

Вопрос4: Полярные координаты. Связь между прямоугольными и полярными координатами.
Пусть точка М на плоскости задана так, что (см. Рис.5)
Г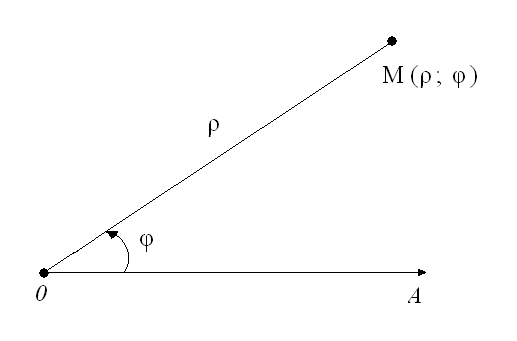 де
точка 0 – полюс, луч 0А – полярная ось,
де
точка 0 – полюс, луч 0А – полярная ось,
 - полярный радиус, φ – полярный угол
(полярный угол, как и во всей математике
отсчитывается против часовой стрелки
от положительного направления оси – в
нашем случае от направления полярной
оси).
- полярный радиус, φ – полярный угол
(полярный угол, как и во всей математике
отсчитывается против часовой стрелки
от положительного направления оси – в
нашем случае от направления полярной
оси).
Если совместить две системы координат (полярную и ПДСК) так, чтобы: они имели общее начало – точку 0, положительное направление полярной оси совпало с положительным направлением оси 0x (см. Рис.6), то будет понятно – как связаны ПДСК и полярная системы координат.
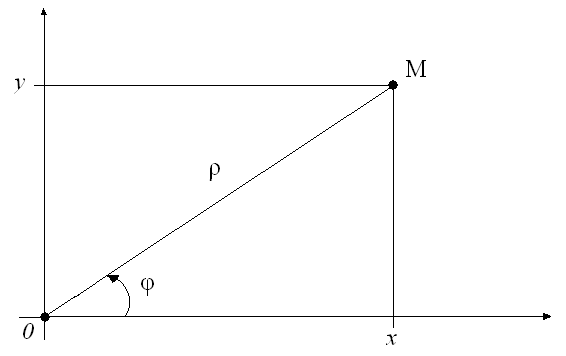

Для большего удобства переходов ПДСК-полярная и обратно сформируем таблицу.
Таблица взаимосвязи ПДСК и полярной системы координат
Выражение декартовых координат через полярные |
Выражение полярных координат через декартовы |
|
|
|
|




Решение:
Координаты точек заданы в полярных координатах, а выражение для нахождения получено для точек, заданных в ПДСК, а потому, прежде всего, необходимо выразить координаты точек в ПДСК.
Из таблицы взаимосвязи
полярных и декартовых координат получаем,
что для точки

 ,
,
или, координаты
точки М в ПДСК -
 .
.
Аналогично находим и координаты точки N:
 ,
,
или, координаты
точки N
в ПДСК -
 .
.
А вот теперь, окончательно, используя результат «расстояние между двумя точками на плоскости», получаем, что
Вопрос 5: Преобразования прямоугольных координат – параллельный сдвиг осей, поворот осей координат.
Ах +2Вху+Су+2Вх+2Уу+F=0 – Общее уравнение линий 2 порядка.
Рассмотрим три типа преобразований:
а) параллельный перенос;
б) поворот;
в) зеркальное отражение в оси абсцисс (изменение направления оси ординат на противоположное).
В каждом случае
координаты точки в старой
![]() и
новой
и
новой
![]() системах
координат связаны формулой (2.8). Поэтому
достаточно найти вектор
системах
координат связаны формулой (2.8). Поэтому
достаточно найти вектор
![]() переноса
начала координат и матрицу
переноса
начала координат и матрицу
![]() перехода
от базиса
перехода
от базиса
![]() к
базису
к
базису
![]() .
.
а) При параллельном
переносе системы координат (рис.2.11,а)
базис не изменяется, поэтому матрица
перехода является единичной:
![]() .
Находим координаты вектора переноса
начала координат:
.
Находим координаты вектора переноса
начала координат:
![]() .
Тогда формулу (2.8) можно записать в виде
.
Тогда формулу (2.8) можно записать в виде
![]()
б) При повороте
системы координат на угол
![]() (рис.2.11,6)
начало
(рис.2.11,6)
начало
![]() новой
системы координат совпадает с началом
новой
системы координат совпадает с началом
![]() старой,
поэтому вектор переноса нулевой:
старой,
поэтому вектор переноса нулевой:
![]() .
Разлагая новые базисные векторы
по
старому базису, получаем
.
Разлагая новые базисные векторы
по
старому базису, получаем
![]() ,
,
![]() .
Составим матрицу перехода, записывая
координаты векторов
по
столбцам:
.
Составим матрицу перехода, записывая
координаты векторов
по
столбцам:
![]() .
Тогда формулу (2.8) можно записать в виде
.
Тогда формулу (2.8) можно записать в виде
δ=(2D)/4А + (2Е)/4С - F
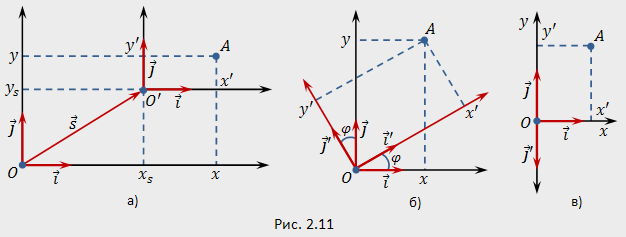
в) При зеркальном
отражении в оси абсцисс (изменении
направления оси ординат на противоположное)
(рис.2.11,в) начало
новой
системы координат совпадает с началом
старой,
поэтому вектор переноса нулевой:
.
Разлагая новые базисные векторы
![]() по
старому базису, получаем
по
старому базису, получаем
![]() (так
как
(так
как
![]() ),
),
![]() или
или
![]() .
Составим матрицу перехода, записывая
координаты векторов
по
столбцам:
.
Составим матрицу перехода, записывая
координаты векторов
по
столбцам:
![]() .
Тогда формулу (2.8) можно записать в виде
.
Тогда формулу (2.8) можно записать в виде
![]() .
.
Вопрос 6: Прямая на плоскости. Общее уравнение прямой, неполное уравнение первой степени.
Уравнением линии (кривой) на плоскости ОХУ называется уравнение, которому удовлетворяют все точки, принадлежащие этой линии, и не удовлетворяют координаты точки, не лежащие на этой линии.
Общее уравнение плоскости
Вообще, любое уравнение вида
A∙x + B∙y + C∙z + D = 0
определяет плоскость (где А, В и С – координаты вектора-нормали к плоскости). Такая форма уравнения плоскости получила название «общее уравнение плоскости».