

Б5. Банк аналогових інтегральних мікросхем
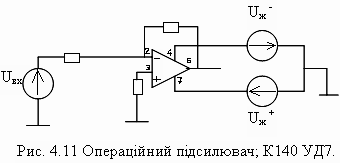
Б5.а. Операційний підсилювач (рис.4.11)
Напруга джерела живлення
Uж+, В +15
Uж-, В -15
Найбільша вихідна напруга /Uвих/m, В 11,5
Мінімально допустимий опір навантаження Rн, кОм 2
Примітка В ОП є внутрішня корекція АЧХ та захист входу і виходу від КЗ.
Б 5.б. Компаратор (Рис.4.12)
Напруга джерела живлення
Uж+, В +12
Uж-, В -6
Вихідна напруга “0” U0вих, В 0,3
Вихідна напруга “1” U1âèõ, В 2,5-4
Допустимий вихідний струм Iвих, mA 1,6
Коефіцієнт підсилення К > 750
Максимально допустима вхідна напруга Uвх, В 6,5
Вхідний опір Rвх, кОм 100

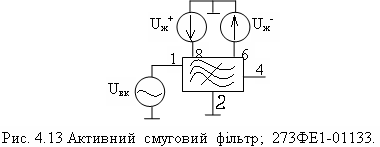
Б 5.в. Активний смуговий фільтр (рис.4.13).
Напруга джерела живлення
Uж+, В +12
Uж-, В -12
Найбільша вихідна напруга Uвих m, В 5
Коефіцієнт підсилення kф 3,16
Частота f, кГц 1,936
Добротність Q 18,3
Мінімально допустимий опір навантаження Rн, кОм 5
Б 5.г. Переривач (ключ) (рис.4.14)
Допустима напруга між емітерами |Uee|, В 30
Опір відкритого ключа Ro, Ом 100

Б 5.д. Резистивна матриця (рис.4.15)
Напруга джерела живлення Uж, В 5-17
Максимально допустима опорна напруга |Uоп|доп ,В 17
Максимальний вихідний сигнал
(при “1” в усіх розрядах) Uвих m, В Uоп(1-2-10)
Примітка: Допускається в якості Uоп також і напруга змінного струму.





Uоп
Uж

14
15

![]()
4
5
6
7
8
9
10
11
12
13
![]()
16
Вихід



До операційного
підсилювача
Qвх
( 10 розр.)

1
Вхід -
2


Вхід +


3
Рис. 4.15. Резистивна
матриця з комутуючими ключами; К 572
ПА 1.
Список літератури
Титце У. Полупроводниковая схемотехника. 12-е изд. Том ІІ / Титце У., Шенк К.; пер. с нем. – М.: ДМК Пресс, 2007. – 942 с.
Ключев В. И., Терехов В. М. Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов. – М.: Энергия, 1980. – 360 с., ил.
Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: Корона-принт, 2001. – 320 с., ил.
Галай М.В. Лінійні неперервні системи автоматичного керування. – Полтава: ПДТУ, 2001.– 140 с.
Валентинов В.Г. Методичні вказівки до курсового проекту з дисципліни «Електропривод та автоматизація загальнопромислових механізмів». – Полтава: ПДТУ, 2001.
Онушко В. В., Шефер О. В., Скрильник О. М. Асинхронні машини: Навчальний посібник. – Полтава: Вид-во ПолтНТУ, 2008. – 183 с.
Синтез позиционных систем программного управления / Под ред. А.А.Вавилов, Л.; Машиностроение (ленинградское отделение), 1977. 280 с.
Алгоритмы и пакет программ проектирования позиционных следящих систем на персональных ЭВМ Е.Л.Львов, Т.В.Ягодкин Под ред. Г.К.Круга.- М.: Изд-во МЭИ, 1994. -78стр..
Ахметжанов А.А., Кочемасов А.В. Следящие системы и регуляторы. М.: Энергоатомиздат, 1986.
Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами.- Л.: Энергоиздат, 1982.
Гитис Э.И., Пискулов Е.А. Аналого-цифровые преобразователи.- М.: Энергоиздат, 1981.
Домрачев В.Г., Матвиевский В.Р., Смирнов Ю.С. Схемотехника цифровых преобразователей перемещений.- М.: Энергоатомиздат, 1986.
Транзисторы для аппаратуры широкого применения /Под ред. Б.Л.Перельмана.- М.: Радио и связь, 1981.
Справочная книга радиолюбителя-конструктора / [А.А. Бокуняев, Н.М. Борисов, Р.Г. Варламов и др.]; под ред. Н.И. Чистякова. – М.: Радио и связь, 1990. – 624 с.
Аналоговые и цифровые интегральные микросхемы /Под ред. С.В.Якубовского.- М.: Радио и связь, 1985.
Клюев А.С. Проектирование систем автоматизации технологических процессов: Справочное пособие / А.С. Клюев, Б.В. Глазов, А.X. Дубровский, А.А. Клюев. – 2-е изд., перераб. и дополненное. – М.: Энергоатомиздат, 1990.
Ефимов И.Е. и др. Микроэлектроника.- М.: Высш. шк., 1987.
Зміст
Вступ…………………….………………………………………………………………………… 2
1. Синтез цифрової частини позиційної слідкуючої системи з цифровим програмним керуванням ……………………………………………………………………………………… 3
1.1 Проектування цифрової частини……………………………………………………… 3
1.2 Вибір типу датчика положення ……………………………………………………….. 4
1.3 Вибір структури зрівняльного пристрою ……………………………………………..4
1.4 Побудова перетворювача цифра-аналог ………………………………………………5
2. Проектування аналогової частини позиційної слідкуючої системи …………………….7
2.1 Навантаження приводу ПССПК ……………………………………………………… 7
2.2 Вибір виконавчого двигуна та редуктора …………………………………………... 8
2.3 Вибір підсилюючих і коригуючих елементів ПССПК ……………………………..9
3. Розрахунок елементів та основних параметрів ПССПК ………………………………... 11
3.1 Завдання до проекту …………………………………………………………………...11
3.2 Попередній вибір двигуна і типу підсилювача потужності ……………………….12
3.3 Вибір двигунів і розрахунок редуктора …………………………………………….. .12
3.3.1 Вибір двигуна постійного струму та розрахунок редуктора ………………...12
3.3.2 Вибір двофазного асинхронного двигуна і розрахунок редуктора ………….14
3.3.3 Розрахунок редуктора …………………………………………………………….. .15
3.4 Розрахунок підсилювача потужності ПСС …………………………………………. .16
3.4.1 Розрахунок трифазного реверсивного тиристорного перетворювача ………...16
Розрахунок реверсивного мостового підсилювача з транзисторами
в ключовому режимі ……………………………………………………………….. 19
Розрахунок двотактного транзисторного підсилювача потужності
з навантаженням на змінному струмі …………………………………………… .25
3.5 Проектування та розрахунок цифрової частини ПСС …………………………….. .27
3.6 Розрахунок параметрів нестабілізованих ПСС …………………………………….…36
Розрахунок параметрів нестабілізованої слідкуючої системи з двигуном
постійного струму в лінійному наближенні …………………………………… .36
3.6.2 Розрахунок параметрів нестабілізованої слідкуючої системи з асинхронним двохфазним двигуном в лінійному наближенні ………………………………..38
Розрахунок параметрів ПСС, стабілізованих жорсткими зворотніми
зв’язками (ЖЗЗ) …………………………………………………………………………...42
Розрахунок параметрів ПСС з двигуном постійного струму,
стабілізовану ЖЗЗ ………………………………………………………………….. 38
Розрахунок параметрів ПСС з асинхронним двофазним двигуном,
стабілізовану ЖЗЗ ………………………………………………………………….. 40
3.8 Розрахунок попереднього підсилювача ПСС ……………………………………….. 43
3.8.1 Попередній підсилювач ПСС із двигуном постійного струму ………………. 43
3.8.2 Попередній підсилювач ПСС із двофазним асинхронним двигуном ………… 45
4. Банк даних виконання проектування та розрахунку ПССПК ………………………. 46
Список літератури……………………………………………………………..……………… 53