

-
– Схема проливочного стенда
Исследования расходомера проводились в его рабочем диапазоне массового расхода при различных значениях объемной доли воздуха в жидкости (gas void fraction, GVF). В таблице Таблица 1.5.2.2 представлены значения массового расхода и GVF, для которых были получены экспериментальные данные.
-
– Параметры эксперимента
|
Параметр |
Значение |
|
Массовый расход, кг/с |
0.3; 0.5; 0.6; 0.8 |
|
GVF, % |
0; 2; 4; 6; 8; 10; 15; 20; 25 |
Прочие параметры эксперимента: время
наблюдения
 ,
частота возбуждения трубок расходомера
,
частота возбуждения трубок расходомера
 Гц, частота дискретизации АЦП
Гц, частота дискретизации АЦП
 .
.
По полученным записям экспериментальных данных с измерительных катушек расходомера осуществлялся расчет параметров измерительных сигналов и вычисление расхода. Кроме того, параллельно осуществлялась запись рассчитанных значений параметров сигнала с помощью встроенных алгоритмов цифрового трансмиттера.
Таким образом, для исследования методов оценки расхода доступны следующие данные:
-
сигналы с измерительных катушек расходомера;
-
параметры измерительных сигналов, рассчитанные по алгоритмам используемого цифрового трансмиттера;
-
значения расхода, полученные при помощи алгоритмов цифрового трансмиттера;
-
эталонные значения расхода, GVF, температуры и других величин, задаваемых и контролируемых на испытательном стенде.
-
Выводы
-
РАЗРАБОТКА АЛГОРИТМА ОБРАБОТКИ СИГНАЛОВ И ОЦЕНКИ ИХ ПАРАМЕТРОВ
-
Постановка задачи
-
В практических реализациях кориолисовых расходомеров широкое распространение получил метод переходов через ноль (digital zero-crossing method). Метод обеспечивает относительную погрешность оценки расхода 0.1% для однофазного потока обеспечивает []. Кроме того, метод исключительно прост в реализации.
(дополнить)
-
Разработка алгоритма оценки параметров измерительных сигналов в условиях двухфазного потока
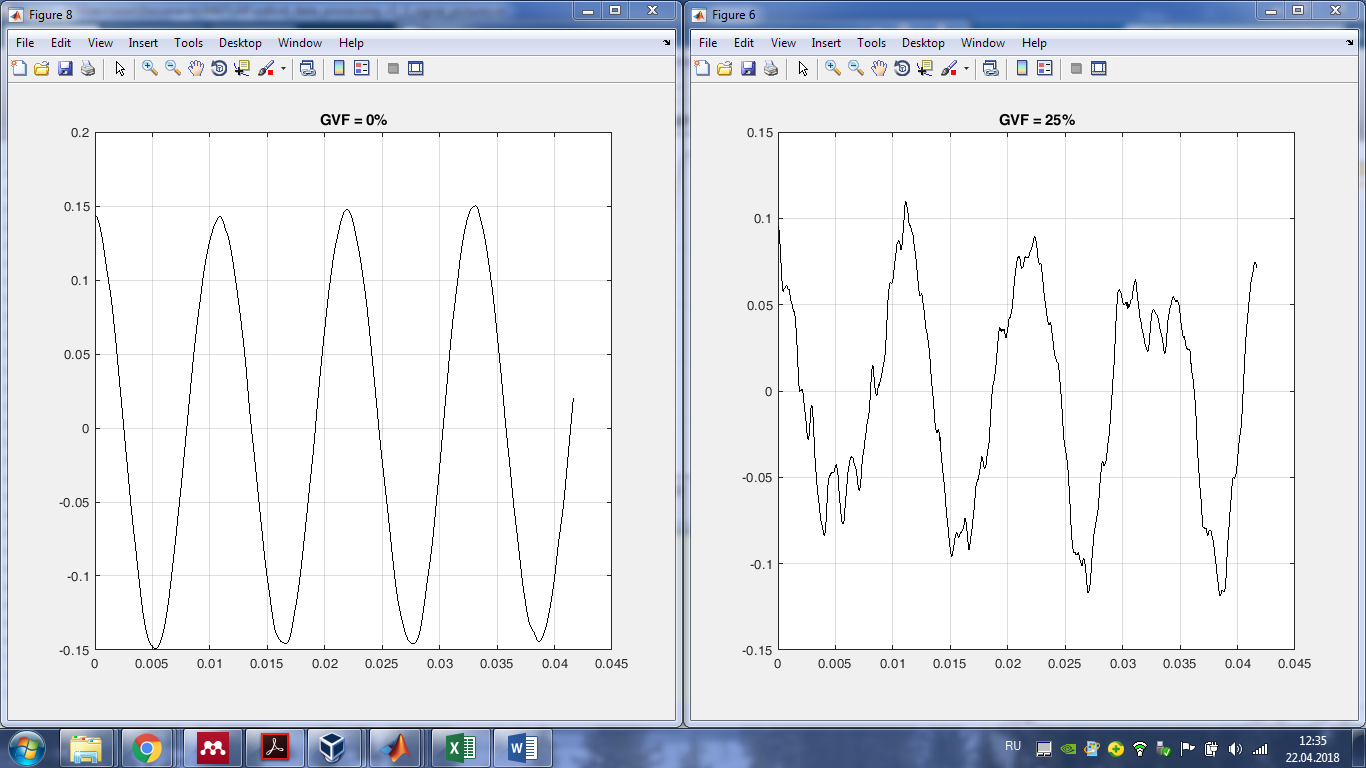
В условиях двухфазного потока форма измерительных сигналов расходомера значительно искажается, как показано на рисунке Рисунок 2.2.1.1.1. Искажение формы сигналов приводит к возникновению ложных переходов через ноль.


а) б) в)
-
– Вид измерительных сигналов при высоком gvf
Здесь а) – чистый измерительный сигнал при GVF = 0, б) – зашумленный измерительный сигнал расходомера при GVF = 25%, в) ложные переходы через ноль, возникающие при зашумленном сигнале.
Наличие ложных переходов через ноль создает неоднозначность входных данных для метода и приводит либо к сбою алгоритма, либо к ошибочном расчету параметров сигналов. Рисунок 2.2.1.1.2 иллюстрирует зависимость числа ложных переходов от содержания GVF, полученную для экспериментальных данных (см. раздел 1.5).

-
– Зависимость числа ложных переходов от gvf
Здесь длина экспериментального сигнала 1 с, что соответствует при частоте колебаний трубок 90 Гц примерно 180 переходам через ноль. При этом видим, что с ростом GVF число ложных переходов возрастает. Данный эффект особенно сильно проявляется при значения расхода близком к верхней границе диапазона измерений расходомера.
Для компенсации ложных переходов обычно используют два подхода или их комбинацию:
-
исключение аномальных значений времен переходов через ноль или аномальных значений полученных параметров (например, [zhang et al.]);
-
предварительная фильтрация измерительных сигналов ([], [], []).
Очевидный недостаток первого подхода – потеря информации в результате исключения значений параметров измерительных сигналов с неадекватными значениями. Неадекватность значений вызвана расчетом параметров по ложным переходам через ноль. В результате время ожидания следующего перехода через ноль расчета значения параметра приводи к возрастанию задержки между получением измерительных сигналов и оценкой их параметров. С учетом того, что оценка значений частоты обычно используется в качестве сигнала обратной связи для управления расходомером, отсутствие актуального значения частоты приводит к срыву резонансной частоты колебаний трубок расходомера. Также большое количество последовательно возникающих ложных переходов через ноль приводит к сбою алгоритма оценки параметров и нарушению работы расходомера в целом.
Очевидный недостаток второго метода – внесение дополнительной задержки при оценке параметров измерительных сигналов. Использование фильтра позволяет подавить шумовые компоненты и предотвратить возникновение ложных переходов через ноль. Однако, оценка параметров происходит с задержкой, которая обусловлена постоянной времени фильтра. Поэтому, при быстро меняющихся измерительных сигналах в условиях двухфазного потока также возникает срыв резонансной частоты колебаний трубок расходомера.
Кроме описанных недостатков, метод переходов через ноль не позволяет напрямую оценивать амплитуду измерительных сигналов. Поэтому в [], например, для оценки амплитуды использовали преобразование Фурье.
Вопрос о выборе типа фильтра ранее подробно не исследовался. Например, в [] использовался эллиптический БИХ фильтр, в работах [] и [] о применении фильтра, но его тип не обозначается.
Для решения описанных проблем была разработана модификация метода переходов через ноль, которая обладает следующими свойствами:
-
обеспечивает устойчивость метода переходов через ноль при большом числе ложных переходов;
-
позволяет выявлять ложные переходы через ноль, фильтровать их и осуществлять оценку параметров измерительных сигналов на основании правильных переходов через ноль;
-
позволяет оценивать амплитуду измерительных сигналов.
Описание разработанной модификации переходов через ноль и алгоритмическая реализация представлены в разделе Error: Reference source not found.
Кроме того, был рассмотрен вопрос применения предварительного фильтра, осуществлен подбор фильтра и оценка качества определения параметров модельного сигнала при разных типах фильтров. Результаты представлены в разделе .
Модификация алгоритма переходов через ноль состоит из нескольких последовательных шагов:
1) определение отсчетов сигналов, которые формируют переход через ноль;
2) восстановление точки перехода через ноль;
3) при наличии ложных переходов через ноль – фильтрация ложных переходов;
4) расчет параметров измерительных сигналов.
Рассмотрим особенности реализации алгоритма на каждом его шаге.
Измерительные сигналы представлены в
виде дискретных отсчетов АЦП и ситуация,
когда отсчет АЦП точно попадает на
переход через ноль встречается редко.
Поэтому возникает задача восстановления
точного значения времени перехода через
ноль по дискретным отсчетам. На рисунке
Рисунок 2.2.1.1.3 показано расположение и
порядок индексации точек дискретных
измерительных сигналов, где
 – последовательные отсчеты левого и
правого измерительных сигналов
соответственно.
– последовательные отсчеты левого и
правого измерительных сигналов
соответственно.
