
i |
+ |
|
|
|
|
(2) |
||
|
|
|
|
|||||||||||
|
|
|
|
зi 1i |
|
∑ ρ |
|
|
|
|||||
|
Δϕзi |
|
i=1 |
|
|
|
j=1 |
|
1j |
|
|
|
||
Где |
|
– |
действительные зазоры в соответствующих зацеплениях, |
|||||||||||
Sзj |
|
выраженные в угловом перемещении i – го вала; |
|
|||||||||||
|
|
– |
действительные зазоры в связях с поступательно |
|||||||||||
|
|
|
|
движущимися |
|
массами, выраженные в |
линейном |
|||||||
перемещении j – ой массы.
Очевидно, что в динамике в период выборки зазора, т.е. когда ϕ угол закрутки вала меньше Δϕзmax имеет место разрыв кинематической цепи
привода, т.е. энергия не передается через зазор. |
|
|
|
|
|
||||||||
При |
исследовании ЭП зазор учитывается нелинейным звеном |
||||||||||||
(нелинейностью в виде люфта). |
|
|
|
|
|
||||||||
|
|
|
|
|
зазор |
|
M12 |
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
С12 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
Δϕ |
|||||||
J1 |
|
|
|
|
|
|
J2 |
|
|
|
|||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Δϕзmax |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
Зазор учитывается в виде нелинейности момента. Проблемы :
−Появляются автоколебания в системе (т.к. в структурной схеме присутствует нелинейное звено).
Наиболее простой метод решения – на первую массу наложить вибрации системы, при частоте системы стремящейся к бесконечности, зазор выбирается.
2.Специальные преобразовательные устройства (ПУ) обеспечивающие преобразование вращательного движения в поступательное.
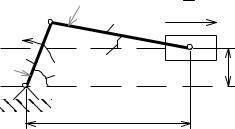
Часто встречаются с кривошипно-шатунными передачами. Привод с
кривошипно-шатунной передачей работает в квазистационарном режиме, т.е. в установившемся динамическом режиме, а не в стационарном режиме.
Кривошипно-шатунный механизм
Пусть кривошипно-шатунная передача смещена, это нормальный механизм. Получим вывод радиуса приведения ρ (ползун при этом смещен).
|
ползун |
ϑ |
e |
− |
ω |
l |
r |
− |
|
|
l |
− |
||
кривошип r |
ϕ φ |
|
||
|
e |
|
S
r cos(ϕ) + lcos(φ) =S rsin (ϕ) = lsin (φ) + e
Разделив на l получим в относительных единицах :
cos(φ) = σ −λcos(ϕ) sin (φ) = λ(sin (ϕ) −χ)
λ = |
r |
σ = S |
χ = e |
|
|
||||
l |
|
|
|||||||
Где |
|
, |
l , |
|
r |
|
|
||
Дифференцируя (2) получим : |
|
|
|||||||
|
′ |
|
|
′ |
|
′ |
|
|
|
−φ sin (φ) |
= σ + λϕ sin (ϕ) |
|
|||||||
′ |
|
|
|
|
′ |
|
|
|
|
φ cos(φ) = λϕ cos(ϕ) |
|
|
|||||||
Из (3) получим : |
|
|
|
|
|
|
|||
′ |
|
|
|
|
|
′ |
|
sin (ϕ+ φ) |
|
σ |
|
|
|
|
|
φ |
|
||
′ |
= −λsin (ϕ) − |
|
sin (φ) = −λ |
|
|||||
′ |
cos(φ) |
||||||||
ϕ |
|
|
|
|
|
ϕ |
|
||
Скорость и ускорение ползунка :
σ′ = ϑl
ϑ = −rωsin (ϕ+ φ) cos(φ)
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
cos(ϕ+ φ)cos(φ)ϕ |
+ |
|
||||||
|
|
|
|
cos |
2 |
(φ) |
||||||
|
|
|
|
|
|
|
|
|
||||
|
dϑ |
|
|
|
|
|
|
|
|
|
′ |
|
a = |
= −rω |
+ |
cos(ϕ+ φ)cos(φ)φ |
+ |
||||||||
dt |
cos |
2 |
(φ) |
|
|
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
+ |
sin (ϕ+ φ)sin (φ)φ′ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
cos |
2 |
(φ) |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
Радиус приведения получается из (5) :
ρ= ϑ = −r sin (ϕ+ φ)
ωcos(φ)
смещение; длина шатуна; длина кривошипа.
(1)
(2)
(3)
(4)
(5)
(6)
(7)

Выражения (5) и (6) справедливы как для e = 0, так и для смещений e ≠ 0.
Рассмотрим (5) и (6) при стационарном движении :
λ <1, 1−λ > λχ.
′ |
|
sin (ϕ+ φ) |
|
|
|
|
|
|
|
σ |
= −λ |
= −λ(sin (ϕ) |
+ cos(ϕ)tg(ϕ))= |
|
|||||
′ |
cos(φ) |
|
|||||||
ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
sin (φ) |
|
|
(8) |
||
|
|
|
|
|
|||||
= −λ sin (ϕ) + cos(ϕ) |
|
|
|
|
|
|
|||
|
|
|
|
|
|||||
|
|
|
|
1−sin |
2 |
|
|
|
|
|
|
|
|
|
(φ) |
|
|||
Чтобы убрать трансцендентное уравнение воспользуемся разложением в ряд. Разложив в биномиальный ряд и ограничившись первыми двумя членами
ряда, а так же исключив sin (φ) получим выражение для ρ :
ρ = |
ϑ |
|
λ |
|
ω |
= −r sin (ϕ) + |
2 |
sin (2ϕ) −λχcos(ϕ) |
|
|
|
|
ϑ= ωρ
a = ddtϑ = −r cos(ϕ)ϕ′− rλcos(2ϕ)ϕ′− rλχsin (ϕ)ϕ′
Для обычного кривошипа при e = 0 получим :
ρ = |
ϑ |
|
|
λ |
|
ω |
= −r sin (ϕ) + |
2 |
sin (2ϕ) |
||
|
|
|
|
||
ρ является функцией |
ϕ. Примем условие, что l r, т.е. λ = 0 |
||||
выражение :
ρ = ωϑ = −rsin (ϕ)
(9)
(10)
(11)
(12)
и получим
(13)
Т.е. перемещение и ускорение будут изменяться по закону косинуса (cos), а скорость по закону синуса (sin).
ϑ = ρω= −rωsin (ϕ) |
|
|
(14) |
||||
Ускорение : |
|
|
|
||||
′ |
|
′ |
|
= −rω |
2 |
cos(ϕ) |
(15) |
|
|
||||||
a = −rωcos(ϕ)ϕ = |
|
ϕ = ω |
|
|
|||
Динамические свойства преобразовательных устройств.
1.Моменты инерции звеньев. Обычно момент инерции задается для редуктора. В справочнике :
J = mr2

[J]= кг м2 ≡ Н м2 → J кг м2 = J Н м2 g
Иногда в справочниках дается внесистемная единица маховый момент :
|
GD2 |
|
2 |
|
|
J = |
GD2 |
|
Н м2 |
|
J = |
4 |
кг м |
|
или |
|
4g |
|
|
. |
|
2.Оценка деформации упругих элементов. Как правило, преобразовательные устройства совершают вращательное движение, следовательно, мы делаем оценку при помощи коэффициента жесткости кручения.
При параллельном соединении упругих элементов результирующая жесткость равна сумме жесткостей элементов :
n
Cэкв = ∑C12i i=1
Податливость упругого элемента – величина обратная жесткости :
e12 = 1
C12
При последовательном соединении упругих элементов результирующая податливость равна сумме податливостей элементов :
n
eэкв = ∑e12i i=1
3.Энергетические характеристики преобразовательных устройств. В любых преобразовательных устройствах имеет место потеря энергии, которая зависит как от конструкции самого преобразовательного устройства, так и от величины и направления передаваемой мощности или момента. Кроме того, винтовые и глобоидные передачи характеризуются тем, что у них потери зависят от скорости вращения ведущего вала. Передачи делятся на :
−Самотормозящие;
−Не самотормозящие.
Если передача самотормозящая, то передача момента (M) со стороны ведомого вала к ведущему невозможна. При наличии такой передачи в кинематической цепи двигатель никогда не может работать в режиме рекуперации энергии в сеть.

η |
max |
|
|
|
P2 |
Потери в передачах могут быть приблизительно оценены КПД передачи. КПД зависит от мощности и скорости. Для включенных последовательно передач справедливо соотношение :
n
ηэкв = ∏ηi
i=1
Задача : Представить КПД машины через КПД номинальный. Представим потери в передачах как сумму постоянных (const) и переменных (var) потерь,
причем переменные потери пропорциональны P2 .
|
|
|
|
|
|
|
|
|
|
|
|
|
b = |
|
|
P |
= |
|
Pv _ ном |
= const |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|||||||
|
P = bP |
|
|
|
|
|
P |
|
|
|
|
||||||||||||||||||||||
|
, |
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
v |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ном |
|
|
|
|
|
|
|
|
|||||
χ = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ном . |
|
P |
|
|
|
|
|
|
|
|
χPном |
|
|
|
|
|
|
|
|
||||||||||
η= |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
= |
|
|
||||||||||||
P + |
|
P + |
P |
|
χP |
|
+ |
|
P |
+ |
|
P |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
v |
c |
|
|
|
ном |
|
|
|
|
v |
|
|
|
c |
|
|
|||||||
|
|
|
|
|
|
|
|
|
χPном |
|
|
|
|
|
|
|
|
|
|
|
|
Pc |
|
|
|
|
|
|
|||||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
= j = |
|
|
|
= |
|
|
|
|
|||||||||||
|
χPном + χbPном + |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
Pc |
|
|
|
|
Pном |
|
|
|
|
|
|||||||||||||||||||||
= |
|
|
|
χ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
χ(1+ b) + j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ηном = |
|
|
|
|
|
|
|
|
Pном |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Pном + |
Pv _ ном + |
Pc _ ном |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
P |
|
|
= |
|
|
|
|
|
|
|
Pc _ ном |
= |
1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
ном |
|
|
jном = |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Pном + bPном + |
Pc _ ном |
|
|
|
|
|
|
|
|
Pном |
|
|
|
1+ b + jном |
|||||||||||||||||||
b = |
|
1 |
|
|
|
−(1+ j |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
ηном |
|
|
|
|
|
ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
χ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
η= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
χ(1+ |
1 |
−(1+ j )) |
+ j |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ηном |
|
|
|
ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В реальных задачах и зависит от вида передачи и номинального КПД. В случае наличия самотормозящей передачи следует учитывать направление энергии.

Силы и моменты, действующие в ЭП
При рассмотрении режимов работы ЭП силы и моменты приводят, как правило, к валу двигателя (к расчетной скорости). Состояние привода зависит от действия вращающего момента двигателя (электромагнитного момента) и статического момента рабочей машины. Статические моменты определяются действием “полезных” и “вредных” сил сопротивления (силами трения, силами резания, деформации неупругих тел, массой или деформацией упругих тел).
M |
− |
движущий момент (электромагнитный момент); |
||
MC |
− |
статический момент, может быть как движущим, так и |
||
|
|
|
|
тормозящим, в зависимости от режима работы двигателя и |
|
|
|
|
характера нагрузки (речь идет о статическом режиме). |
M |
|
|
Статический режим – равенство моментов движущего (M) |
|
|
|
|
|
и статического ( MC). |
|
|
|
|
|
|
|
(-) |
||
|
|
MC |
|
|
|
|
|
||
Для обеспечения динамического режима (разгон привода) необходимо сообщить дополнительную кинетическую энергию вращения. Следовательно динамика привода определяется действием результирующего момента от моментов движущего и статического.
Рассмотрим многомассовую систем у которой упругие связи
отсутствуют, тогда : |
|
|
|
|
|||
±M ± MC = Mдин |
MC |
- задан (мы не можем влиять); |
|||||
|
|
|
|
|
|
M |
- момент электромагнитный двигателя |
|
|
|
|
|
|
(определяется свойствами двигателя). |
|
Физический смысл динамического момента : |
|||||||
Mдин = J dω |
|
|
(свойства механической системы ЭП) |
||||
|
dt |
|
|
|
|
||
|
dω |
|
|
ускорение (изменять нельзя, оно задано) |
|||
J = const , |
dt |
|
|
||||
dWК dt |
|
|
|||||
Mдин = |
Pдин |
|
= |
|
|
||
ω |
|
ω |
. |
|
|
||
У машины постоянного тока момент ограничен током якоря. M – движущий или тормозящий момент, определяется свойствами привода. Заданный момент можно получить, выбрав необходимый тип и серию машины.
−Момент, способствующий вращению, принимается с тем же знаком, что и направление вращения, а препятствующие вращению с обратным знаком.

−Момент двигателя в двигательном режиме имеет тот же знак, что и скорость вращения.
−В тормозных режимах (динамическое торможение, рекуперативное торможение, торможение противовключением) знаки момента двигателя и скорости вращения различны.
M |
|
|
|
|
1 |
|
ω |
MC – нагрузка, создается рабочим органом. Все |
|
|
|
|
|
||||
|
|
(-) |
|
Jp |
|
|
нагрузки (статические моменты, силы) могут |
|
|
|
|
|
|||||
|
|
|
|
|
|
иметь реактивный или активный характер. |
||
|
|
|
|
|
|
|
|
|
|
|
M C |
|
|
|
|
||
|
|
|
|
|
|
|
||
Консервативные силы – силы, при действии которых не происходит поглощение энергии колебаний, т.е. отсутствует демпфирование.
Диссипативные силы – силы, при действии которых происходит поглощение энергии колебаний, т.е. происходит демпфирование (внутреннее вязкое трение).
M − Mc = J dω |
+ ωdJ |
|
dt |
dt |
|
MВТ = βВТ(ω1 − ω2 ) |
момент вязкого трения |
|
Присутствие диссипативных сил приводит к дополнительным затратам энергии, необходимо учитывать эти потери.
Реактивные моменты создаются силами трения (сухое и вязкое трение), силами резания, силами, возникающими при деформации неупругих тел. Реактивные моменты всегда препятствуют движению, как следствие всегда являются тормозящими. При изменении знака скорости они изменяют свое направление. В общем случае они зависят от скорости.
MСР = MС (ω) sign (ω)
Активные или потенциальные моменты создаются силами тяжести, деформацией упругих тел. При увеличении запаса потенциальной энергии активный момент является тормозящим. Знаки момента и угловой скорости различны. (подъем груза). При уменьшении потенциальной энергии активный момент является движущим. Знаки момента и угловой скорости одинаковы. За положительное направление движения принимается обычно требуемое движение привода.
Важнейшей характеристикой является механическая характеристика
(МХ) рабочей машины : ω(M). Механическая характеристика рабочей машины показывает, как изменяется статический момент при изменении скорости рабочей машины.
Классификация механических характеристик :
MС (ω) = M0 |
|
ω |
q |
На практике значением |
M0 |
+ (Mн − M0 ) |
|
|
|||
|
|
ωн |
|
можно пренебречь. |
|

|
ω q |
|
MC (ω) ≈ Mн |
|
|
|
||
|
ωн |
|
|
|
ω |
|
|
|
|
q=1 |
|
Жесткость |
β = dM |
механической |
||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωн |
|
|
|
|
|
|
|
|
|
характеристики |
dω . При β = 0 |
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
характеристика абсолютно мягкая, при |
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
β =1 |
характеристика |
абсолютно |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
твердая. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 |
|
|
|
MCн |
MC |
|
|
|
|||
− |
|
M = β(ω0 −ω) − статическая механическая характеристика. |
|||||||||||
βω0 |
dMС |
− |
Момент трогания, величина управляемая. |
|
|||||||||
βС = |
|
|
|
|
|
|
|
||||||
dω |
− |
Жесткость рабочей характеристики. |
|
||||||||||
|
|
|
|
|
|||||||||
− |
|
MС = M0 +βСω, для мощных приводов можно пренебречь M0 . |
|||||||||||
Классификация статических моментов : 1. Вязкая нагрузка.
Тяговые механизмы. Pс = const .
2. Крановая нагрузка.
Mс = const
q=-1 |
ω |
|
MC |
q=0 |
ω |
MC
3. Фрикционная нагрузка.