

1.3 Указания к составлению отчёта
Отчёт по работе должен содержать: структурную схему исследуемой системы; схему, построенную в среде MatLab Simulink; переходные процессы скорости и тока при моделировании по структурной схеме; систему разностных уравнений, составленных по структурной схеме при заданных значениях параметров; переходные процессы скорости и тока, полученные при моделировании по разностным уравнениям в среде программирования; выводы по каждому из методов моделирования и в целом по работе.
1.5 Контрольные вопросы
1. Как влияет нелинейное звено на характеристики системы в установившемся и переходном режимах?
2. Какой метод численного решения дифференциальных уравнений применён при моделировании систем в Delphi 7?
3. Опишите применение метода Рунге-Кутта для моделирования по дифференциальным уравнениям.
4. Что происходит при повышении пределов нечувствительности нелинейного звена и при изменении его вида? Проверить результаты на модели.
Лабораторная работа № 2 моделирование двигателя переменного тока
2.1 Общая постановка задачи
Целью работы является изучение методов построения цифровой модели двигателя переменного тока (синхронного и асинхронного) при помощи среды моделирования MatLab Simulink, а так же изучение методов расчёта параметров двигателя по паспортным данным. В описании к работе приводится Алгоритм расчёта параметров асинхронного двигателя и его математические модели в различных системах отсчёта.
Необходимо составить модель двигателя переменного тока (нечётный вариант – асинхронный с короткозамкнутым ротором, чётный вариант – синхронный). Варианты заданий приведены в приложении Б в таблицах Б.1 и Б.2. В данных таблицах выписаны паспортные данные на двигатели. Для моделирования необходимо провести расчёт остальных параметров двигателя (не каталожных). Итогом моделирования должен быть переходный процесс скорости двигателя при отсутствии нагрузки и при номинальной нагрузке.
2.2 Краткие теоретические сведения
Для составления модели двигателя необходимо рассчитать параметры схемы замещения по паспортным величинам:
-
Номинальный ток фазы статора, А:
![]() ,
,
где
![]() – номинальная мощность двигателя;
– номинальная мощность двигателя;
![]() – номинальное действующее фазное
напряжение.
– номинальное действующее фазное
напряжение.
-
Номинальное скольжение:
![]() ,
,
где
![]() – синхронная скорость вращения;
– синхронная скорость вращения;
![]() – номинальная скорость вращения.
– номинальная скорость вращения.
-
Синхронная угловая скорость, рад/с:
![]()
-
Номинальная угловая скорость, рад/с:
![]()
-
Номинальный момент на валу АД, Н*м:
![]()
-
Номинальные потери мощности, Вт:
![]()
-
Механические и добавочные потери мощности, Вт:
Принимаем механические потери мощности в пределах
![]() ,
,
и добавочные потери, связанные с вращением ротора
![]() ,
,
-
Момент холостого хода АД:
![]()
-
Номинальный электромагнитный момент:
![]()
-
Номинальные потери в роторе:
![]()
-
Коэффициент загрузки, соответствующий максимуму КПД (принимается предварительно):
![]()
-
Номинальные переменные потери мощности:
![]() ,
,
-
Постоянные потери:
![]()
-
Номинальные переменные потери мощности в статоре:
![]()
-
Активное сопротивление фазы статора:
![]()
-
Максимальный электромагнитный момент:
![]()
-
Коэффициент b, имеющий размерность сопротивления:
![]()
-
Полное сопротивление статора:
![]()
-
Приведённое активное сопротивление ротора:
![]()
-
Индуктивное сопротивление короткого замыкания:
![]()
-
Критическое скольжение:
![]()
-
Отношение активных сопротивлений:
![]()
-
Номинальный момент двигателя (при номинальном скольжении):
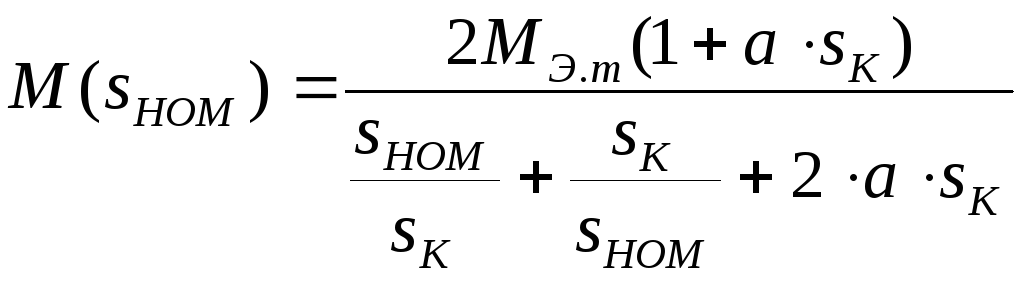
-
Погрешность при вычислении номинального момента:
![]()
Если погрешность превышает допустимую
величину, то корректируется коэффициент
загрузки
![]() и
и
![]() и повторяется процесс расчёта до
получения требуемой погрешности.
и повторяется процесс расчёта до
получения требуемой погрешности.
-
Индуктивные сопротивления статора и ротора:
![]()
-
Ток холостого хода:
Если
![]() :
:
![]()
Если:
![]() :
:
![]()
-
Потери в стали:
![]()
-
Эквивалентное сопротивление потерь в стали:
![]()
-
Индуктивное сопротивление взаимоиндукции:
![]()
-
Взаимная индуктивность:
![]() ,
,
где
![]() – номинальная частота питающей сети.
– номинальная частота питающей сети.
-
Коэффициент вязкого трения:
![]() ,
,
где
![]() – механические потери (
– механические потери (![]() и
и
![]() – фазные значения номинального тока и
напряжения).
– фазные значения номинального тока и
напряжения).