

4. Вторая основная задача динамики точки и ее решение
Задача заключается в следующем: зная действующие на точку силы, ее массу и начальные условия движения, определить закон движения точки или какие-либо другие ее кинематические характеристики.
Начальные
условия движения точки в декартовых
осях – это координаты точки
 и
проекции начальной скорости
и
проекции начальной скорости
 на
оси
на
оси
 и
и
 в
момент времени, соответствующий началу
движения точки и принимаемый равным
нулю.
в
момент времени, соответствующий началу
движения точки и принимаемый равным
нулю.
Решение задач этого типа сводится к составлению дифференциальных уравнений (или одного уравнения) движения материальной точки и их последующему решению путем непосредственного интегрирования или с использованием теории дифференциальных уравнений.
5. Виды колебаний материальной точки. Свободные колебания
Колебание или колебательное движение материальной точки – это повторяющееся во времени движение точки около своего положения равновесия в двух противоположных направлениях.
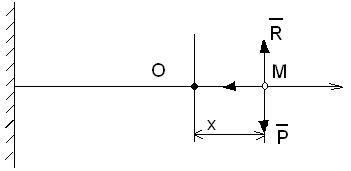
Колебания материальной точки могут быть линейные и нелинейные, большие или малые. Будем изучать только линейные колебания точки. Колебания материальной точки могут быть: свободными, затухающими и вынужденными. Свободные колебания возникают в тех случаях, когда отсутствует сопротивление среды. В дальнейшем будем предполагать, что сила упругости, действующая на материальную точку, пропорциональна ее отклонению от положения равновесия. Силу упругости будем моделировать пружиной. Модель свободных колебаний точки:

 ,
где с-жесткость пружины.
,
где с-жесткость пружины.
Если
шарик в процессе движения, отклоняется
от равновесия, на него действует сила
упругости
 ,
которая стремится вернуть шарик в
положение равновесия и поэтому называется
восстанавливающей силой.
,
которая стремится вернуть шарик в
положение равновесия и поэтому называется
восстанавливающей силой.
Для определения кинематического уравнения движения точи М, необходимо решить вторую задачу динамики точки, т. е. проинтегрировать уравнение.
 или
или
 .
(3.6.1)
.
(3.6.1)
Получим
 (3.6.2)
– дифференциальное уравнение свободных
колебаний точки.
(3.6.2)
– дифференциальное уравнение свободных
колебаний точки.
Где
 (3.6.3)
– циклическая частота свободных
колебаний точки.
(3.6.3)
– циклическая частота свободных
колебаний точки.
Выражение (3.6.2) представляет собой линейное однородное уравнение второго порядка с постоянными коэффициентами.
Поэтому его решение надо искать в виде экспоненты:
 ,
, (3.6.4)
(3.6.4)
 .
(3.6.5)
.
(3.6.5)
Подставляем (3.6.4) и (3.6.5) в (3.6.2), получаем;
 ,
,
 (3.6.6)
– характерное уравнение для (3.6.2). Корни
уравнения (3.6.6) являются мнимыми:
(3.6.6)
– характерное уравнение для (3.6.2). Корни
уравнения (3.6.6) являются мнимыми:
 .
(3.6.7)
.
(3.6.7)
Общее решение дифференциального уравнения (3.6.2) имеет вид:
 .
(3.6.7)
.
(3.6.7)
Для
определения постоянных интегрирования
 и
и
 продифференцируем по времени (3.6.7) и из
полученного выражения и уравнения
(3.6.7) с учетом начальных условий движения
при
продифференцируем по времени (3.6.7) и из
полученного выражения и уравнения
(3.6.7) с учетом начальных условий движения
при
 находим
находим
 ;
;
 .
.
Запишем решение (3.6.2) в амплитудной форме, для чего введем следующую подстановку:
 ,
,
 (3.6.8)
(3.6.8)
С учетом этого (3.6.7) примет вид
 ,
(3.6.9)
,
(3.6.9)
где
 –
фаза
колебаний;
–
фаза
колебаний;
 –
начальная
фаза колебаний.
–
начальная
фаза колебаний.
К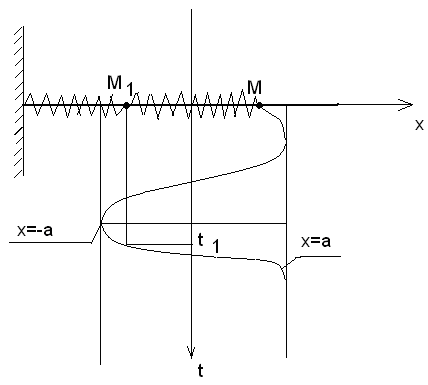 олебания,
совершаемые по законам (3.6.7) или (3.6.9)
называются гармоническими.
Изобразим график свободных колебаний
точки, основываясь на (3.6.9).
олебания,
совершаемые по законам (3.6.7) или (3.6.9)
называются гармоническими.
Изобразим график свободных колебаний
точки, основываясь на (3.6.9).
Величина a, представляющая наибольшее отклонение точки М от положения равновесия, называется амплитудой колебания.
 .
.
Свойства свободных колебаний;
1) Частота и период свободных колебаний не зависит от начальных условий движения, и являются неизменными характерными условиями колеблющейся системы.
2) Амплитуда и начальная фаза свободных колебаний определяются начальными условиями движения.
3) Если на материальную точку действует постоянная сила, направленная вдоль ее движения, то кинематические характеристики движения (k,t,a, ) не изменяются, а лишь смещаются по направлению силы в центр колебаний на величину так называемого статического смещения.