

Библиотека электрических машин (Machines)
Эта библиотека содержит синхронные, асинхронные машины и машины постоянного тока. Все машины могут быть представлены как в абсолютных, так и относительных единицах. Универсальный блок измерений (Measurement demultiplexer) позволяет измерить требуемые переменные состояния машины.
Лабораторная работа № 1 Цифровое Моделирование схемы электропривода с двигателем постоянного тока
1.1 Общая постановка задачи
Целью работы является изучение методов построения цифровой модели электропривода с двигателем постоянного тока. В данной работе для моделирования представлена схема: тиристорный преобразователь – двигатель.
Структурная схема, которую необходимо смоделировать, приведена на рисунке 1.1.

Рисунок 1.1 – Структурная схема для моделирования
По заданным значениям параметров структурной схемы и виду нелинейного звена (приведены в приложении А) необходимо провести моделирование данной структурной схемы двумя способами:
-
по структурной схеме при помощи пакета прикладных программ MatLab Simulink;
-
по системе дифференциальных уравнений, составленных по приведённой структурной схеме и реализованной в среде программирования.
Итогом моделирования является получение графика переходных процессов скорости и тока. По полученным графикам переходных процессов получить его основные параметры: перерегулирование, время первого согласования, время переходного процесса, скорость нарастания тока.
Пример выполнения задания на моделирование приведён в пункте 1.2.
1.2 Пример выполнения задания
1.2.1 Постановка задачи и исходные данные
Задача: Необходимо провести моделирование по структурной схеме, приведённой на рисунке 1.2, и получить график переходного процесса скорости (график переходного процесса тока необходимо получить самостоятельно).
На схеме НЗ – нелинейное звено, представленное на рисунке 1.2.

Рисунок 1.2 – Функция работы нелинейного звена
Параметры нелинейного звена:
Коэффициент наклона (К): 1.5;
Верхний ограничительный предел (Uверх): 300 В;
Параметры структурной схемы заданы в таблице 1.1.
Таблица 1.1 – параметры структурной схемы
|
Rя, Ом |
Тя, с |
Тм, с |
КФ |
Uя, В |
Ic, А |
Ктп |
Ттп, с |
α |
|
6 |
0.08 |
0.05 |
0.2 |
220 |
9 |
0.8 |
0.06 |
170° |
1.2.2 Моделирование системы по структурной схеме в MatLab simulink
Данный способ моделирования производится путём построения структурной схемы, аналогичной заданной, в системе моделирования Simulink.
Таблица 1.2– Таблица кодирования параметров
|
В схеме |
α |
Rя |
Tя |
Тм |
KФ |
Ic |
Kтп |
Ттп |
K |
Uверх |
|
В программе |
alpha |
Ra |
Ta |
Tm |
Koc |
Ic |
Kp |
Tp |
K |
UB |
Для построения модели необходимо создать М–файл (обычный текстовый файл, создаваемый в MatLab, и имеющий расширение mat), где введены параметры системы с их значениями.
Процедура создания М–файла:
1) запускаем MatLab;
2) последовательно выбираем в панели задач File→New→M-file (появляется окно М–файла с названием Untitled);
3) выполняем задание переменных в соответствии с таблицей кодирования. Для этого вводим в окне М–файла значения параметров:
Ra=6; Ta=0.08; Tm=0.05; Koc=0.2; Ic=9; Ktp=0.8; Ttp=0.06; alpha=170; UB=300; K=1.5
4) сохраняем созданный М–файл в папке Work;
5) запускаем М–файл с помощью кнопки Run на панели управления.
Для построения заданной структурной схемы в системе Simulink требуется выполнить следующие действия:
1) Выбираем File→New→Model (появляется окно модели с названием Untitled).
2) На панели управления выбираем значок с названием Library Browser, после нажатия на который открывается библиотека компонентов для создания модели. В левой части окна перечислены разделы, хранящие необходимые для моделирования элементы.
3) В разделе Continuous выбираем элемент Transfer Fcn (передаточная функция) и перетаскиваем его мышью в окно модели. Следует учесть, что для моделирования контура тока понадобится несколько элементов Transfer Fcn, поэтому процедуру по перемещению необходимо произвести несколько раз. В разделе Math Operations выбираем сумматоры (Sum). Далее выбираем из раздела Skins блоки Scope (прибор регистрации сигналов или «осциллограф»). Добавляем из библиотеки компонентов источник управляющего воздействия, а так же источник возмущения из раздела Sourses. Так как управляющее и возмущающее воздействия моделируются ступенчатыми сигналами, выбираем блоки с названием Step.
4) Для реализации нелинейного звена требуется применение нелинейного блока из библиотеки Discontinuities. В данной библиотеке представлены различные виды нелинейных блоков. Для выполнения задания, указанного выше, требуется применение блока ограничения Saturation. Так же для задания коэффициента наклона у нелинейного звена потребуется блок под названием Gain (усилитель) из раздела Math Operations.
5) Размещаем все блоки согласно схеме, изображённой на рисунке 1.3 и устанавливаем связи между блоками, соединяя их однонаправленными линиями.

Рисунок 1.3 – Модель заданной системы
Двойным кликом мыши по блоку можно открыть его для редактирования. Таким образом, необходимо подставить в блоки соответствующие параметры (в общем виде) согласно схеме, изображенной на рисунке 1.3.
Процедура задания параметров блоков в модели:
а) в блоке, задающем управляющий сигнал (блок Step на входе системы), необходимо задать величину управляющего воздействия (в строку final value): α=170°.
б) в блоке ограничения Saturation в пункте Upper limit (верхний предел) заносится значение UB (UB=300 B) и в пункте Lower limit (нижний предел) заносится значение 0.
в) в блоке, устанавливающем величину возмущающего воздействия (блок Step), необходимо задать время приложения нагрузки в секундах (строка Step time). Задаем момент времени приложения тока статического, равный 3 секунды, считая от момента пуска двигателя. Таким образом, предполагаем, что переходный процесс по управляющему воздействию закончится раньше, чем через 3 секунды и лишь затем начнётся переходный процесс отработки возмущающего воздействия. Далее необходимо задать величину возмущающего воздействия (в строке final value задаём значение Ic).
В меню следует выбрать Simulation→Configuration parameters и в графах Start time и Stop time установить время начала и конца работы модели в секундах (для нашего случая время начала 0, а время окончания – 5 секунд). Для каждого конкретного переходного процесса требуется задание собственных значений начала и конца моделирования для создания наиболее наглядного его изображения. Для задания периода моделирования (задержка между отсчётами) требуется задать в разделе Solver Options значения Type: Fixed Step (выбрать из выпадающего списка) и Fixed Step Size = 0.001. В таком случае будет выбран период, при котором процесс будет достаточно гладким. При увеличении данного интервала на графике переходного процесса будут заметны переломы (значит, моделирование происходило с недостаточной точностью).
Указав все параметры системы, следует запустить её на выполнение, нажав на панели кнопку ► (Start simulation).
Теперь можно просмотреть графики переходных процессов. Для этого необходимо просмотреть «содержимое» блока Scope («осциллограф»), дважды щелкнув по нему левой кнопкой мыши. На рисунке 1.4 представлен полученный график переходного процесса скорости.
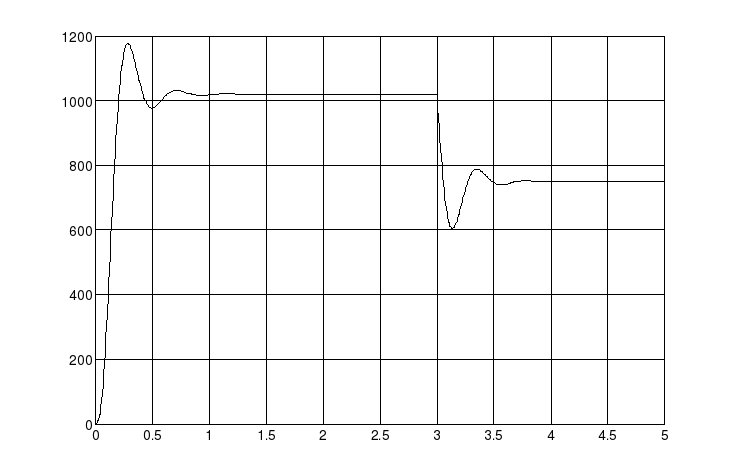
Рисунок 1.4 – Переходный процесс скорости
По полученному графику можно определить основные параметры переходного процесса скорости, а так же убедиться, что система устойчива.