

физика механика
.pdfглавы). Наконец, аналогом массы является момент инерции, который представляет собой меру инертности во вращательном движении.
Пример 1. Маховики в двигателях или машинах имеют большие моменты инерции и с трудом разгоняются или
останавливаются, сохраняя «по инерции» свое состояние покоя или равномерного вращения вокруг свободной оси.
Пример 2. Вокруг неподвижных свободных осей вращаются два тела одинаковых массы m и радиуса R: кольцо и сплошной диск. У какого из тел больше момент инерции. Ответ: у кольца, так в соответствии с формулой (2.38) масса его тела распределена дальше от оси вращения.
Пример 3. Вычислить момент инерции однородного тонкого
|
|
Z |
|
|
|
длинного18 |
|
стержня |
|||
|
|
|
|
|
массы m и длины L |
||||||
|
|
|
|
|
|
||||||
|
|
|
площадь поперечного |
относительно |
|
оси, |
|||||
элемент длины dy |
сечения |
Y |
2 |
проходящей |
через |
его |
|||||
|
|
|
|
||||||||
|
|
. |
|
|
|
центр инерции. |
|
||||
|
|
|
|
Y |
Расположим стержень |
||||||
-L/2 |
|
O |
L/2 |
|
вдоль оси OY (см. рис.). |
||||||
X |
|
|
|
|
|
|
|
Воспользуемся |
|||
К вычислению момента инерции тонкого |
формулой |
|
(2.39). |
||||||||
длинного стержня относиительно оси, |
Элемент |
|
массы: |
||||||||
проходящей через |
его центр масс |
dm = ρdV = ρY 2dy |
|||||||||
|
|
|
|
|
|
( ρ − |
|
|
|
плотность |
|
стержня). Тогда момент инерции JC стержня относительно оси, |
|||||||||||
проходящей через его центр масс (относительно оси OZ): |
|
||||||||||
|
|
L 2 |
|
L 2 |
|
3 L 2 |
|
3 |
|
||
(2.40) |
JC = |
∫ y2dm = ρY 2 |
|
∫ y2dy =ρY 2 y |
|
|
= |
ρY 2 L |
= |
||
|
|
−L 2 |
|
−L 2 |
3 |
−L 2 |
|
12 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
= ρY 2L L2 = m L2 .
12 12
Момент инерции данного тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от
18Длина такого стержня много больше его ширины и высоты
-51 -

положения тела по отношению к этой оси, то есть от распределения массы относительно оси вращения. Согласно теореме Штейнера (теореме о переносе осей инерции) момент инерции тела J относительно произвольной неподвижной оси равен сумме момента инерции этого тела JC относительно оси,
проходящей через центр инерции тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
(2.41) J = JC + md 2 .
Моменты инерции однородных тел простейшей формы относительно осей, проходящих через их центры масс приведены в следующей таблице:
Наименование тела |
Момент |
|||
|
инерции |
|||
полый тонкостенный цилиндр радиуса R, массы m |
|
mR2 |
||
сплошной цилиндр (диск) радиуса R, массы m |
1 |
2 |
mR2 |
|
|
|
|
||
сплошной шар радиуса R, массы m |
2 |
5 |
mR2 |
|
|
|
|
||
тонкостенная сфера радиуса R, массы m |
2 |
|
3 |
mR2 |
|
|
|
|
|
прямой тонкий стержень длины L, массы m |
112 mL2 |
|||
тонкая пластина со стороной L, массы m |
1 |
6 |
mL2 |
|
|
|
|
|
|
куб со стороной L, массы m |
1 |
|
4 |
mL2 |
|
|
|
|
|
В предыдущих параграфах данной главы были сформулированы законы динамики поступательного и вращательного движений. Подведем итоги: основные количественные соотношения устанавливаются вторым законом Ньютона; первый закон позволяет выделить инерциальные системы, к которым можно применять второй закон; с помощью третьего закона можно перейти от динамики материальной точки и динамике поступательно и вращательного движений тела.
***** Глава2. §6 *****
- 52 -
§7. Статика как частный случай динамики. Характер равновесия тел
● Статика
Раздел динамики, в которой изучаются условия равновесия тел.
Как мы уже установили, действии силы приводит к появлению ускорения, а момента сил – к появлению углового ускорения у тел.
● Равновесие тела
Такое его положение, которое сохраняется без каких-либо дополнительных воздействий. Значит, неподвижное тело в положении равновесия должно оставаться достаточно долго без воздействий извне.
В соответствии с основными уравнениями динамики поступательного и вращательного движений покоящееся тело не
начнет двигаться поступательно, если главный вектор F внешн внешних сил, действующих на него, равен нулю. Аналогично, неподвижное тело не будет вращаться, если главный момент M внешн внешних сил (относительно каких-либо точек или осей), действующих на тело, равен нулю. Таким образом, необходимое и достаточное условия равновесия покоящегося тела описывается системой двух уравнений:
(2.42) |
Frвнешн = 0, |
||
|
r |
внешн |
|
|
M |
= 0. |
|
(2.43) |
|
||
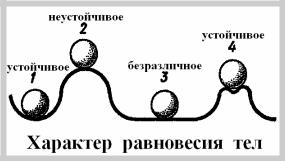
Однако, в реальных условиях надо уметь еще оценить характер равновесия. Для этого надо немного (в пределе – бесконечно мало) вывести тело из равновесия. При этом, возможно, появятся силы или моменты сил, и условия равновесия будут нарушены. Если
возникшие силы или моменты сил возвращают тело к положению равновесия, то это равновесие устойчиво; если уводят дальше – равновесие неустойчиво; если, наконец, главные векторы внешних сил и моментов остаются равными нулю – равновесие
безразличное.
- 53 -

Из приведенного рисунка видно, что устойчивое равновесие связано с минимумом потенциальной энергии рассматриваемого тела по отношению ко всем близким соседним положениям этого тела. Неустойчивое равновесие отвечает максимуму потенциальной энергии по отношению к таким же положениям. Безразличное равновесие связано с неизменной потенциальной энергией всех близких состояний.
Тело на горизонтальной плоскости находится в равновесии, если вертикальная проекция центра тяжести располагается в площади его опоры. Но и в этом случае характер устойчивости может сильно различаться. Приведенный рисунок демонстрирует тот факт, что устойчивость тела возрастает
при увеличении площади опоры и уменьшении высоты центра тяжести.
***** Глава2. §7 *****
§8. Законы сохранения импульса и момента импульса
Законы сохранения импульса и момента импульса далеко выходят за рамки классической механики. Они принадлежат к числу самых фундаментальных физических законов, так как связаны с определенными свойствами симметрии пространства – его однородностью и изотропностью соответственно.
Законсохраненияимпульса |
Законсохранениямоментаимпульса |
|||||
1. |
Импульс замкнутой |
1. |
Момент импульса замкнутой |
|||
системы не изменяется с |
системы |
относительно |
любой |
|||
течением времени: |
неподвижной точки не изменяется с |
|||||
|
(2.44) |
dp ≡ 0 и |
течением времени: |
|
||
|
|
dt |
(2.45) |
dL |
|
|
|
p = const . |
dt ≡ 0 и L = const . |
||||
|
|
|
Соответственно, момент |
импульса |
||
|
|
|
замкнутой системы относительно ее |
|||
|
|
|
центра |
инерции не изменяется с |
||
|
|
|
- 54 - |
|
|
|

|
|
|
|
|
|
течением времени: |
|
|
|||||
|
|
|
|
|
|
|
(2.46) |
|
dLC |
≡ 0 |
и L |
= const . |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
dt |
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2. |
|
|
Проявление |
2. |
|
Проявление изотропности |
|||||||
однородности |
|
|
|
пространства |
|
|
|
|
|||||
пространства |
|
|
|
|
|
|
|
|
|
|
|
||
3. |
|
Однородность19 |
3. |
|
|
|
|
|
Изотропность20 |
||||
пространства проявляется |
пространства проявляется в том, |
||||||||||||
в том, что физические |
что физические свойства замкнутой |
||||||||||||
свойства |
|
|
замкнутой |
системы и законы ее движения не |
|||||||||
системы |
и |
законы |
ее |
зависят от выбора направления осей |
|||||||||
движения |
не |
зависят |
от |
координат инерциальной системы |
|||||||||
выбора положения начала |
отсчета, то есть не изменяются при |
||||||||||||
координат |
инерциальной |
повороте в пространстве замкнутой |
|||||||||||
системы отсчета, то есть |
системы как целого на любой угол. |
||||||||||||
не |
изменяются |
при |
|
|
|
|
|
|
|
|
|||
параллельном |
переносе в |
|
|
|
|
|
|
|
|
||||
пространстве |
|
замкнутой |
|
|
|
|
|
|
|
|
|||
системы как целого. |
|
|
|
|
|
|
|
|
|
||||
4. |
Следствие второго |
4. |
|
Следствие второго закона |
|||||||||
закона |
Ньютона |
для |
Ньютона для случая вращательного |
||||||||||
случая |
поступательного |
движения тела: для замкнутой |
|||||||||||
движения |
|
тела: |
для |
системы |
главный |
вектор момента |
|||||||
замкнутой |
|
|
системы |
внешних сил М = Мвнешн ≡ 0. |
|||||||||
главный вектор |
внешних |
|
|
|
|
|
|
|
|
||||
сил Fr |
= Fr |
внешн ≡ 0. |
|
|
|
|
|
|
|
|
|
||
5. |
|
Если система не |
5. |
Если система не замкнутая, но |
|||||||||
замкнутая, но |
внешние |
внешние силы таковы, что вектор |
|||||||||||
силы |
|
таковы, |
что |
|
момента внешних сил |
||||||||
F = F внешн ≡ 0, |
|
то |
|
М = Мвнешн ≡ 0, то Lr |
= const . |
||||||||
p = const . |
|
|
|
|
Пример |
2: |
Уравновешенный |
||||||
Пример 1: Пуля массы |
гироскоп |
|
с |
|
тремя |
степенями |
|||||||
m , летящая горизонтально |
свободы, момент сил трения в |
||||||||||||
со |
скоростью |
υ |
и |
подвесе |
которого |
достаточно мал. |
|||||||
19Однородность вообще в физике связана с инвариантностью (неизменностью) свойств относительно пространственных сдвигов
20Изотропность вообще в физике связана с инвариантностью (неизменностью) свойств относительно пространственных поворотов
-55 -

застревающая в массивном |
При |
любых |
поворотах |
подставки |
||||||||
теле массы M . |
|
такого гироскопа, удерживающей в |
||||||||||
|
|
|
|
покое его центр подвеса, ось |
||||||||
|
|
|
|
гироскопа |
|
сохраняет |
|
свою |
||||
|
|
|
|
ориентацию |
|
относительно |
||||||
|
|
|
|
неподвижной |
|
инерциальной |
||||||
|
|
|
|
системы отсчета. |
|
|
|
|
|
|||
|
|
|
|
Пример 3: Пуля вылетевшая из |
||||||||
|
|
|
|
ствола нарезного |
огнестрельного |
|||||||
|
|
|
|
оружия, |
|
сохраняет |
|
свою |
||||
|
|
|
|
ориентацию |
относительно |
|
оси |
|||||
|
|
|
|
симметрии, совпадающей с линией |
||||||||
|
|
|
|
прицела (траекторией пули при |
||||||||
|
|
|
|
этом является спиральная линия). |
||||||||
6. |
Обычно F внешн |
≠ 0 и |
6. |
Обычно M внешн ≠ 0 и, однако |
||||||||
r |
|
|
|
|
|
|
|
|
Mzвнешн ≡ 0, |
|||
p ≠ const , |
однако одна из |
одна |
из |
проекций |
||||||||
проекций |
Fxвнешн ≡ 0, |
тогда Ошибка! Объект не может быть создан из |
||||||||||
тогда |
px = const , то |
есть |
кодов полей редактирования., |
то есть |
||||||||
работает закон сохранения |
работает |
|
закон |
|
сохранения |
|||||||
проекции |
импульса |
на |
проекции |
момента |
импульса |
на |
||||||
какую-либо координатную |
какую-либо координатную ось. |
|
||||||||||
ось. |
|
|
|
Пример |
5: Человек на скамье |
|||||||
|
|
|
Жуковского: |
|
|
|
|
|
|
|||
Пример 4: Абсолютно |
|
|
|
|
|
|
||||||
упругий центральный удар |
|
Z |
|
|
|
Z |
|
|
||||
двух шаров массами m1 и |
|
|
1) |
|
. |
Ù. |
2) |
|
||||
m2 , движущимися до |
|
.Ù.. |
|
|
|
|
||||||
удара со скоростями υ1 и |
|
O. |
|
|
|
O. |
|
|
||||
υ2 соответственно. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ω1 |
|
|
|
ω2 |
|
|
|
|
|
|
Человек с гантелями на скамье Жуковского |
||||||||
|
|
|
|
|
(2.47) |
J1ω1 = J2ω2 , |
|
)− |
||||
|
|
|
|
где J1,ω1 |
|
и J2 ,ω2 |
(ω2 > ω1 |
|||||
|
|
|
|
момент инерции и угловая скорость |
||||||||
|
|
|
|
вращения |
|
|
относительно |
|||||
|
|
|
|
вертикальной |
оси |
OZ |
человека |
|||||
|
|
|
|
соответственно в положениях 1 и 2. |
||||||||
|
|
|
|
- 56 - |
|
|
|
|
|
|
|
|

Аналогичные закономерности можно усмотреть в действиях фигуриста, выполняющего сложный пируэт, например, «тройной тулуп».
Импульсом и моментом импульса обладают не только частицы и тела, но и поля. Например, свет, представляющий собой поперечную электромагнитную волну, оказывает давление на поверхность отражающего или поглощающего
его тела именно потому, что электромагнитное поле световой волны обладает импульсом21. Другой пример: элементарные частицы и построенные из них системы
(атомные ядра) могут иметь момент импульса, не связанный с их движением в пространстве и называемый спином22.
***** Глава2. §8 *****
21См. курс «Оптика + для студентов инженерных специальностей». Бурмистров В.В.
22См. курс «Оптика + для студентов инженерных специальностей». Бурмистров В.В.
-57 -

Глава3.
Работа и механическая энергия23
§1. Введение
Описание различных явлений природы не сводится к применению лишь законов Ньютона, когда речь идет о механике. В соответствии с различными формами движения материи рассматривают различные формы энергии: механической, внутренней, электромагнитной, ядерной и т.д. Таким образом, понятие энергии связывает воедино все явления природы. Однако вначале в науку из человеческой деятельности пришло понятие работы. Понятия энергии и работы позволяют дополнить описание картины механического движения, установив количественные соотношения «новых» физических величин с уже известными нам физическими величинами силы, скорости, радиуса-вектора и др. Использование понятий «работа» и «энергия» очень часто позволяет значительно уменьшить усилия по нахождению той или иной искомой величины. Это особенно важно в тех случаях, когда нас интересует только конечное состояние изучаемой системы, а ее промежуточные состояния не являются предметом нашего рассмотрения.
***** Глава3. §1 *****
§2. Основные энергетические понятия
● Энергия системы
Скалярная физическая величина, являющаяся общей мерой различных форм движения материи, рассматриваемых в физике. Энергия количественно характеризует систему (тело) в отношении возможных в ней превращений движения из одних видов в другие. Эти превращения происходят благодаря взаимодействию частей системы как друг с другом, так и с внешними системами (телами).
23РАЗДЕЛ КЛАССИЧЕСКОЙ МЕХАНИКИ (см. главу 0)
-58 -

● Работа силы
Пространственная характеристика действия силы на рассматриваемую систему24 (тело).
Элементарной работой силы F 25 на малом перемещении dr называется скалярная величина
(3.1) δA = Fdrr = Fυr dt ,
r
где r и υr = ddrt − радиус-вектор и скорость точки приложения
силы;
dt − малый промежуток времени, за который сила F совершает работу δA*
Величина A = A(x, y, z) в общем случае не является
функцией состояния системы, то есть ее значение будет изменяться в зависимости от вида процесса, от траектории движения точки приложения силы и т.п., а не от начального и конечного положений состояния рассматриваемой системы (точки приложения силы). Поэтому элементарную работу обозначают δA, а не dA.
Выражение для элементарной работы можно представить также в виде
(3.2) δA = Fds cosα = Fτds ,
где ds = drv − элементарная длина пути точки приложения силы за малый промежуток времени dt ;
α − угол между векторами F и dr ;
Fτ = F cosα −проекция силы на направление перемещения dr .
Сила, нормальная к траектории точки ее приложения, работы не совершает.
24Используется в физике наряду с временной характеристикой действия силы – ее импульсом
25Под силой понимается равнодействующая всех сил, действующих на систему
-59 -

Силу F называют движущей силой, |
если |
Fτ > 0 , так что |
|||||||||
δA > 0 . |
Если |
же |
Fτ |
< 0 |
(δA < 0 ), |
|
то |
силу |
F |
называют |
|
тормозящей (силой сопротивления). |
|
|
|
|
|
|
|||||
Для материальной точки и для случая поступательного |
|||||||||||
движения абсолютно твердого тела (все его точки движутся с |
|||||||||||
одинаковыми ускорениями и скоростями!) можно получить еще |
|||||||||||
одно полезное выражение для элементарной работы δA силы F , |
|||||||||||
применив второй закон Ньютона: |
|
|
|
|
|
|
|||||
|
|
(3.3) |
|
r |
r |
|
|
r |
r |
|
|
|
|
δA = Fdr = |
Fυ |
dt =υ dp, |
|
||||||
r |
|
|
|
|
|
|
|
|
|
|
|
где p − импульс точки или тела, движущегося поступательно со |
|||||||||||
|
скоростью υr |
=υrC (υrC − скорость центра инерции тела). |
|||||||||
Выражение (3.3) устанавливает связь пространственной и |
|||||||||||
временной характеристик действия силы на систему (тело) – |
|||||||||||
работы и импульса. |
|
|
|
|
|
|
|
|
|
||
Работа A, совершаемой силой F |
на конечном участке |
||||||||||
траектории L точки ее приложения, |
равна алгебраической сумме |
||||||||||
Вычисление работы, совершаемой силой F на участке траектории L |
|||||||||||
|
|
|
|
|
Траектория L |
|
. |
||||
|
Проекция силы на направление |
|
|
|
|
|
|
||||
|
|
перемещения dr |
|
|
|
|
|
|
|||
Элементарная длина пути ds=IdrI |
|
Fτ |
|
|
|
Конец участка пути L=s |
|||||
Начало участка пути L=0 . |
|
|
. |
|
|
|
|
|
|
||
|
|
F |
|
|
|
|
|
|
|||
|
. |
|
|
|
|
|
|
|
|
|
|
работ на всех малых частях этого участка, то есть выражается |
|||||||||||
криволинейным интегралом: |
|
|
|
s |
|
|
|
||||
|
|
|
(3.4) |
r r |
|
|
|
|
|||
|
|
|
A = ∫Fdr |
= ∫Fτds , |
|
|
|||||
|
|
|
|
|
(L) |
|
|
0 |
|
|
|
|
|
|
|
|
- 60 - |
|
|
|
|
|
|