

5. Кинематические пары. Классификация кинематических пар. Высшие и низшие кинематические пары. Их достоинство и недостатки
Кинематическая пара– это подвижное соединение двух соприкасаю- щихся звеньев, допускающее относительные движения
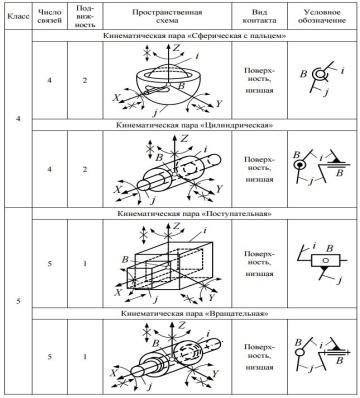
по относительному движению звеньев:
вращательные; поступательные; винтовые; плоскостные; сферические;
по виду контакта звеньев:
низшие– это кинематические пары, в которых контакт звеньев, их образующих, осуществляется по плоскости или по поверхности;
высшие– это кинематические пары, в которых контакт звеньев, их образующих, осуществляется по линии или в точке;
по способу обеспечения контакта звеньев, образующих кинематиче- ские пары: силовые– это кинематические пары, в которых постоянство контакта звеньев обеспечивается за счет действия сил тяжести или силы упругости пружины;геометрические– это кинематические пары, в которых постоянство контакта звеньев реализуется за счет конструкции рабочих поверхностей звеньев;
по числу условий связи, накладываемых на относительное движение звеньев, образующих кинематическую пару (число условий связи определяет класс кинематической пары);
по числу подвижностей в относительном движении звеньев (число подвижностей определяет подвижность кинематической пары).
Связи– это ограничения, наложенные на движения звеньев механизма, делающие их несвободными и предназначенные для передачи энергии или информации между этими звеньями.
Для образования кинематической пары необходимо наличие как мини- мум одной связи, ибо в случае равенства числа связей нулю звенья не взаи- модействуют, т. е. не соприкасаются, следовательно, кинематическая пара не существует
6.Кинематические цепи. Виды кинематических цепей
Все механизмы состоят из совокупности звеньев, образующих кинема- тические пары, которые составляют кинематические цепи.
Кинематическая цепь– это система звеньев, образующих между собой кинематические пары
Кинематические цепи подразделяются:
по конструктивному исполнению:
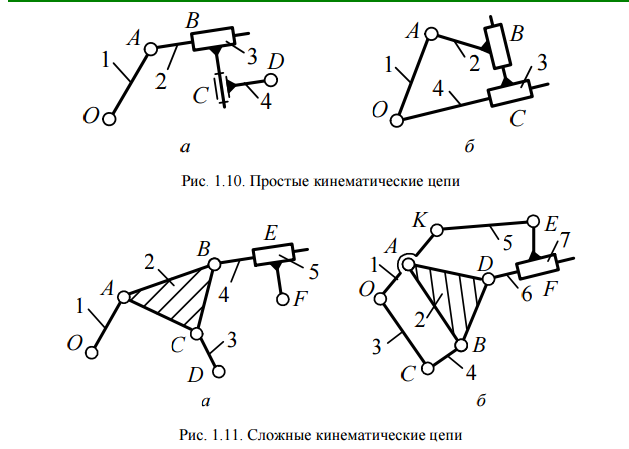
простая– это кинематическая цепь, каждое звено которой входит в состав не более двух кинематических пар, т. е. содержит только одно- или двухвершинные звенья .
сложная– это кинематическая цепь, имеющая звенья, входящие в состав трех и более кинематических пар, т. е. содержит хотя бы одно звено с тремя или более вершинами
по взаимодействию звеньев:
незамкнутая, или разомкнутая– это кинематическая цепь, в которой хотя бы одно звено имеет свободный элемент, не взаимодействующий с други- ми звеньями и не образующий с ними кинематических пар.
замкнутая– это кинематическая цепь, каждое звено которой входит в состав как минимум двух кинематических пар
Кинематическое соединение– это кинематическая пара, образованная звеньями нескольких кинематических цепей.
В зависимости от сложности структуры в механизме может присутст- вовать несколько кинематических соединений.