

3.4. Обґрунтування теоретичної моделі активної культиваторної лапи
Згідно
з вищенаведеними математичними
залежностями процесу взаємодії з
ґрунтовим середовищем активної
культиваторної лапи з можливістю її
повертання в горизонтальній площині
реалізована теоретична модель за
допомогою числових методів у математичному
пакеті Mathcad.
Змінними параметрами є відповідно: кут
повертання лапи в горизонтальній площині
(![]() )і
відстань від носка лапи до осі її
повертання (LAC),
параметри
фізико-механічних властивостей ґрунту
розраховані для умов чорнозему типового
опідзоленого. Графічна інтерпретація
процесу показана на рис. 3.6.
)і
відстань від носка лапи до осі її
повертання (LAC),
параметри
фізико-механічних властивостей ґрунту
розраховані для умов чорнозему типового
опідзоленого. Графічна інтерпретація
процесу показана на рис. 3.6.

Рис. 3.6. Теоретична залежність кута повертання ° лапи (LАС = 0,12 м):
1 – = 0°; 2 – = ± 15°; 3 – = ± 30°
З
графіка (рис. 3.6) видно, що модель
підтверджує відсутність повертання
лапи (лінія 1) при її жорсткій фіксації
до стояка. При наданні різальній лапі
можливості обмеженого повертання в
межах ±
15°
(лінія 2) спостерігаються вимушені
коливання. Вони відбуваються внаслідок
взаємодії різальних поверхонь із
ґрунтовим середовищем. У даному випадку
середовище виконує роль вимушеної сили.
Вимушена сила викликає гармонійний рух
носка лапи з періодом Т
=
0,09с,
який збільшується відповідно до
збільшення можливого кута обмеженого
повертання. Якщо культиваторній лапі
збільшити кут обмеженого повертання у
два рази
![]() ,
то характер гармонійних коливань
культиваторної лапи в цілому не зміниться.
Період коливання буде Т = 0,11 с.
,
то характер гармонійних коливань
культиваторної лапи в цілому не зміниться.
Період коливання буде Т = 0,11 с.
Теоретично
встановлено, що максимальний кут можливих
коливань активної культиваторної лапи
в горизонтальній площині слід обмежувати
до ±30°, а відстань від носка лапи до осі
її повертання (LAC)
слід вибрати наближеною до 0,1м. Враховуючи
те, що для ефективної роботи лапи
достатнім кутом можливого повертання
культиваторної лапи в горизонтальній
площині є кут
![]() ,
відстань від носка лапи до осі її
повертання - 100мм. За цих параметрів
максимальна кутова швидкість стояка
лапи буде 32 с-1.
Функція зміни кутового прискорення є
періодичною, період дорівнює приблизно
0,1с, кутове прискорення змінюється від
максимуму, величина якого дорівнює
,
відстань від носка лапи до осі її
повертання - 100мм. За цих параметрів
максимальна кутова швидкість стояка
лапи буде 32 с-1.
Функція зміни кутового прискорення є
періодичною, період дорівнює приблизно
0,1с, кутове прискорення змінюється від
максимуму, величина якого дорівнює
![]() ,
до мінімуму -
,
до мінімуму -![]() з нульовими значеннями в крайніх
положеннях культиваторної лапи.
з нульовими значеннями в крайніх
положеннях культиваторної лапи.
За
допомогою розробленої комп'ютерної
програми розраховано теоретичний
тяговий опір активної культиваторної
лапи (рис.
3.7).
Якщо,
![]() то знизити тяговий опір активної
культиваторної лапи можливо на 19 %.
Суттєвим конструктивним параметром,
який впливає на зменшення тягового
опору, є кут можливого повертання
культиваторної лапи. При цьому оптимальним
кутом можна вважати кут можливого
повертання лапи в межах ± 30°. Подальше
його збільшенняприведе
до
утворення нестабільного періоду, що
негативно впливає на динаміку робочого
органу та на його надійність. При
збільшенні довжини леза, питомий тяговий
опір збільшується на 1,6 кН/м, а період
коливань - на 0,45 с/м.
то знизити тяговий опір активної
культиваторної лапи можливо на 19 %.
Суттєвим конструктивним параметром,
який впливає на зменшення тягового
опору, є кут можливого повертання
культиваторної лапи. При цьому оптимальним
кутом можна вважати кут можливого
повертання лапи в межах ± 30°. Подальше
його збільшенняприведе
до
утворення нестабільного періоду, що
негативно впливає на динаміку робочого
органу та на його надійність. При
збільшенні довжини леза, питомий тяговий
опір збільшується на 1,6 кН/м, а період
коливань - на 0,45 с/м.
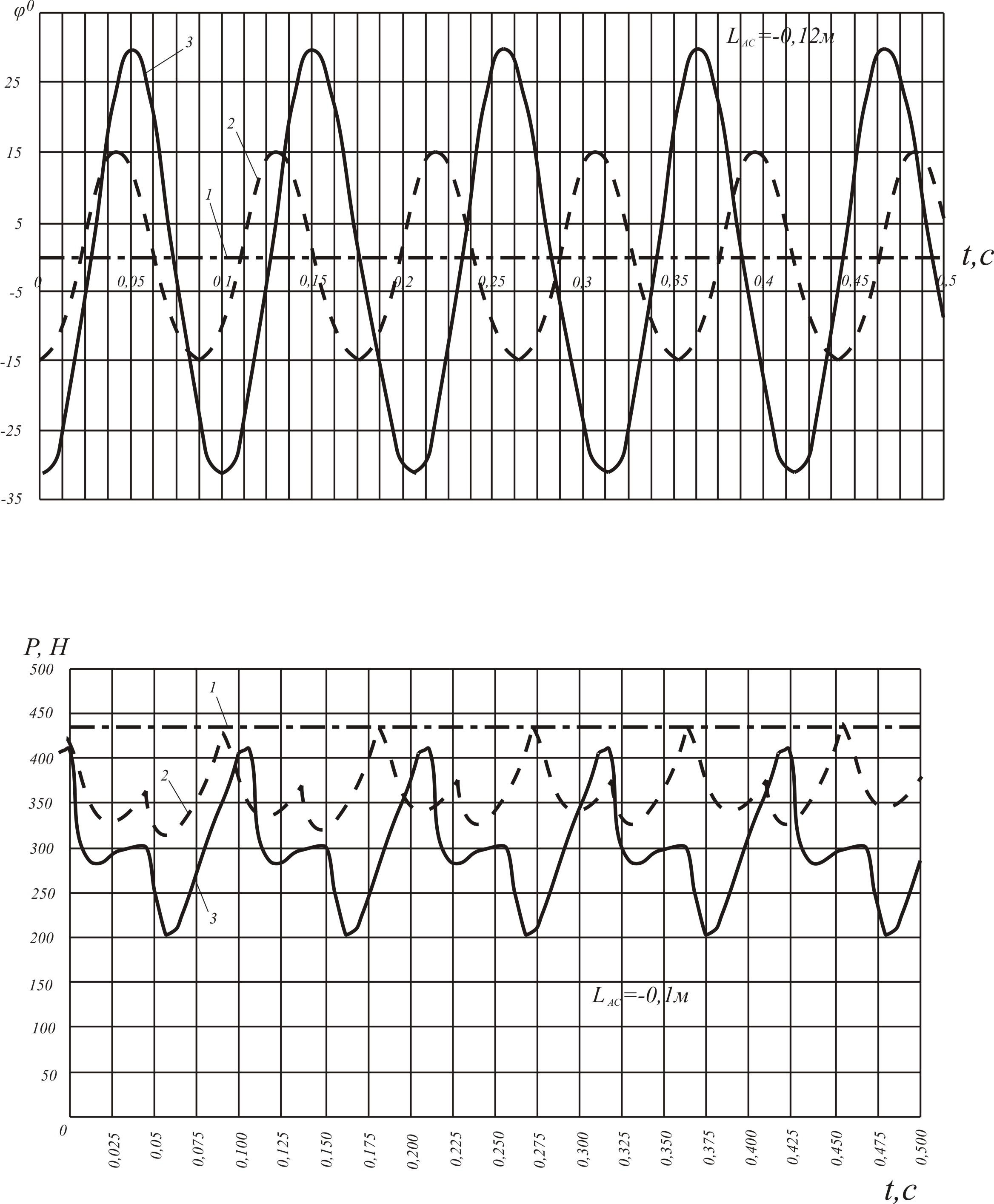
Рис. 3.7. Зміна тягового опору (Р) активної культиваторної лапи,
при (LАС – 0,1 м):
1 – = 0°; 2 – = ± 15°; 3 – = ± 30°
3.5. Розробка механізму регулювання відстані між лапами культиватора
Для забезпечення обробітку ґрунту промисловістю освоєні та випускаються різні типи культиваторів для обробітку ґрунту в різних природно-кліматичних зонах. Конструктивно вони відрізняються між собою набором основних робочих органів, їх типом, способом кріплення до рами та до енергозасобів. Але не дивлячись на значні, як технологічні так і конструктивні відмінності до всіх культиваторів, як показує аналіз їх конструкцій, ставляться одинакові вимоги.
Перш за все, якість роботи культиваторів визначається постійністю глибини обробітку і здатністю робочих органів копіювати мікрорельєф поля. Для забезпечення постійної глибини обробки на культиваторі в безпосередній близькості до робочих органів встановлюються опірні колеса, які в культиваторах використовуються для приводу туковисіваючих апаратів.
Не менш важливим являється система кріплення робочих органів до рами культиватора. Жорстке зєднання хоч і являється простим і легким, але його використання обмежене через недостатню степінь копіювання рельєфу і недотримання заданої глибини обробітку при ширині захвату більше 2 м.
Тому в сучасних культиваторах для суцільного обробітку ґрунту використовується шарнірне зєднання, яке краще забезпечує копіювання рельєфу та постійність заданої глибини обробітку, так як дозволяє робочим органам переміщуватись відносно основної рами знаряддя. Відрізняють одношарнірне і багатошарнірне приєднання. В одношарнірній (радіальній) системі переміщення робочих органів повязане із зміною кута входження лап в ґрунт; в багатошарнірній (паралелограмній) системі кут входження залишається постійним.
Для забезпечення постійної глибини ходу шарнірні системи повинні дозволяти робочим органам пристосовуватись до мікрорельєфу поля, тобто допустити вільне переміщення робочого органу в вертикальній площині (без виглублення) на величину, яка залежить від ширини захвату знаряддя і стану поверхні оброблюваного поля. Для сучасних тракторних культиваторів із шарнірним кріпленням робочих органів їх відхилення до гори та навпаки від номінального положення повинно бути не менше 150 мм.
В звязку із певним ступеням вільності переміщення робочих органів в конструкції культиваторів обовязково передбачаються різного роду обмежувачі – копіювальні полозки, опірні тяпки і колеса. Введення в систему кріплень робочих органів вищезгаданих обмежувачів збільшує тяговий опір знаряддя на величину сили тертя, яка виникає під дією навантаження на полозок або опірне колесо. Тому однією із вимог до конструкцій являється те, що копіювання рельєфу повинно забезпечуватись при мінімальному, але достатньому для чіткого копіювання навантаження.
В звязку з тим, що із зміною глибини обробітку змінюється кут входження лап в ґрунт, крім того в залежності від конструкції культиваторів, обовязково повинне допускатись регулювання кута встановлення лап відносно опорної поверхні відповідно до умов роботи.
Аналіз сучасних конструкцій культиваторів, особливо до суцільного обробітку ґрунту (парових), свідчить про те, що найбільш проблемним в даний час являється оптимальне розміщення лап на рамі культиватора. В звязку із значним впливом лап на роботу сусідніх, до основних показників слід віднести:
ширину захвату;
величина перекриття між лапами;
відстань між лапами по ходу культиватора (рис. 3.8).
Ширина захвату в1і в2лап залежить від їх кількості та загальної схеми розміщення. Тому в звязку з тим, що навантаження на передні лапи більше, ніж на задні, для вирівнювання навантаження між рядами лап, ширину захвату окремих лап заднього ряду вибирають більшою ніж передніх.

Рис. 3.8. Схема перекриття між лапами
Відстань Lміж рядами лап впливає на якість обробітку та надійність технологічного процесу. Як правило, значенняLзнаходиться в межах 400-500 мм, при цьому в жодній із конструкцій культиваторів не передбачено зміну величиниL в залежності від глибини обробітку та умов роботи.
Проте, як показав досвід, використання парових культиваторів на важких ґрунтах, або сильнозабурянених масивах інколи для підвищення надійності технологічного процесу необхідно змінювати величинуL. Причому, бачиться доцільним та необхідним пристосування для зміни величиниLбез зупинки агрегату.