13. Кинематический анализ. Цель, задачи и методы. Планы положения.
При кинематическом анализе используются аналитический, графический и графоаналитический методы. К графоаналитическим методам кинематического анализа относятся: метод кинематических планов (метод планов); метод кинематических диаграмм (метод диаграмм).
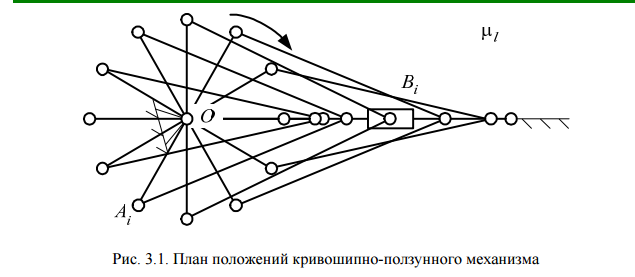
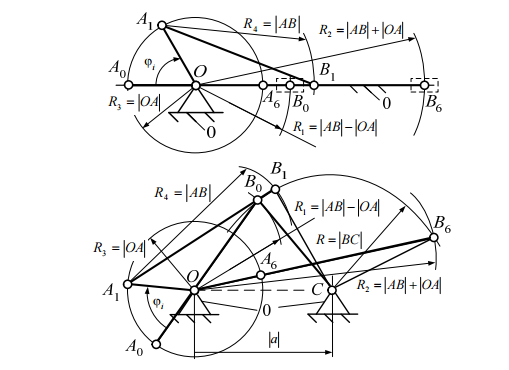
План положений механизма– это графическое изображение взаимного расположения звеньев механизма за рассматриваемый промежуток времени, выполненное в определенном масштабном коэффициенте .
14.Метод планов. План ускорений. Теорема подобия. Угловые ускорения звеньев. Пример.
Построение планов скоростей и ускорений выполняется в соответствующем масштабном коэффициенте и основано на графическом решении векторных уравнений распределения величин скоростей и ускорений между характерными точками механизма.

План ускорений– это пучок векторов, выполненный в определенном масштабном коэффициенте, лучи которого изображают векторы абсолютных ускорений характерных точек механизма, а отрезки, соединяющие их верши- ны, соответствуют векторам относительных ускорений
Из определения плана ускорений вытекают его свойства:
1) все векторы, составляющие план, являются векторами ускорений характерных точек механизма;
2) все векторы ускорений, выходящие из полюса плана (точки π), являются векторами абсолютных ускорений характерных точек механизма;
3) все векторы ускорений, не проходящие через полюс плана (точку π), являются векторами относительных ускорений характерных точек механизма;
4) ускорения характерных точек механизма, равные нулю, изображаются точечными векторами, совпадающими с полюсом плана ускорений (точкой π).
Угловое ускорение– это отношение тангенциального (касательного) ус- корения звена механизма к действительной длине этого звена.
Определение скоростей и ускорений подобных точек осуществляется по теореме подобия, которая формулируется следующим образом:
отрезки, соединяющие точки на схеме (плане положений) механизма, и отрезки, соединяющие одноименные точки на планах скоростей или ускорений, образуют подобные фигуры
15.Классификация простых зубчатых механизмов.
Простой зубчатый механизм− это трехзвенный механизм, состоящий из двух зубчатых колес и стойки. В простых зубчатых механизмах зубчатые колеса образуют между собой высшие кинематические пары, а со стойкой создают низшие кинематические пары (поступательные или вращательные).
Ведущее звено простого зубчатого механизма называется шестерня, а ведомое звено –зубчатое колесо. Параметры шестерни зубчатого механизма принято обозначать с индексом 1, а параметры зубчатых колес − с индексами, соответствующими номерам их колес.
Простые зубчатые механизмы классифицируют:
по форме начальных поверхностей:
конические
глобоидные
цилиндрические
по расположению звеньев в пространстве:
пространственные
плоские
по расположению геометрических осей:
с параллельными геометрическими осями
с пересекающимися геометрическими осями
со скрещивающимися геометрическими осями
по форме профиля зуба:
с эвольвентным профилем;
с циклоидальным профилем;
с круговым профилем (передачи Новикова)
по форме линии зуба:
с прямым зубом или прямозубые;
с косым зубом или косозубые; шевронные; с криволинейным зубом;
по форме и виду зубчатых колес:
с круглыми колесами ;
с некруглыми колесами.
16.Зубчатые механизмы. Простые зубчатые механизмы. Сложные зубчатые механизмы.
Плоский зубчатый механизм– это механизм, в котором зубчатые коле- са совершают движения в одной плоскости.
К механизмам данного вида относятся:
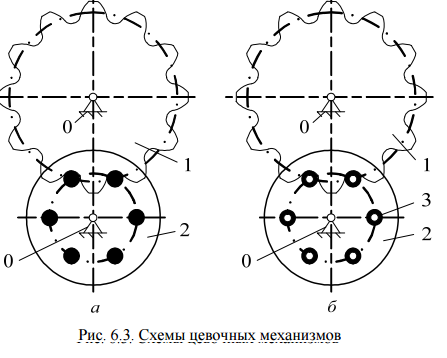
цевочные цилиндрические
торцевые
реечные
Цевочный механизм– это механизм с параллельными геометрическими осями вращения звеньев, одно из которых имеет специальные цилиндрические выступы-цевки
Простой зубчатый механизм− это трехзвенный механизм, состоящий из двух зубчатых колес и стойки. В простых зубчатых механизмах зубчатые колеса образуют между собой высшие кинематические пары, а со стойкой создают низшие кинематические пары (поступательные или вращательные).