

TEP / lekcher_1
.1.pdfПри деформации диссипативного упругого звена также запасается потенциальная энергия, в соответствии с (1), действует восстанавливающая или упругая сила (2), кроме того, часть подводимой к механической части энергии теряется в виде тепла (эта энергия определяется диссипативной функцией Релея).
Вращательное движение : |
Wдис = |
β Δω2 |
(3) |
|
12 |
|
|||
|
|
2 |
|
|
Поступательное движение : |
Wдис = |
βgΔϑ2 |
|
|
2 |
|
|
||
|
|
|
|
|
При этом создается диссипативный момент, а при поступательном движении
– диссипативная сила.
Вращательное движение : |
Mдис =β12Δω |
(4) |
Поступательное движение : |
Fдис =βgΔϑ |
|
Разность скоростей вращения или движения массы на Где − входе и выходе упругого звена.
Мы рассматриваем в ЭП приведенные расчетные схемы, они приводятся к вращательному, либо к поступательному движению. Обычно приводятся к одной скорости или к одному валу. Причем расчетные параметры можно приводить к любому заранее выбранному месту кинематической схемы механизма. Т.е. к любому упругому элементу или к любой скорости, или к любому валу. Если приведение производится к валу механизма, то приведенная расчетная схема вращательной системы, в которой все массы вращаются с некоторой одной скоростью вокруг общей геометрической оси со средней скоростью значение скорости всегда различно в динамике. В такой системе нагрузки характеризуются крутящими моментами.
Инерционные элементы характеризуются моментами инерции, приведенными к расчетной скорости, а так же упругие связи характеризуются коэффициентами жесткости, приведенными к расчетной скорости.
Если приведение осуществляется к какому-либо поступательно движущемуся элементу, результат расчетная схема поступательного движения (нагрузка характеризуется силами, инерционные элементы характеризуются массами, упругие элементы коэффициентами жесткости).
Приведение момента инерции дискретного инерционного элемента выполняется исходя из равенства кинетической энергии приводимого и приведенного элемента.
Приведение моментов и сил из равенства соответствующих средних работ, т.е. мощности, а приведение коэффициентов жесткости из условия равенства потенциальных энергий.
Условие равенства запаса потенциальной энергии в j-ом упругом приведенном и реальном элементах имеет вид :

|
C |
пр.кр. j |
Δϕ |
пр. j |
2 |
|
C |
кр. j |
Δϕ 2 |
||
|
|
|
= |
|
|
j |
|||||
|
|
|
2 |
|
|
|
|
|
2 |
|
(5) |
|
|
приведенный |
|
|
|
реальный |
|
|
|||
Где |
Δϕпр. j |
= Δϕj ij |
|
|
|
|
|
||||
|
|
= Скр. j |
|
|
|
|
|
|
|
||
|
Cпр.кр. j |
2 |
|
|
|
(6) |
|||||
|
|
|
|
|
ij |
|
|
|
|
|
|
ij - передаточное отношение между валом j-тым и валом, к которому мы приводим.
Аналогично при приведении поступательно движущихся элементов к вращательному движению необходимо сохранить условие баланса потенциальной энергии.
C |
пр.кр. j |
Δϕ |
пр. j |
2 |
|
C |
g _ j |
x |
2 |
|
|
|
|
= |
|
j |
|
(7) |
|||
|
|
2 |
|
|
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|
Считая, что линейная часть движется линейно, относительное перемещение
x , поворот ротора машины |
ϕ, учитывая соотношение скоростей через |
|||||
радиус приведения ρ |
получаем : |
|
||||
Δϕ |
пр. |
= |
x |
ρ |
|
|
|
|
|
|
|
||
Cкр.пр. = Cg ρg |
2 |
(8) |
||||
При составлении расчетной схемы обычно стараются выделить главные массы и главные упругие связи. При этом исходят из условия, что динамические свойства механической части ЭП определяются главным образом наименьшими частотами (в области среза). Если система имеет очень высокий порядок, то малые постоянные времени можно рассматривать как некоторые запаздывания в системе. В связи с этим имеется возможность упрощения эквивалентных расчетных схем путем уменьшения числа дискретных инерционных элементов и упругих связей.
Рассмотрим метод последовательных упрощений :
|
Рассмотрим реальную систему (машина – |
|
вал – муфта – редуктор - …) после |
|
приведения к расчетной скорости вала |
|
машины получаем большое количество |
|
масс, соединенных между собой упругими |
|
элементами. Пусть нам надо убрать все и |
|
оставить две массы (одна масса заделана |
заделана |
т.к. она не влияет на динамику). |

Метод последовательного приведения (упрощения). Во всякой механической системе (приведенной к расчетной скорости) можно выделить характерные звенья двух типов :
1.звено типа А, где дискретный инерционный элемент имеет место с двухсторонними упругими связями;
2.звено типа Б, состоящее из двух дискретных инерционных элементов с одной общей упругой связью.
Тип А (рисунок 4) |
|
Тип Б (рисунок 5) |
|
||
Jj−1 |
Jj |
Jj+1 |
Jj |
J j+1 |
|
|
Cj−1, j |
Cj, j+1 |
Cj−1, j |
Cj, j+1 |
Cj+1, j+2 |
Замена звена типа А на звено типа Б |
Замена звена типа Б на звено типа А |
||||||||||||||||||||||
|
|
|
|
|
J ja |
|
|
Jjб |
|
|
|
|
|
|
Jj+1б |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
a |
|
|
a |
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Cj−1, j |
|
|
Cj,j+1 |
|
|
|
|
|
|
|
|
|
Cj,j+1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J1jб |
|
|
|
|
|
|
J2 jб |
|
|
|
|
|
Jja |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
C |
б |
|
|
|
|
|
Cj−1, j |
|
Cj1 |
|
|
Cj2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
12 j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
14243 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С − суммарный |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
J − суммарный |
|
|
|
|
|||||||||||||||
При замене звена типа А на звено типа Б необходимо применять формулы пересчета (для упругих звеньев) :
С12 jб = Сj−1, ja + Сj, j+1a
Для динамических звеньев (масс) :
|
|
|
|
a |
J |
б = J |
а ej, j+1 |
||
1j |
j |
|
e |
б |
|
|
|
12 j |
|
|
|
|
|
|
a |
J |
|
б = J |
а ej−1, j |
||
|
2 j |
j |
|
e |
б |
|
|
|
|
12 j |
|
Если приводим к поступательно движущимся массам :
|
|
a |
|
|
|
a |
m |
б = m a |
ej, j+1 |
m |
|
б = m a |
ej−1, j |
1j |
j |
e б |
|
2 j |
j |
e б |
|
|
12 j |
|
|
|
12 j |
(9)
(10)
(10а)
При замене звена типа Б на звено типа А необходимы преобразования :
Jja = Jjб + Jj+1б |
(11) |
mja = mjб + mj+1б |
(11а) |

Податливости : |
Jб |
|
|
Jб |
|
|
|
|
|
|
|
||
ea |
= eб |
j+1 |
ea |
= eб |
j |
(12) |
|
|
|||||
j1 |
j, j+1 Jaj |
j2 |
j, j+1 Jaj |
|
||
ej = 1Cj
После преобразования схемы с парциальными звеньями результирующие моменты инерции :
J = J |
j−1 |
+ Jб |
J |
2 |
= J |
j+1 |
+ Jб |
(13) |
1 |
1j |
|
|
2 j |
|
Для соединенных последовательно жестких связей :
e = e |
j−1, j |
+ ea |
e |
2 |
= e |
j+1, j+2 |
+ ea |
(14) |
1 |
j1 |
|
|
j2 |
|
Применяя последовательно рассмотренный метод для исходной расчетной схемы, получаем упрощение схемы. При данном упрощении дополнительно следует принимать во внимание :
1.Если парциальное звено является краевым, то при преобразовании Б к А остается, так называемый, “свободный” упругий участок, имеющий
жесткость C1, если находится слева, и C2 , если справа. Но жесткости – невесомые связи, следовательно, они не влияют на динамику и их можно отбросить.
2.При преобразовании из А в Б одна из масс преобразованной системы сливается с заделкой, её исключают из рассмотрения (режим стопорения или работа на упор).
3.При преобразовании звеньев типа А на практике имеет место случаи, когда жесткость одной из упругих связей как минимум на порядок
больше жесткости другой. Например :
Caj, j−1 Caj, j+1 |
eaj, j−1 |
eaj, j+1 |
|
в соответствии с (9) и (10) : |
eб |
≈ eб |
|
12 j |
|
j, j+1 |
|
Моменты инерции : |
Jб2 j ≈ 0 |
|
|
Jбj1 ≈ Jaj1 |
|
||
Т.е. рассматривается инерционность, присоединенная к инерционности с той стороны, жесткость которой велика.
При рассмотрении задач ЭП применяют три типа расчетных схем :
1.Одномассовая;
2.Двухмассовая;
3.Трехмассовая расчетная диссипативная или консервативная схема. Если система представляет распределенные массы, то описание системы производится в частных производных. Достаточно рассмотреть дискретные схемы в инженерных задачах.

1.Одномассовая расчетная схема (т.е. в результате надо получить какуюто эквивалентную массу, приведенную к валу рабочей машины).
M |
|
|
|
(Mпр) |
|
|
|
|
Mc |
ω |
|
|
J |
|
|
|
|
||
пр |
равны |
|
|
|
|
|
|
|
|
ωдв |
С |
кр |
→ ∞ |
|
|
|
|
|
|
J
 ω
ω
 M
M
Mc 
Очевидно, такой вариант, когда жесткие упругие связи обладают очень большой жесткостью
( Скр → ∞), т.е. связи абсолютно жесткие.
J = const M − Mc
J ≠ const |
|
|
|
J = f (t) |
|
J ≠ const |
|
|
|
J = f (ϕ) |
|
M − Mc
M − Mc
=J ddtω
=J ddtω + ω2 dJdt
=J dω + ω2 dJ dt 2 dϕ
2.Двухмассовая консервативная и двухмассовая диссипативная системы. Двухмассовая консервативная система :
|
|
Mуп |
т.к. две массы |
|
Есть две степени свободы (равно |
|||||
J1 |
|
M12 |
J2 |
|
|
|
количеству связей + 1). |
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Мгновенные |
значения |
скоростей |
|
|
|
|
|
|
|
|
|
|||
ω1 |
|
|
|
|
|
|
элементов не равны между собой в |
|||
C12 |
|
|
ω |
2 |
|
динамике. |
|
|
||
M |
|
|
|
|
Средние значения скоростей должны |
|||||
|
|
|
|
|
||||||
Mc1 |
|
M c 2 |
|
|
|
|
быть равны. |
|
|
|
−M12 |
+ M − Mc1 = J1 |
dω1 |
|
|
|
|
||||
dt |
|
|
|
|
||||||
|
|
|
dω2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
M12 − Mc2 = J2 |
|
|
|
|
|
|
|
|||
dt |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
M |
= C Δϕ = C |
(ω −ω )dt |
|
|
||||||
12 |
|
12 |
12 ∫ |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двухмассовая диссипативная система :
|
|
|
|
β12 |
|
|
|
|
|
Часть передаваемой через упругое звено |
|||||||
|
|
|
|
|
|
|
|
|
мощности |
|
теряется в |
виде тепла. |
|||||
|
J1 |
|
|
|
|
|
|
|
J2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
Диссипация |
сопутствует |
гашению |
||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
автоколебаний. |
|
||
|
|
ω1 |
C12 |
|
|
|
ω |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
M |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mc1 |
|
|
|
|
M c 2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
dω1 |
|
|
|
|
|||||||||||
|
M − Mc1 |
− M12 |
= J1 |
|
|
|
|||||||||||
|
dt |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
dω2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
M12 − Mc2 = J2 |
|
|
|
|
|
|
|
|||||||||
|
dt |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
M12 = C12 ∫(ω1 −ω2 )dt +β12 (ω1 −ω2 ) |
|
|
|
|||||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Система подчиненного регулирования не годится для двухмассовой системы).
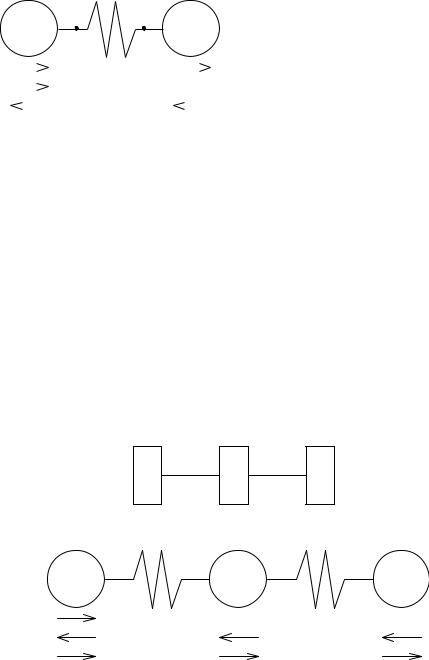
3.Трехмассовая консервативная система. Неразветвленная (антенная) система :
|
J1 |
J2 |
|
J3 |
|
|
|
|
C12 |
C23 |
|
|
|
|
C12 |
|
|
C23 |
|
|
|
|
|
|
|||
|
J1 |
J2 |
|
|
J3 |
|
Mc1 |
M |
M c 2 |
|
Mc3 |
|
|
ω1 |
ω2 |
ω3 |
||||
|
|
|
Расчетная схема состоит из многих масс (3 массы).
n |
J j |
|
ωдв |
||
J1 = Jрот + ∑ |
ii = |
||||
2 |
ω |
||||
i=1 |
i |
i |
|
||
|
|
|
i |
||

Запишем уравнения 3-го порядка в форме Коши : |
|
|
|
|
|
|||||||||||||||||||||
M − Mc1 − M12 |
= J1 |
dω1 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dω2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M12 − Mc2 − M23 = J2 dt |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dω3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M23 − Mc3 = J3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(ω −ω )dt |
|
|
|
|
|
|
||||||
M = C Δϕ = C |
|
|
∫ |
|
|
|
|
|
|
|||||||||||||||||
12 |
12 |
12 |
|
12 |
|
|
|
1 |
2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
M |
|
= C |
|
Δϕ |
|
|
= C |
|
|
|
∫ |
( |
ω −ω )dt |
|
|
|
|
|
||||||||
|
|
23 |
|
|
23 |
|
|
23 |
|
|
23 |
|
|
2 |
3 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разветвленные трехмассовые схемы : |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
ряде |
случаев |
необходимо |
|||
|
|
|
|
|
|
|
C12 |
|
|
|
|
|
|
|
|
|
|
рассматривать |
разветвленные |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схемы, которые лучше подходят для |
||||||
|
|
J1 |
|
|
|
|
|
|
|
|
|
|
J3 |
|
точного |
рассмотрения |
динамики |
|||||||||
|
|
|
|
M1 |
|
|
|
|
|
|
|
|
M |
|
|
реальных механизмов. |
|
|
||||||||
|
|
|
|
|
C23 |
|
|
|
|
c |
|
НАПРИМЕР |
: |
Рабочий |
орган, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
ω |
|||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
состоящий из двух машин. |
Такую |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
две машины |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схему |
можно |
преобразовать и |
||||||
|
|
|
|
J2 |
|
|
|
|
|
|
|
|
|
|
минимизировать, |
но |
потеряется |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
взаимодействие двух машин (для |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
M2 |
|
|
|
|
|
|
|
|
|
такого |
преобразования |
нужны |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
ω2 |
|
|
|
|
|
|
|
|
|
перекрестные связи, чтобы убрать |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
влияние 1-го канала на другой). |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
В результате рассмотренного преобразования реальных кинематических схем мы получаем, так называемые, приведенные расчетные схемы, одномассовые, двухмассовые, трехмассовые консервативные и диссипативные. Это позволяет значительно упростить исследование динамики электропривода, ограничить количество дифференциальных уравнений, описывающих динамику, упростить синтез систем, упростить построение регуляторов.

Уравнение движения многомассовых систем ЭП. Структурные схемы механической части ЭП как объекта управления.
Рассмотрим уравнение движения трехмассовой консервативной
системы (пока не учитываем вид нагрузки, Mc - крановая потенциальная нагрузка).
|
|
|
|
|
|
|
|
|
Средние |
скорости |
|
|
|
|
|
|
|
|
|
|
равны (в динамике − |
||
|
|
|
|
|
|
|
|
|
различны). |
|
При |
|
|
|
C12 |
|
|
C23 |
|
|
вращательном |
|
|
|
|
|
|
|
|
|
движении |
|
|
||
|
J1 |
|
J2 |
|
|
|
обобщенными |
|
|||
|
|
|
J3 |
координатами |
масс |
||||||
|
|
M |
|
|
|
|
|
|
являются |
угловые |
|
Mc1 |
|
M c 2 |
|
|
Mc3 |
|
|
перемещения ( ϕ1 , ϕ2 , |
|||
|
|
|
|
|
|||||||
|
ω1 |
|
ω2 |
|
ω3 |
||||||
|
|
|
|||||||||
|
|
|
|
|
|
ϕ |
угловые |
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
3 ), или |
||
|
|
|
|
|
|
|
|
|
скорости |
( ω1 , |
ω2 , |
|
|
|
|
|
|
|
|
|
ω3 ). |
|
|
Уравнение Лагранжа 2-го рода для n-массовой системы :
d |
|
∂W |
|
∂W |
∂W |
|
|
|
|
k |
− |
k + |
п = Q |
, j =1Kn |
(1) |
|
|||||||
dt |
|
|
|
∂qj |
j |
|
|
|
∂q′j |
|
∂qj |
|
|
В данной схеме 3 инерционных звена и 2 упругих связи.
|
|
|
n |
|
|
J jω2j |
|
J ω2 |
|
J ω2 |
|
J ω2 |
|
|
|
|
||||||
Wk |
= ∑ |
|
|
= |
1 1 |
+ |
2 2 |
|
+ |
|
3 |
3 |
|
, j =1,2,3; |
(2) |
|||||||
2 |
|
2 |
2 |
|
|
2 |
||||||||||||||||
|
|
|
j=1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
n−1 |
Cj, j+1 (ϕj −ϕj+1 )2 |
C |
|
( |
ϕ −ϕ |
)2 |
|
|
|||||||||||
Wп = ∑ |
|
|
|
|
|
|
|
= |
|
12 |
|
1 |
|
2 |
|
+ |
|
|||||
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
||||||||
|
|
|
j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
|||||
|
|
|
(ϕ |
|
|
−ϕ )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
C |
32 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
+ |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для определения внешних обобщенных сил вычислим элементарные работы всех моментов на возможном перемещении.
δA = (M − M |
)δϕ |
|
|
|
1 |
c |
1 |
|
|
δA2 |
= −Mc2δϕ2 |
|
(4) |
|
δA3 |
= −Mc3δϕ3 |
|
|
|
|
|
|
||
Тогда внешние обобщенные силы будут равны :
Q |
= δA1 |
= M − M |
|
|
|
1 |
|
δϕ1 |
|
c1 |
|
|
|
|
|
|
|
Q2 |
= |
δA2 |
= −Mc2 |
|
|
|
(5) |
||||
|
|
δϕ2 |
|
|
|
Q3 |
= |
δA3 = −Mc3 |
|
|
|
|
|
||||
|
|
δϕ3 |
|
|
|
Для определения моментов левой части (1), действующих на j-ый элемент системы продифференцируем (2) и (3), получим инерционный (динамический) момент :
|
|
|
d |
|
∂W |
|
|
∂W |
|
dω |
|
ω2j |
|
dJj |
|
|
M |
дин |
= |
|
|
k |
|
− |
k = J |
j |
|
+ |
|
|
|
(6) |
|
|
|
|
|
|||||||||||||
|
|
dt |
|
∂ωj |
|
|
∂ϕj |
dt |
|
2 |
|
dϕj |
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||
Jj |
= const |
|
|
|
|
dJj |
= 0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
dϕj |
|
|
|
|
|
|
|
|
Инерционные моменты каждой массы :
Mин1 = J1 |
dω |
|
|
dt1 |
|
||
|
|
dω |
|
Mин2 |
= J2 |
|
|
2 |
|
||
|
|
dt |
|
Mин3 |
= J3 |
dω |
|
3 |
|
||
|
|
dt |
|
Потенциальные (упругие) моменты :
Mпj |
= |
∂Wпj |
= −Cj−1, j (ϕj−1 −ϕj )+ Cj, j+1 (ϕj −ϕj+1 ) |
|||||||
∂ϕ |
||||||||||
|
|
|
j |
|
|
|
|
|
|
|
Для каждой связи : |
|
) |
|
|
|
|
||||
M |
п1 |
= −C |
(ϕ −ϕ |
|
|
|
|
|||
|
12 |
1 |
2 |
|
|
|
|
|
||
M = −C (ϕ −ϕ )+ C (ϕ −ϕ ) |
||||||||||
|
п2 |
12 |
1 |
2 |
|
23 |
2 |
3 |
|
|
|
|
|
||||||||
(7)
(8)
(9)
Выражения (6) и (8) позволяют определить моменты для любого количества масс. Согласно (1) для любого j-го звена можно записать уравнение движения :
M |
внj |
− M |
пj |
= M |
|
|
|
|
|
инj |
|
||
внешний |
|
|
|
(10) |
||
Mвнj |
= Qj |
|
|
|
|
|
|
|
|
|
|||
Для трехмассовой консервативной системы дифференциальные уравнения 3- го порядка, описывающие динамику механической схемы :
|
|
|
|
|
|
|
|
|
dω |
|
|
|
|
|
|
|
||
M − Mc1 − M12 = J1 dt1 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
dω |
|
|
|
|
|
|||
M12 |
− Mc2 − M23 = J2 |
|
|
|
|
(11) |
||||||||||||
dt |
2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
dω3 |
|
|
|
|
|
|
|
||||
M23 |
− Mc3 = J3 |
|
|
|
|
|
|
|
|
|
||||||||
dt |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M = C |
|
(ϕ −ϕ |
) |
= C |
|
∫ |
(ω −ω )dt |
|
||||||||||
|
12 |
12 |
1 |
|
2 |
|
|
12 |
|
|
1 |
2 |
|
(12) |
||||
|
|
|
|
(ϕ |
|
−ϕ )= C |
|
|
|
|
|
|
|
|||||
M |
23 |
= C |
23 |
2 |
23 ∫ |
(ω −ω )dt |
|
|||||||||||
|
|
|
|
3 |
|
|
|
2 |
3 |
|
|
|||||||
Для составления структурных схем диф. уравнения преобразовывают по Лапласу при нулевых начальных условиях. Преобразуем (11) по Лапласу :
M(p)− Mc1 (p)− M12 (p)= J1pω1 (p) |
|
||||
M12 (p)− Mc2 |
(p)− M23 (p)= J2pω2 (p) |
||||
M23 (p)− Mc3 (p)= J3pω3 (p) |
|
||||
|
|||||
M12 (p)= |
|
C12 |
|
(ω1 (p)−ω2 (p)) |
|
|
p |
|
|||
|
|
|
|
||
|
|
C23 |
|
|
|
M23 (p)= |
(ω2 (p)−ω3 (p)) |
|
|||
|
|
||||
|
|
p |
|
|
|
|
|
|
|
||
(13)
(14)