

TEP / lekcher_1
.1.pdfКОНСПЕКТ лекций по дисциплине «Теория электропривода»
Старший преподаватель кафедры «Электропривод и автоматизация промышленных установок»
ГУВПО «Белорусско-Росийский университет »Слука М.П.
Часть 1.1 2011 г.
Содержание :
1. |
Вводная часть.............................. |
4 |
1.1.Общие понятия об электроприводе и теории
|
электропривода. Структура электропривода... |
4 |
||
1.2. |
История |
развития |
электропривода. |
|
|
Содержание, |
методология |
и структура курса |
|
|
"Теория электропривода".................... |
|
4 |
|
2. |
Механическая часть электропривода.......... |
|
||
2.1.Структура механической части электропривода
2.2.Механические звенья электропривода, их характеристики.............................
2.3.Передаточные механизмы, их характеристики..
3. |
Силы |
и |
моменты , |
|
действующие |
в |
3.1. |
электроприводе |
............................. силы |
и |
моменты, |
их |
|
Статические |
||||||
|
представление.............................. |
|
|
|
|
|
3.2.Механические характеристики рабочих машин..
3.3.Консервативные и диссипативные силы и моменты....................................
4.Основное уравнение движения электропривода.
4.1.Уравнение Лагранжа 2-го рода и его применение для составления уравнений движения электропривода....................
4.2.Применение уравнения Лагранжа 2-го рода для одномассовой механической системы..........
4.3.Динамические моменты электропривода и их
влияние на движение электропривода.........
5. Приведение моментов к расчетной скорости...
5.1.Приведение статических моментов
5.2.Приведение моментов инерции................
5.3.Учет потерь в передачах................................
6.Расчетные механические схемы...............
6.1.Понятие дискретного инерционного элемента и упругой связи..............................
6.2.Метод последовательного упрощения расчетных схем.......................................
6.3.Эквивалентные расчетные схемы..............
7.Уравнение движения многомассовой системы электропривода.............................
7.1.Уравнение движения трехмассовой консервативной системы.....................
7.2.Уравнение движения двухмассовой системы....
7.3. Структурная схема двухмассовой
диссипативной и консервативной системы.....
7.4.Учет характера статических моментов при составлении структурных схем механической
8. |
части электропривода....................... |
электропривода |
как |
|
Механическая |
часть |
|||
|
объект управления.......................... |
|
|
|
8.1.Динамические свойства одномассовой системы. Её частотные характеристики................
8.2.Динамические свойства двухмассовой консервативной системы при обработке задающего воздействия......................
8.3.Динамические свойства двухмассовой консервативной системы при входном возмущающем воздействии....................
8.4.Условия пренебрежения упругими связями.....
8.5.Динамические свойства двухмассовой диссипативной системы. Оценка демпфирования
колебаний за счет внутреннего вязкого
трения.....................................
9.Механические переходные процессы в одномассовой системе электропривода........
9.1.Механические ПП при разгоне и торможении с реактивной нагрузкой.......................
9.2.Механические ПП при разгоне и торможении с активной (потенциальной) нагрузкой.........
9.3.Механические ПП при переменном моменте инерции и зависимости моментов в функции времени....................................
9.4.Определение оптимального передаточного отношения..................................
10.Механические переходные процессы в двухмассовой системе электропривода........
10.1.Механические ПП в двухмассовой консервативной системе без зазора..........
10.2. Механические ПП в двухмассовой
диссипативной системе без зазора...........
10.3.Механические ПП в двухмассовой консервативной системе с зазором...........
11.Динамические нагрузки в системе электропривода.............................
11.1.Динамические нагрузки в одномассовой системе, в том числе с зазором.............
11.2.Динамические нагрузки в двухмассовой
консервативной системе при постоянном избыточном моменте.........................
11.3. Динамические нагрузки в двухмассовой
|
системе |
при |
управлении |
электромагнитным |
|
11.4. |
моментом................................... |
|
нагрузки |
в |
двухмассовой |
Динамические |
|||||
|
системе |
при |
управлении |
скоростью |
|
11.5. |
двигателя.................................. |
|
нагрузки |
в |
двухмассовой |
Динамические |
|||||
|
системе при выборе зазоров в передачах..... |
||||

1.Вводная часть.
1.1.Общие понятия об электроприводе и теории электропривода. Структура электропривода.
1.2.История развития электропривода. Содержание, методология
иструктура курса "Теория электропривода".
Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, для приведения в движение исполнительных устройств.
Цель ЭП – выполнить все требования рабочей машины. Мы должны обеспечить выполнение заданного режима работы рабочей машины, технологического процесса наилучшим образом, с минимальными потерями, с заданным качеством регулирования.
Автоматизированный ЭП состоит из энергетического и информационного канала. Источником энергии является электрическая сеть. Включает :
− |
Энергетический преобразователь |
|
|
оператор |
|||||
|
энергии; |
f |
|
|
|
r |
Z |
||
− |
Электромеханический |
|
|
|
ИК |
|
|
|
|
|
|
|
|
|
|
||||
|
преобразователь энергии; |
f |
|
|
|
U |
X |
||
|
|
|
|
||||||
− |
Передаточное устройство; |
сеть |
|
|
|
|
|
|
РМ |
|
|
|
ЭК |
|
|
||||
− |
Рабочий орган. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
ИК предназначен для реализации заданного алгоритма управления электроприводом. АЭП работает по заданному циклу.
X |
– |
сигнал обратной связи; |
U |
– |
сигнал управления; |
f |
– |
возмущение. |
Энергетический канал ЭП
сеть
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
↑↓ |
− |
энергия |
|
|
|
|
|
|
|
|
|
|
ЭПЭ |
|
|
|
накапливается |
или |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
отдается, |
|
циркулирует |
||||||
|
↑↓ ∑CU |
dU |
|
|
|
|
|
|||||||||||||
|
|
|
эл.мощность |
внутри. |
|
|
|
|||||||||||||
∑U1I1 |
dt |
|
|
|
|
|||||||||||||||
|
↑↓ ∑LI |
dI |
|
|
|
|
∑U2I2 |
∑U1I1 |
− |
первичная |
||||||||||
|
|
dt |
|
|
|
|||||||||||||||
|
|
|
|
|
||||||||||||||||
|
|
↑↓ ∑Jωdω |
|
|
|
энергия |
электрического |
|||||||||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
преобразователя энергии. |
||||||
|
|
|
|
|
|
Pэ |
|
|
ЭПЭ используется |
для |
||||||||||
|
|
|
|
|
|
|
|
преобразования |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
первичной |
энергии |
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нужную нам энергию. |
|
||

Классификация ЭПЭ :
1.Электромашинные преобразователи (морально устаревшие).
2.Статические преобразователи :
−преобразователи частоты (циклоинверторы и т.д.);
−управляемые выпрямители;
−ШИП, релейные импульсные преобразователи.
сеть
|
|
|
|
|
|
|
|
ЭПЭ |
|
|
|
|
|
ЭМПЭ |
|
|
|
|
|
|
|
|
|
|
МЧ |
|
||||||
|
↑↓ ∑CU |
dU |
|
эл.мощность |
|
|
|
|
|
|
|
мех.мощность |
|
↑↓ |
∑Jωdω |
|
||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
∑U1I1 |
|
|
|
|
|
|
|
∑U2I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
Mр.о.ωр.о. |
||||||
|
↑↓ ∑LI dI |
↑↓ ∑LI |
dI |
|
M ω |
|
↑↓ ∑MV dV |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
dt |
|
Fр.о.Vр.о. |
|||
|
|
↑↓ ∑Jω |
dω |
|
F V |
↑↓ |
∑ |
C |
ω |
∫ |
ωdt |
|||||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
123 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|||||
|
|
|
|
|
|
P |
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
PM |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
э |
|
|
|
|
|
|
эм |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Под электромеханическим преобразователем энергии понимается некоторый многополюсник, на вход которого поступает электрическая мощность, а с выхода снимается механическая мощность.
р.о. – рабочий орган; P – потери.
Целью ЭП является выполнение полезной работы ( Mр.о.ωр.о. ,
Fр.о.Vр.о.), с минимальными потерями.
Действующие на систему возмущения :
−параметрические;
−координатные (силы, вращающие моменты, интенсивность электростатических полей, мех. силы, климатические факторы.
Автоматизированный ЭП дает преимущества :
1.Экономия рабочей силы;
2.Экономия материалов;
3.Улучшение использования производственного электрооборудования;
4.Проверка качества продукции;
5.Повышение надежности выпускаемых устройств;
6.Реализация процессов, неосуществимых при ручном управлении.
Долгосрочные задачи ЭП :
1.Реализация высоких КПД;
1.1.Правильный выбор способов реализации регулируемых координат;
1.2.Реализация экономичных способов пуска и торможения электроприводов.
2.Расширение диапазона регулирования регуляторов (скорости, момента), обеспечение заданного качества регулирования на основе

построения методов оптимальных систем, адаптивных регуляторов, применения микропроцессорного управления;
3.Повышение максимально допустимых ускорений позиционных и следящих ЭП;
4.Повышение надежности и безопасности эксплуатации;
5.Повышение помехозащищенности;
6.Изготовление мощных специализированных ЭП на базе линейных ЭП;
7.Расширение области применения регулируемых ЭП.
ТЭП принято делить на три части :
1.Общая теория электропривода, изучает общие физические закономерности, свойства различных технических реализаций ЭП любого назначения и содержит общие технические рекомендации к использованию;
2.Теория раздельных систем ЭП;
3.Специальные ЭП, различные по их функциональному назначению.
Теорияэлектропривода
|
|
|
|
|
|
|
Механика электропривода |
|
Свойства электромехани- |
||||
|
ческих преобразователей |
|||||
|
|
|
|
|||
|
|
|
|
|
|
|
Разомкнутая электроме-
ханическая система как объект управления
|
|
|
|
|
|
|
Частотные характеристи- |
|
Электромеханические |
||||
ки и колебательность |
|
переходные процессы |
||||
|
|
|
|
|
|
|
Регулирование координат ЭП
|
|
|
|
|
|
|
|
|
|
|
Энергетика ЭП |
|
|
Регулирование момента |
|||
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Основы вобора мощности |
|
|
Регулирование скорости |
||||
|
|
|||||||
|
|
ЭП |
|
|
|
|
||
|
|
|
||||||
|
|
|
|
|
|
|
Регулирование положения |
|
|
|
|
|
|
|
|
||
Механика ЭП
Механические звенья ЭП.
Механическая часть ЭП включает в себя все механически связанные между собой движущиеся кинематические массы. Кинематических схем
столько, сколько механизмов. |
|
|
|
|
|
|
|
|
Все системы ЭП условно делят на три группы : |
|
|
|
|
|
|
1. |
Групповой ЭП. |
|
|
|
|
|
|
|
|
ЭП |
|||||
Недостатки : |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а) |
Невозможно управлять технологическими |
|
|
М |
|||
|
процессами каждого рабочего органа; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
Громоздкость кинематической схемы. |
|
|
|
|
|
|
ПУ1 |
|
|
ПУn |
||||
|
|
|
|
||||
|
|
|
|
|
|
|
|
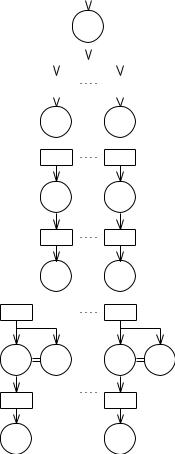
2. Индивидуальный однодвигательный ЭП.
а) Полное управление технологическим процессом;
б) Выполнение любых алгоритмов работы; в) Простота реализации; г) Модульность конструкций приводов.
3. Индивидуальный многодвигательный ЭП.
РО1 |
РОn |
ЭП1 |
ЭПn |
М1 |
Мn |
ПУ1 |
ПУn |
РО1 |
РОn |
ЭП1 |
ЭПn |
М1 М2 |
Мn Мm |
ПУ1 |
ПУn |
РО1 |
РОn |
Преобразовательное устройство (ПУ) предназначено для преобразования входных координат в необходимые выходные координаты (для преобразования вращательного движения вала двигателя во вращательное движение механизма, для преобразования вращательного движения в поступательное и наоборот).
Вращательное движение :
а) Редукторы (планарные, червячные, зубчатые). Предназначены для сообщения ведомому звену вращения, как правило, в ЭП с меньшей постоянной угловой скоростью (редукцией) они выполняют функцию усилителя мощности.
б) Коробки скоростей (очень редко). Для ступенчатого изменения скорости вращения исполнительного механизма.
в) Вариаторы (цепные и фрикционные, свойствами вариаторов обладают специальные электромагнитные муфты : индукционные). Для бесступенчатого изменения скорости вращения выходного вала.
г) Механизмы для движения с остановками (обеспечивают прерывистое движение выходного вала исполнительного механизма при непрерывном вращении вала двигателя).
д) Суммирующие преобразовательные устройства и механические дифференциалы. Используются для получения большего диапазона регулирования (100000).
Поступательное движение :
а) Механизмы для сообщения поступательного и возвратнопоступательного движения с постоянной скоростью (следует относить передачи гайка-винт, зубчато-реечная передача, передача на основе зубчатых ремней, тросов, лент взаимодействующих с барабаном и т.п.).
б) Кривошипно-шатунные, кулисные, 4-х шарнирные передачи для сообщения возвратно-поступательного движения, или передачи движения ведомому звену, в этом случае скорость звена будет неравномерна (насос-качалка для нефти, компрессоры).
Как известно, механизмы состоят из жестких и упругих или гибких звеньев, сочлененных между собой в единую кинематическую схему. В движении каждое из этих звеньев обладает определенной кинетической энергией, зависящей от его массы или момента инерции, и скорости движения данного звена. Упругие звенья, кроме того, способны аккумулировать потенциальную энергию, величина которой зависит от коэффициента жесткости, величины деформации упругого элемента.
При деформации реальных упругих элементов всегда имеет место рассеяние (диссипация) механической энергии, обусловленной силами вязкого внутреннего трения. Реально, энергия диссипации примерно равна коэффициенту вязкого внутреннего трения и разности скоростей на входе и выходе реального упругого звена.
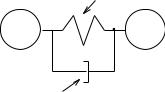
При анализе механической части ЭП реальный механизм заменяют эквивалентной динамической схемой (но эта схема должна иметь свойства идентичные реальной схеме) состоящей из дискретных (сосредоточенных) инерционных элементов, соединенных между собой упругими связями.
− Диссипативная система.
J1 и J2 – сосредоточенные массы.
J1
элемент диссипации
Под дискретным инерционным элементом понимают тело, обладающее свойствами инерции, податливостью которого можно пренебречь.
Податливость – показатель обратный жесткости.
Под упругой связью понимается упругое звено, массой которого пренебрегают. Т.е. имеются ввиду так называемые невесомые упругие связи,

характеризующиеся постоянным коэффициентом жесткости и линейной восстанавливающей силой. Они подчиняются закону Гука.
Определение параметров таких дискретных элементов механической части базируется на знании параметров реальных звеньев.
Параметры.
Важно понимать, что движение механической части должно описываться вектором состояния системы. Вектор состояния отображается координатной системой.
Характеристикой механического вращательного движения является угловая скорость ω(t). При поступательном движении линейная скорость V(t). Т.к. ЭП работает в динамике, то скорость все время изменяется под действием либо управляющих, либо возмущающих воздействий. Зная зависимость ω(t) можно определить перемещение :
α = ∫ωdt = ϕ
Можно определить ускорение и рывок :
|
ω |
d2ω |
ω′ = |
d |
ω′′ = dt2 |
dt , |
В пространстве 3-х координат можно отобразить движение механической части через координаты привода. Можно обозначить оси так :
1. |
ω(ϑ) |
– |
Скорость; |
2. |
ϕ |
– |
Перемещение; |
3. |
ω′ |
– |
Ускорение. |
Движение механической части в области системы координат ограничено, т.к. все координаты ограничены.
ω |
Как |
правило |
в |
|
современном |
||
|
электроприводе |
|
|
|
ускорение |
||
ωmax |
ограничивается |
|
чаще |
всего |
|||
|
динамическими возможностями машины |
||||||
|
(наиболее |
выражено |
у |
машин |
|||
|
постоянного тока с коллектором). |
||||||
|
Ускорение |
задается |
|
требованиями |
|||
ϕ |
max |
ϕ рабочей машины. |
ω′ ω′max |
|
|
|
|
|
Вектор состояния |
|
|
системы |
|
|
Связь между механической и электрической частями системы осуществляется через электромагнитный момент. Один канал управления (другого нет).
Если перемещение рабочего органа не ограничено то фазовое пространство превращается в фазовую плоскость, в которой должна быть