

2.3. Аналіз технологій і способів збирання зернових в тов "Агро-Флагман"
?????
2.4. Розрахунок технологічного забезпечення при запропонованій технології збирання
??????
3. Обгрунтування параметрів культиваторної стійки зі змінною жорсткістю
3.1. Аналіз існуючих конструкцій робочих органів ґрунтообробних машин
У комбінованих культиваторах для поверхневого обробітку ґрунту забезпечується ешелонованість розміщення робочих органів та збільшення загальної ширини захвату. Широко використовуються підпружинені робочі органи з розпушувальними або полольними лапами 30-330 мм завширшки, подрібнювачі грудок та вирівнювачі поверхні. До основних робочих органів розпушувачів належать плоскорізна та чизельна лапи, дисковий подрібнювач, котки та ротаційні борони (різних типів). Допоміжними елементами конструкції розпушувача є рама, опорні та транспортні колеса. Розпушувач для різноглибинного обробітку ґрунту є одним із найскладніших ґрунтообробних знарядь типу чизелів.
Різноглибинний чизельний обробіток ґрунту передбачає поєднання мілкого суцільного та глибокого смужного розпушення за певного взаємного розміщення робочих органів чизельного типу. Основні агротехнічні вимоги до основних робочих органів наступні:
- поєднання двох типів чизельних робочих органів - для мілкого розпушення орного шару ґрунту та його поглиблення;
- глибина суцільного мілкого розпушення 12...22 см;
- глибина ходу робочих органів для смужного поглиблення шару ґрунту Н1;
- ширина глибокорозпушувача 5 - 20 см;
- відстань D між розпушеними смугами в нижньому шарі ґрунту.
- відстань S між стояками суміжних робочих органів у ряду, що відповідає умові незаклинювання скиби.
Глибина ходу робочих органів для смужного поглиблення шару ґрунту Н1 повинна відповідати умові:
Н1 = Н + 5 - 15 см, (3.1)
де Н - глибина попередньої оранки;
Відстань D між розпушеними смугами в нижньому шарі ґрунту визначається згідно умови:
![]() ,
(3.2)
,
(3.2)
де h - глибина поверхневого розпушення верхнього шару ґрунту, яка зумовлена глибиною розміщення основної маси коріння бур’янів, h = 3...16 см;
α - кут сколу, α = 40...50°.
Відстань S між стояками суміжних робочих органів у ряду, що відповідає умові незаклинювання скиби повинна відповідати наступній умові:
![]() ,
(3.3)
,
(3.3)
де Вл - ширина розпушувальної лапи;
Нмах - максимальна глибина розпушення;
ψ - кут сколу ґрунту.
При недостатній відстані між робочими органами верхнього і нижнього ярусів виникає згруджування ґрунту, оскільки елементи верхньої скиби стикаються з нижніми до падіння їх на дно борозни. Розпушення ґрунтового середовища клином є одним із найпоширеніших способів поліпшення його властивостей. Обсяги застосування розпушення ґрунту без обертання скиби знаряддями неполицевого типу зростають і найближчим часом можуть становити 25 - 35 % всіх посівних площ в Україні.
Агротехнічні вимоги до розпушувачів передбачають їх роботу на глибину 5 - 22 см, а при розущільненні підорного шару ґрунту до 35 см, з 75 %-м розпушенням ґрунту, збереженням 60 - 80 % рослинних решток на поверхні поля та гребінчастістю поверхні, що не перевищує 5 см. Плоскорізи та розпушувачі (чизелі) доцільно ширше використовувати в зонах недостатнього зволоження, а також на агрофонах з незначною кількістю рослинних решток замість оранки, особливо весняної. Це дає змогу скоротити на 20 - 40 % терміни проведення обробітку ґрунту, зменшити на 6-12 кг/га витрати пального, вирішити загальні проблеми ґрунтозахисту при лімітованому енергозабезпеченні.
На вітчизняних заводах серійно випускають ефективні ґрунтообробні знаряддя на основі плоскорізних та чизельних робочих органів. У цих розпушувальних агрегатах застосовують ефективні ротаційні приставки для подрібнення і вирівнювання поверхневого шару ґрунту. Такі знаряддя відіграють важливу роль під час обробітку схилових (3-7°) земель, зокрема, при впровадженні контурно-меліоративної ґрунтозахисної системи землеробства. Вони сприяють додатковому накопиченню 12-15 мм продуктивної вологи, тому їх рекомендується використовувати, зокрема, на півдні України. За потреби більш інтенсивного обробітку поверхневого шару ґрунту - подрібнення рослинних решток - поширюється обробіток чизельними культиваторами, до складу робочих органів яких додаються також дискові секції або окремі диски (ПЩН - 2,5, КРН - 4,5, КШН - 5,6 тощо). Ці знаряддя широко застосовують для суцільного обробітку ґрунту.
Аналізуючи різні конструкції робочих органів ґрунтообробних машин і знарядь, можна констатувати, що вони завжди зв’язані зі стійками, при чому стійки прикріплюються до рами машин жорстко або шарнірно. Шарнірне з’єднання може бути одне або багато шарнірним (чотирьохланковим). Жорстке кріплення полягає в тім, що стійки 2 (рис. 3.1, а) разом з робочими органами 3 прикріплюють болтами до бруса 1 рами машини. Заглиблення робочих органів визначається силою ваги машини та реакцією Rxz на робочі органи. Глибина ходу обмежується опорними колесами 4.
Система жорсткого кріплення відрізняється простотою конструкції та малою вагою. Копіювання рельєфу при такому з’єднанні залежить у поздовжньому напрямку від положення рами, а в поперечному - від ширини захвата знаряддя. При твердому з’єднанні недостатньо копіюється мікрорельєф поля, не витримується постійної глибина ходу робочих органів по ширині захвата. Одношарнірне кріплення характеризується тим, що стійки (рис. 3.1,б) разом з робочими органами 3 і повідцем 8 шарнірно пов’язані із брусом 1 рами машини.
Розрізняють індивідуально-поводкову та секційну одношарнірну систему кріплення. При індивідуально-поводковій системі до кожного поводця приєднують по одному робочому органу (лапи культиваторів для поверхневого обробітку ґрунту, а також сошники зернових і універсальних сівалок), а при секційної - кілька робочих органів (начіпні бавовняні культиватори, лущильники та інш.). Робочий орган заглиблюються під дією сили ваги Pс секції, реакції Rxz на робочі органи, а також за допомогою натискних пружин (сила Fu) або додаткових вантажів. Максимальна глибина обмежується упорами штанг 7, ребордами (полозками) або катками.


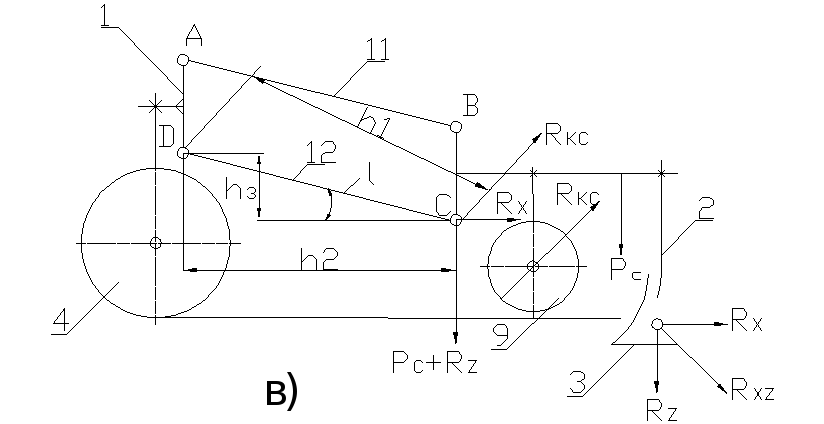
Рис. 3.1. Схеми кріплення робочих органів до рами:
а - жорстке; б - одношарнірне; в - чотирьохланкове;
1 - брус рами машини; 2 - стійка; 3 - робочий орган; 4 - колесо рами; 5 - двухплечий важіль; 6 - натискна пружина; 7 - штанга; 8 - поводець; 9 - опорне колесо секції; 10 - повзун важеля; 11 й 12 - планки паралелограмного механізму
Одношарнірна система кріплення дозволяє краще, ніж жорстке кріплення, копіювати рельєф поля, як у поздовжньому, так і в поперечному напрямку. Чотирьохланкова система кріплення виглядає так (рис. 3.1, в): стійки 2 (ланка BC) разом з робочими органами 3 прикріплені до бруса l (ланка AD) рами машини через повідців 11 й 12 (ланки АВ й DC).
В основному застосовується чотирьохланкова система з паралелограмним механізмом, у якому ланки AB\\DC и AD\\BC. Опірне колесо 9 секції копіює мікрорельєф поля. Рух колеса по нерівностям призводить к основному переміщенню ланки ВС, яка входить в паралелограмний механізм. При цьому кут установки робочого органа до поверхні поля не змінює свого значення. Паралелограмна система застосовується для кріплення лап в просапних культиваторах, сошників в бурякових і кукурудзних сівалках, а також у садильних машинах. При такій системі краще копіюється мікрорельєф поля і робочі органи витримують задану глибину ходу.
Заглиблення робочих органів визначається силою ваги Рс і реакцій Rxt. Положення ланок АВ й DC механізму впливає як на заглиблення, так і на силу реакції Rкс діючої на колесо. Плечі h1 й h1 при нахилі ланок АВ й CD змінюються незначно. Тоді реакція Rкс на опорне колесо секції тим менше, чим більше кут α. Зі збільшенням кута α здатність робочих органів до заглибленню зменшується. Необхідний кут установки робочих органів у всіх системах кріплення досягається поворотом стійки щодо поводця. У паралелограмній системі може змінюватися довжина верхньої ланки АВ, що дозволяє впливати й на кут установки.
В існуючих конструкціях підвіски робочих органів культиваторів основною проблемою є невідповідність ступеню копіювання рельєфу поля заданим параметрам. Причина цього заключається в тому, що рельєф поля копіюють два елементи – опорне колесо та сам робочий орган. Тому на стійкість ходу лапи по глибині обробки в першу чергу буде впливати переміщення опорного колеса.
Виходячи з цього в конструкціях механізму підвіски, особливо паралелолограмної, визначальне значення мають співвідношення розмірів елементів кріплення колеса і робочого органу. В конструкціях сучасних ґрунтообробних машин ці параметри вимагають вдосконалення. Сучасні світові тенденції в одержанні екологічно чистої продукції потребують хоча б часткової відмови від хімічних засобів боротьби з бур'янами. Тому в проведенні знищення бур'янів підвищується значення культиваторів як найбільш ефективного механічного засобу. У свою чергу зростають вимоги і до технічного рівня ґрунтообробних знарядь.
Культиваторні лапи є найбільш поширеними робочими органами ґрунтообробних сільськогосподарських машин. У процесі взаємодії з ґрунтом вони піддаються інтенсивному абразивному спрацюванню. їх термін служби залежить від матеріалу, умов експлуатації, типу і властивостей ґрунту, кутів загострювання тощо. Головною вимогою до роботи культиваторних лап є забезпечення якісного виконання технологічного процесу за мінімально можливих енерговитрат. Комплексний підхід до вирішення викладених питань у процесі спрацювання ґрунтообробних робочих органів є, безумовно, актуальним.