

-
– Восстановление точного значения времени перехода через ноль
Для приближения исходной кривой по дискретным отсчетам применяют линейную или квадратичную интерполяцию []. С целью сокращения вычислительных затрат и повышения надежности алгоритма использована линейная интерполяция по двум точкам, которые формируют переход через ноль и могут быть получены исходя из соотношения:
 11\* MERGEFORMAT ()
11\* MERGEFORMAT ()
где
 – последовательные отсчеты левого/правого
измерительных сигналов.
– последовательные отсчеты левого/правого
измерительных сигналов.
Для вычисления точного времени перехода через ноль используется линейная интерполяция по двум отсчетам сигнала, уравнение которой определяется известным соотношением:
 22\* MERGEFORMAT ()
22\* MERGEFORMAT ()
где
 – отсчет времени, соответствующий
отсчету сигнала
– отсчет времени, соответствующий
отсчету сигнала
 ,
,
 – значение непрерывного времени,
– значение непрерывного времени,
 – значение непрерывного сигнала
– значение непрерывного сигнала
Преобразуя 2, получим:
 33\* MERGEFORMAT ()
33\* MERGEFORMAT ()

Тогда для нахождения времени перехода через ноль достаточно найти решение уравнения 3, которое имеет вид
 44\* MERGEFORMAT ()
44\* MERGEFORMAT ()
где
 – искомое время перехода через ноль.
По формуле 4 могут быть рассчитаны
значения времен переходов для левого
и правого измерительных сигналов
– искомое время перехода через ноль.
По формуле 4 могут быть рассчитаны
значения времен переходов для левого
и правого измерительных сигналов
 и
и
 соответственно.
соответственно.
Возникновение ложных переходов через
ноль вызвано искажениями измерительных
сигналов, рисунок Рисунок 2.2.1.1.4
иллюстрирует ложных переходов в одном
из измерительных сигналов. В результате
для искаженного сигнала будет рассчитано
несколько значений времен переходов
через ноль –
 ,
где
,
где
 – число ложных переходов.
– число ложных переходов.

-
– Ложные переходы в левом измерительном сигнале
Методика фильтрации ложных переходов основана на совместном рассмотрении двух измерительных сигналов. При рассмотрении сигналов вводится гипотеза о том, что ложные переходы для текущего момента времени присутствуют только в одном сигнале. Ситуация появления ложных переходов в двух сигналах одновременно полагается маловероятной.
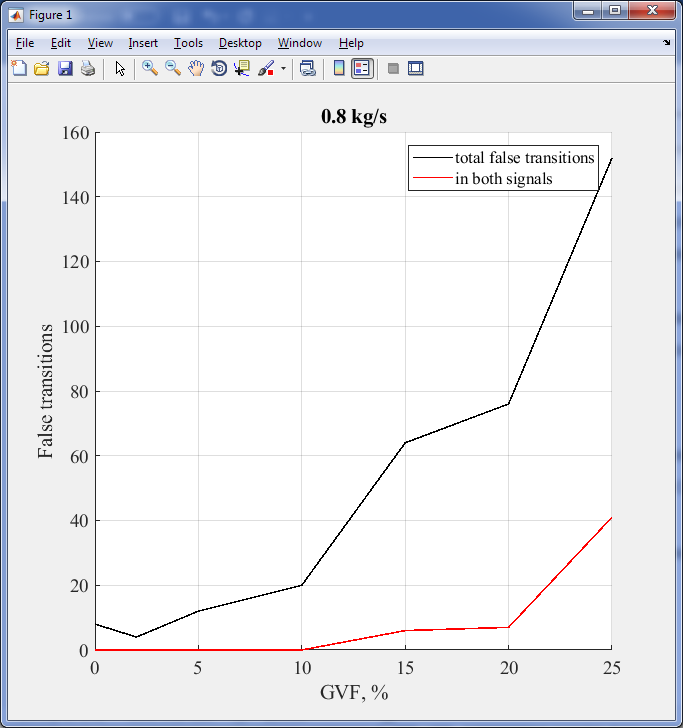
Для проверки данной гипотезы проведен анализ расположения ложных переходов для тех же экспериментальных сигналов, которые использовались для оценки числа ложных переходов на рисунке Рисунок 2.2.1.1.2. Анализ расположения ложных переходов представлен на рисунке Рисунок 2.2.1.1.5.
-
– Анализ расположения ложных переходов в измерительных сигналах
На рисунке Рисунок 2.2.1.1.5 показано, что число ложных переходов в обоих сигналах одновременно значительно меньше, чем общее число ложных переходов в сигналах. Следовательно, можно сделать заключение о справедливости выдвинутой гипотезы.
С учетом гипотезы был разработан критерий
выбора истинного перехода через ноль
для искаженного сигнала. Обозначим
набор переходов
 как:
как:
 55\* MERGEFORMAT ()
55\* MERGEFORMAT ()
где
 – массив переходов через ноль в искаженном
сигнале,
– массив переходов через ноль в искаженном
сигнале,
 – число ложных переходов
– число ложных переходов
Критерий истинного перехода через ноль
– минимум расстояния
 между временной разностью на
между временной разностью на
 шаге
шаге
 ,
рассчитанной по всем переходам из
массива
,
рассчитанной по всем переходам из
массива
 ,
и
,
и
 шаге
шаге
 :
:
 66\* MERGEFORMAT ()
66\* MERGEFORMAT ()
где
 77\* MERGEFORMAT ()
77\* MERGEFORMAT ()
Переход
с индексом
 ,
при котором достигается минимум критерия
,
при котором достигается минимум критерия
 – искомый истинный переход через ноль.
– искомый истинный переход через ноль.
Разработанная реализация модифицированного алгоритма оценки параметров по переходам через ноль состоит из нескольких функциональных блоков. Блок схема алгоритма представлена на рисунке Рисунок 2.2.1.1.6.
Вход алгоритма – дискретные отсчеты измерительных сигналов, выход алгоритма – оценки разности фаз, частоты и амплитуды каждого сигнала. Далее определяются точки переходов через ноль и осуществляется фильтрация при наличии ложных переходов через ноль. После этого осуществляется расчет параметров сигналов, перерасчет ширины окна. Выход алгоритма – параметры измерительных сигналов: phd – разность фаз; f_L и f_R – частоты измерительных сигналов; A_L и A_R – амплитуды измерительных сигналов, ширина окна w и точки расположения окна ws.
(дополнить описание алгоритма, из отчета)
