

24. Кинетическая энергия системы материальных точек. Теорема Кенига
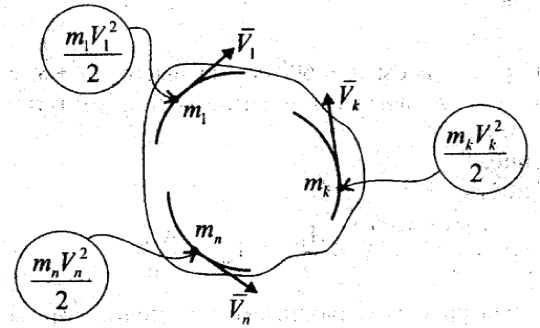
Кинетическая энергия механической системы – арифметическая сумма кинетических энергий всех материальных точек этой системы:
 .
.
Кинетическая энергия системы, состоящей из n связанных между собой тел, равна арифметической сумме кинетических энергий всех тел этой системы:
 .
.
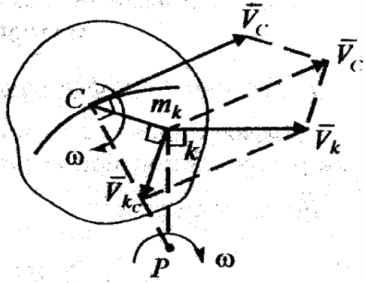
Кинетическая энергия механической системы в общем случае ее движения определяется теоремой Кенига:
Кинетическая энергия механической системы равна сумме кинетической энергии движения системы вместе с центом масс и кинетической энергии системы при ее движении относительно центра масс:
 ,
,
где
 – скорость k-й
точки системы относительно центра масс.
– скорость k-й
точки системы относительно центра масс.
25. Кинетическая энергия твердого тела
Рассмотрим вычисление кинетической энергии твердого тела в частных случаях его движения:
1 .
Поступательное
движение.
При поступательном движении тела
.
Поступательное
движение.
При поступательном движении тела
 .
В этом случае
.
В этом случае
 .
.
2 .
Вращение
тела вокруг неподвижной оси.
В этом случае
.
Вращение
тела вокруг неподвижной оси.
В этом случае
 ,
,
где
 –
момент инерции тела относительно оси
вращения.
–
момент инерции тела относительно оси
вращения.
3. Плоскопараллельное движение.
При
плоском движении тела кинетическая
энергия складывается из кинетической
энергии поступательного движения тела
со скоростью центра масс
 и кинетической энергии вращательного
движения вокруг оси, проходящей через
центр масс,
и кинетической энергии вращательного
движения вокруг оси, проходящей через
центр масс,
 :
:
 .
.
Плоскопараллельное
движение эквивалентно мгновенному
вращению вокруг оси, проходящей через
МЦС. Поэтому
 .
С учетом этого, получим
.
С учетом этого, получим
 ,
,
где
 –
теорема Гюйгенса-Штейнера. Тогда
–
теорема Гюйгенса-Штейнера. Тогда
 .
.
26. Теорема об изменении кинетической энергии системы
Теорема об изменении кинетической энергии механической системы в дифференциальной форме:
1. Дифференциал кинетической энергии механической системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на эту систему:
 ,
,
где
 –
сумма элементарных работ внешних сил,
действующих на систему,
–
сумма элементарных работ внешних сил,
действующих на систему,
 –
сумма элементарных работ внутренних
сил.
–
сумма элементарных работ внутренних
сил.
2. Производная по времени от кинетической энергии системы равна мощности всех внешних и внутренних сил, действующих на эту систему:
 .
.
Теорема об изменении кинетической энергии механической системы в интегральной или конечной форме:
Изменение кинетической энергии механической системы на некотором перемещении равно сумме работ внешних и внутренних сил, действующих на материальные точки системы на этом перемещении:
 .
.
Учитывая, что сумма работ внутренних сил твердого тела на любом перемещении равна нулю, получим
 .
.
Теорему об изменении кинетической энергии применяют в тех случаях, когда движущаяся система является неизменной, т.е. расстояние между точками системы остается неизменным. Частным случаем такой системы является абсолютно твердое тело.
Эту теорему целесообразно применять в тех случаях, когда в число данных и искомых величин входят массы или моменты инерции тел, скорости (линейные или угловые), а силы и моменты пар сил либо постоянны, либо зависят от положения точек тела.
27. Вычисление работы сил, действующих на твердое тело
1. Работа внутренних сил.
Д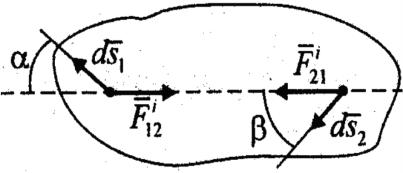 ля
двух k-х
точек:
ля
двух k-х
точек:
 ,
т.к.
,
т.к.
 и
и
 .
.
Элементарная
работа
всех внутренних сил в твердом теле равна
нулю:
 .
.
Следовательно, на любом конечном перемещении тела
 .
.
2. Работа внешних сил.
а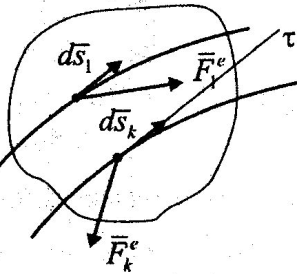 )
Поступательное
движение тела:
)
Поступательное
движение тела:
Элементарная работа k-й силы
 .
.
Для
всех сил
 .
.
Т.к.
при поступательном движении
 ,
то
,
то
 ,
,
где – проекция главного вектора внешних
сил на направление перемещения.
– проекция главного вектора внешних
сил на направление перемещения.
Работа сил на конечном перемещении S
 .
.
б) Вращение тела вокруг неподвижной оси.
Э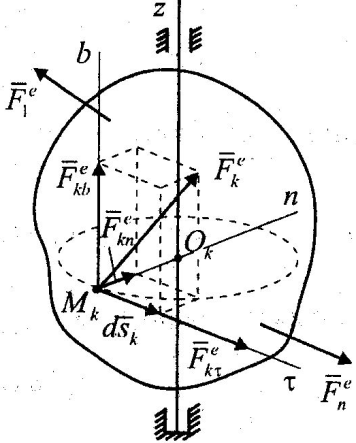 лементарная
работа k-й силы
лементарная
работа k-й силы
 ,
,
где
 –
составляющие силы
по естественным осям
–
составляющие силы
по естественным осям
 .
.
Т.к.
 ,
то работа этих сил на перемещении
,
то работа этих сил на перемещении
 точки приложения силы равна нулю. Тогда
точки приложения силы равна нулю. Тогда
 .
.
Элементарная
работа k-й
внешней силы
равна произведению момента этой силы
относительно оси вращения
 на элементарный угол поворота
на элементарный угол поворота
 тела вокруг оси.
тела вокруг оси.
Элементарная работа всех внешних сил
 .
.
где
 –
главный момент внешних сил относительно
оси.
–
главный момент внешних сил относительно
оси.
Работа сил на конечном перемещении
 .
.
Если
 ,
то
,
то
 ,
,
где
 –
конечный угол поворота;
–
конечный угол поворота;
 ,
,
 –
число оборотов тела вокруг оси.
–
число оборотов тела вокруг оси.