

2.4 Указания к составлению отчёта
Отчёт по работе должен содержать: расчёт параметров двигателя; структурную схему модели, построенную в среде MatLab Simulink; переходные процессы скорости и тока при разгоне двигателя в холостую и при приложении нагрузки; выводы по каждому из методов моделирования и в целом по работе.
2.5 Контрольные вопросы
1. Какие различия проявляются при моделировании двигателя, описанного во вращающейся системе координат, в отличие от неподвижной системы координат?
2. Каким образом можно проверить паспортные параметры двигателя по переходному процессу скорости и тока, построенным в данной модели?
3. Что необходимо изменить в модели двигателя переменного тока, чтобы получить переходный процесс потока ротора и статора?
Библиографический список
-
Герман-Галкин, С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0 : учеб. пособие / С.Г. Герман-Галкин. – СПб.: КОРОНА принт, 2007. 320с, ил.
-
Копылов, И.П. Справочник по электрически машинам: В 2 т. / И.П. Копылов, Б.К. Клокова. Т. 1. – М.: Энергоатомиздат, 1988. –456 с.: ил.
-
Фираго, Б.И. Регулируемые электроприводы переменного тока / Б.И Фираго, Л.Б. Павлячик. – Мн: Техноперспектива, 2006.–363 с.
-
Фролов Ю.М., Бурковский В.Л. Математическое моделирование в автоматизированном проектировании электроприводов: Учеб. пособие, Воронеж: ВГТУ, 2000. 143 с.
-
Ключев В.И. Теория электропривода: Учебник для вузов. М.: Энергоатомиздат. 1985. 560 с.
-
Чиликин М.Г., Ключев И.В., Сандлер А.С. Теория автоматизированного электропривода: Учеб. пособие для вузов. М.: Энергия, 1979. 616 с.
-
Егоров В.Н., Корженевский-Яковлев О.В. Цифровое моделирование электропривода. Л.: Энергоатомиздат. Ленинградское отделение, 1986. 168 с.
-
Фролов Ю.М. Конспект лекций по дисциплине "Моделирование в электроприводе" для студентов специальности 180400 "Электропривод и автоматика промышленных установок и технологических комплексов" В 2 ч. Воронеж: ВГТУ, 2000.
-
Терехов В.М. Элементы автоматизированного электропривода. Учебник для вузов. М.: Энергоатомиздат. 1984. 224 с.
-
Тун А. Я. Системы контроля скорости электропривода. М.: Энергоатомиздат, 1984. 168 с.
-
Теория автоматического управления: Учеб. для вузов. Н.А. Бабанов, А.А. Воронов, А.А. Воронова и др. В 2 ч. Ч. I. Теория линейных систем автоматического управления. 2-е изд., перераб. и доп. / Под ред. А.А. Воронова. М.: Высшая школа, 1986. 367 с.
-
Егоров В.Н., Шестаков В.У. Динамика систем электропривода. Л.: Энергоатомиздат. Ленинградское отделение, 1983. 216 с.
-
Дьяконов В, Круглов В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник. – СПб.: Питер, 2002. – 448 с.
-
Слепокуров Ю.С. MATLAB 5. Анализ технических систем: Учеб. пособие. / Воронеж: Изд-во ВГТУ, 2001. – 167 с.
Приложение а Задание для лабораторной работы №1
Таблица А.1 – Варианты заданий для лабораторной работы №1
|
Вариант |
|
|
|
КФ ( |
|
|
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
5 10 15 20 25 30 27 24 22 19 18 17 15 16 14 13 12 11 9 8 7 6 4 3 2 |
0.06 0.02 0.06 0.04 0.05 0.12 0.05 0.04 0.20 0.02 0.01 0.12 0.03 0.04 0.08 0.06 0.05 0.04 0.16 0.05 0.24 0.23 0.12 0.03 0.22 |
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.08 0.09 0.08 0.07 0.06 0.05 0.04 0.05 0.04 0.03 0.08 0.10 0.12 0.11 0.02 0.11 0.15 |
0.2 0.18 0.15 0.14 0.12 0.08 0.09 0.10 0.14 0.15 0.16 0.17 0.18 0.20 0.21 0.05 0.035 0.015 0.03 0.045 0.07 0.08 0.09 0.11 0.15 |
220 200 180 160 120 100 120 140 160 180 200 220 240 250 260 60 40 20 40 60 90 100 120 160 180 |
10.0 5.0 4.0 3.0 2.0 1.0 8.0 9.0 10.0 10.0 20.0 15.0 10.0 20.0 25.0 2.0 1.5 0.5 1.0 1.0 2.0 3.0 4.0 5.0 20.0 |
Продолжение таблицы А.1 – Варианты заданий для лабораторной работы №1
|
Вариант |
Нечувствительность, В |
К наклона |
Ограничение, В |
|
|
|
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
200 200 200 100 100 50 50 50 50 25 25 25 30 30 30 40 40 40 30 30 30 20 20 20 40 |
5 4
2 1
0.8 0.7
0.5 0.4
0.25 0.2
0.4 0.5
0.8
5.0 7.0 |
800 700 600 500 400 300 200 150 250 300 350 400 500 600 700 750 800 850 900 500 700 800 900 800 600 |
0.9 2.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0 0.8 0.7 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 2.9 |
0.05 0.06 0.07 0.08 0.09 0.10 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.20 0.15 0.14 0.13 0.12 0.11 0.10 0.09 0.09 0.07 |
170 160 150 171 165 155 151 152 153 154 156 157 158 159 161 162 163 164 163 162 161 149 148 147 149 |
На рисунке А.1 представлены варианты заданий для нелинейного звена (общий вид нелинейности).
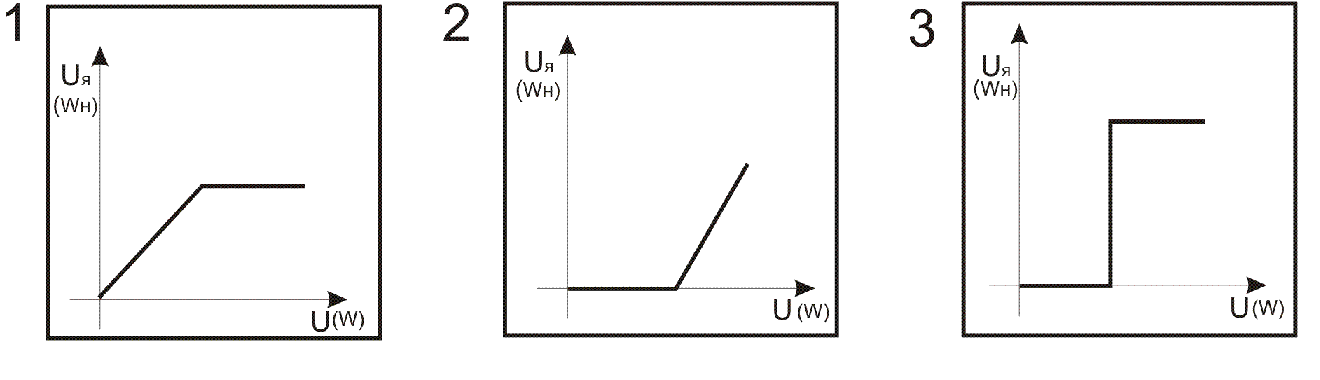
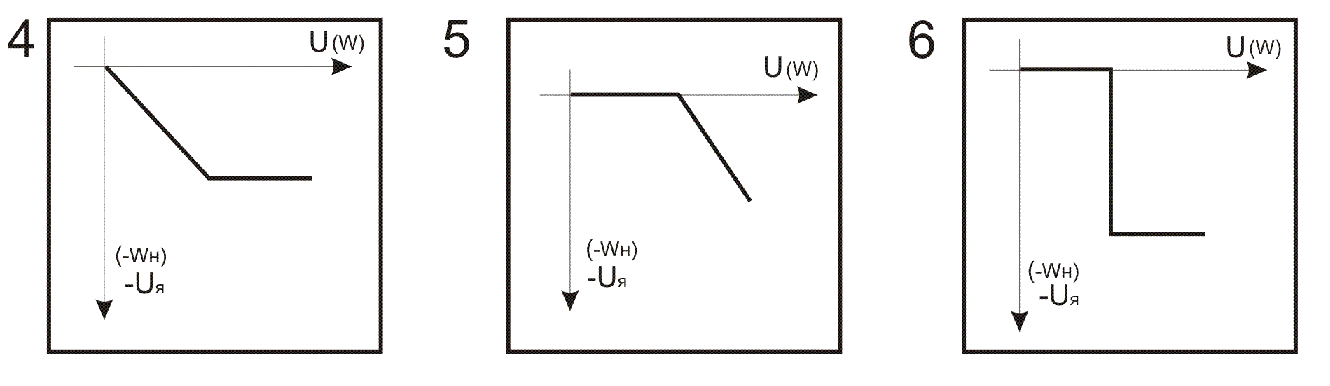

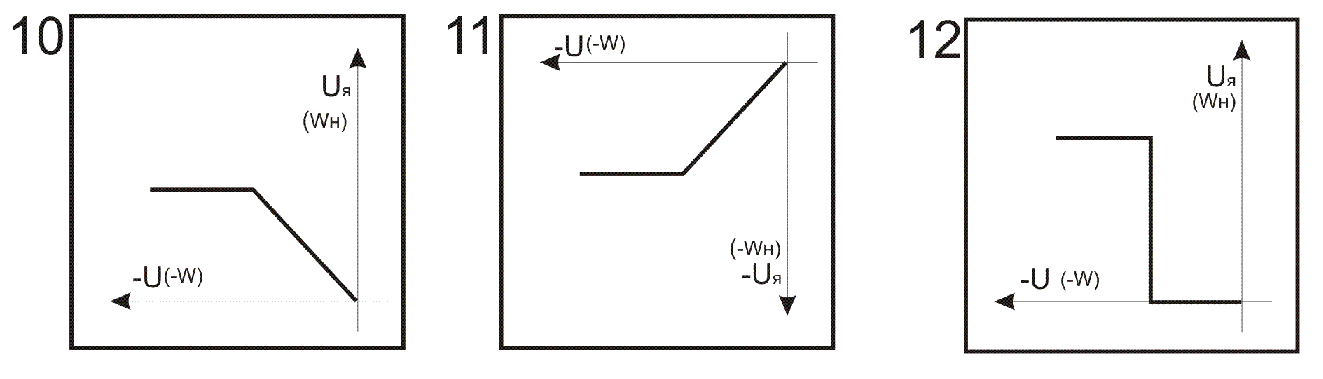
Рисунок А.1 – Варианты общего вида для нелинейного звена
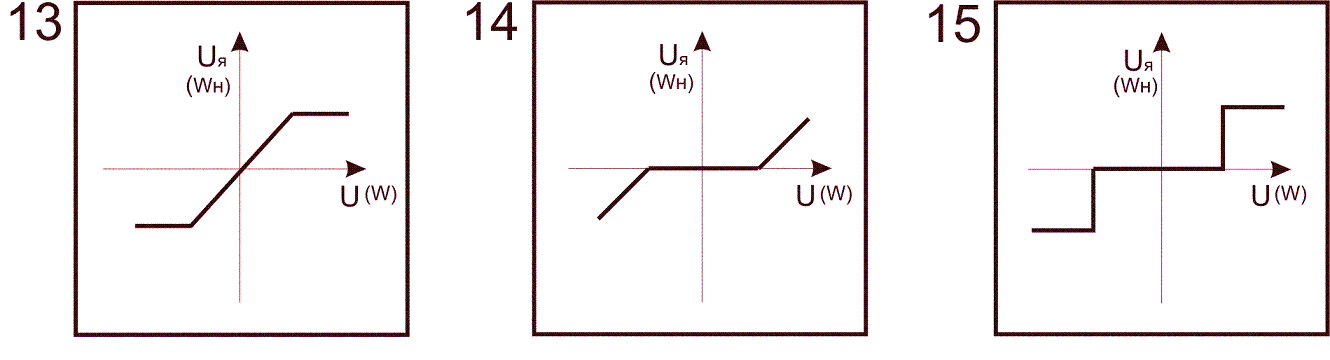
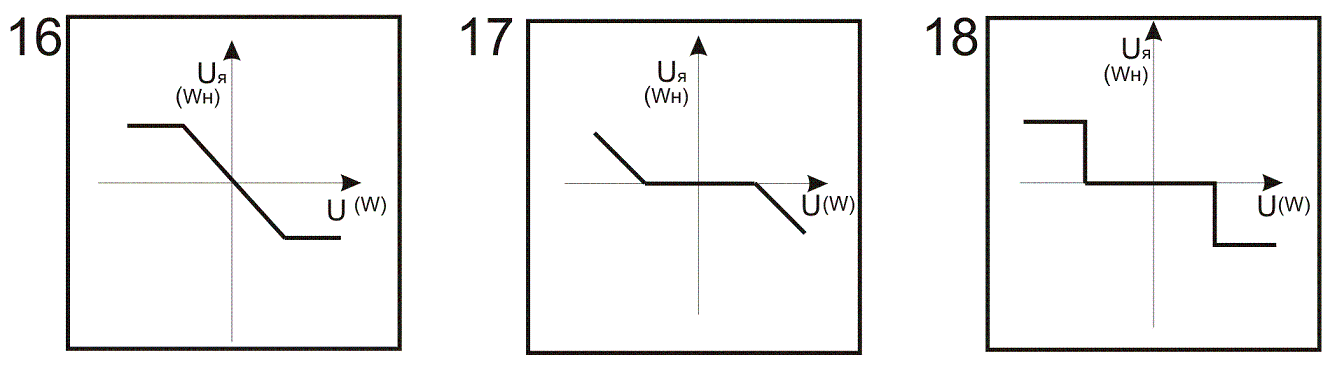
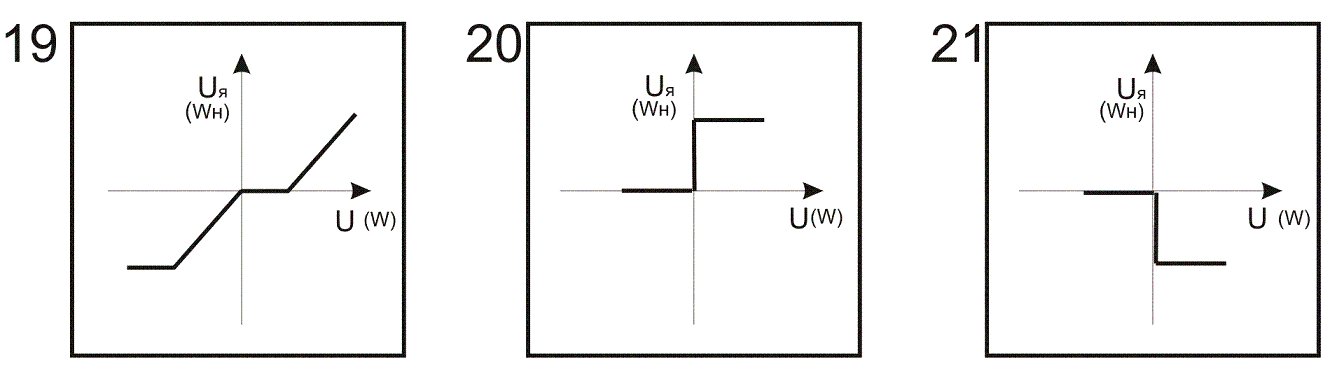
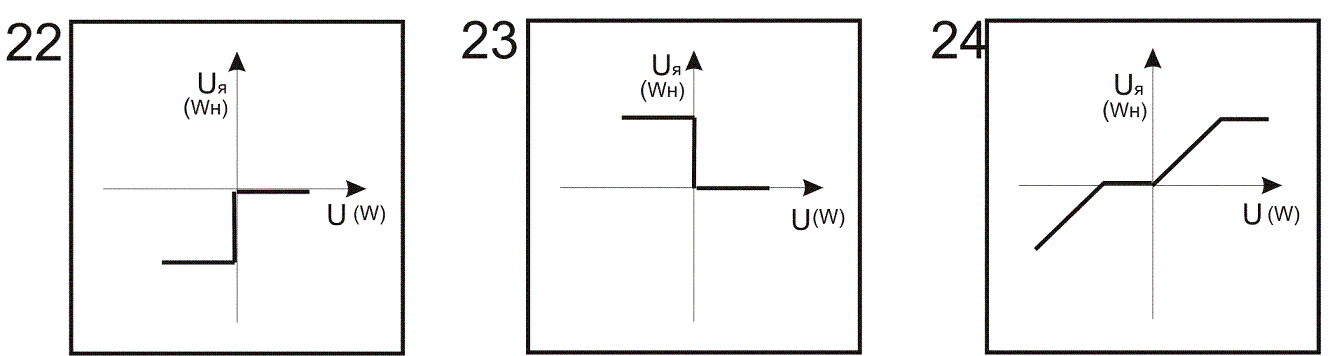

Продолжение рисунке А.1 – Варианты общего вида для нелинейного звена
ПРИЛОЖЕНИЕ Б