

6.2. Псевдовектор бесконечно малого поворота
|
|
При
повороте тела на угол dφ, вводят
псевдовектор бесконечно малого
поворота
|

6.3. Угловая скорость, сравните с (3.8).
|
|
6.4. Угловое ускорение (сравните с 3.10) .
|

 ,
или
,
или

6.5. Связь линейной скорости материальной точки твердого тела и угловой скорости
|
|
откуда
|

6.6. Связь линейного ускорения материальной точки твердого тела с угловой скоростью и угловым ускорением Продифференцируем (6.5) по времени:
![]() ,
,
![]() ,
,
из
(3.10.1)
![]() ,
используя(6.4)
,
используя(6.4)
![]() .
.
Из
(3.10.1)
![]() ,
заменяя
,
заменяя![]() ,(6.5),
получим
,(6.5),
получим
![]() .
.
7. Динамика вращательного движения
7.1. Работа при вращательном движении. Момент силы

Из (5.3.2):
![]() ,
,
![]() .
.
Mz - момент силы Ft относительно оси вращения z. В векторном виде:
![]() -
векторное произведение.
-
векторное произведение.
7.2. Кинетическая энергия при вращательном движении. Момент инерции
![]() .
.
![]() .
.
Iz - момент инерции твердого тела, относительно оси z.
Моментом инерции материальной точки Ii называется величина:
![]() .
.
Следовательно,
![]() .
.
Величина I зависит от положения оси вращения и от распределения масс в теле.
7.2.1. Теорема Штейнера

![]() ,
,
где I0 - момент инерции относительно оси OО, I - момент инерции относительно оси O'О'.
7.2.2. Моменты инерции I0 для некоторых тел
|
Обруч: |
|
где R - радиус обруча. |
|
Диск: |
|
где R - радиус диска. |
|
Шар: |
|
где R - радиус шара. |
|
Стержень: |
|
где l - длина стержня. |
|
|
|
m - масса тела. |
7.3. Уравнение динамики вращательного движения Из (5.5):
![]() .
.
Используем (7.1) и (7.2):
 .
.
Используем (6.3):
![]() ,
,
Откуда
![]() .
.
Получим основное уравнение динамики вращательного движения, сравнить с (4.6):
![]() .
.
7.4. Момент импульса абсолютно твердого тела Из (7.3):
![]() ,
или
,
или
 .
.
Введем момент импульса абсолютно твердого тела:
![]() .
.
В векторном виде для однородного симметричного тела:
![]() .
.
Закон изменения момента импульса со временем:
 ,
сравнить с (4.6)
,
сравнить с (4.6)
7.5. Закон сохранения момента импульса Из (7.4):
![]() ,
,
если
момент силы
![]() =
0, то:
=
0, то:
![]() .
.
Т.к.
![]() ,
то величина
,
то величина![]() будет
иметь одинаковые значения для любых
интересующих нас моментов времени, т.
е.:
будет
иметь одинаковые значения для любых
интересующих нас моментов времени, т.
е.:
 ;
;
или
![]() .
.
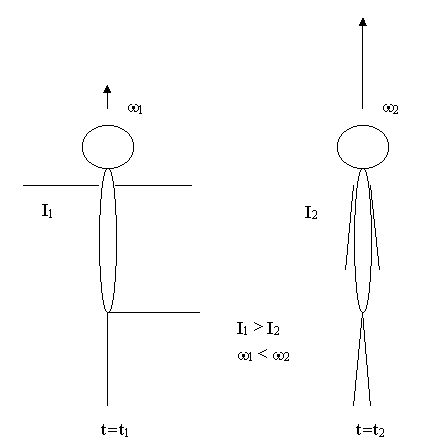
Вращающееся тело может изменить свой момент инерции, изменится и его угловая скорость, но при равенстве нулю суммарного момента внешних сил величина Izω останется постоянной. Пример - фигурист в "волчке".
![]()
8. Элементы специальной теории относительности
8.1. Преобразования Галилея - это уравнения, связывающие координаты и время некоторого СОБЫТИЯ в двух инерциальных системах отсчета. СОБЫТИЕ определяется местом, где оно произошло (координаты x, y, z), и моментом времени t, когда произошло событие. Событие полностью определено, если заданы четыре числа: x,y,z,t - координаты события.
Пусть материальная точка m в системе отсчета К в момент времени t имела координаты x, y, z, т.е. в системе К заданы координаты события - t, х, y, z.
Найдем
координаты t',
x', y', z'
этого события в системе отсчета К',
которая движется относительно системы
К
равномерно
и прямолинейно вдоль оси х со скоростью
![]() .
.
Выберем начало отсчета времени так, чтобы в момент времени t = 0 начала координат совпадали. Оси х и х' направлены вдоль одной прямой, а оси у и у', z и z' - параллельны.

Тогда из рисунка ОЧЕВИДНО:
x = x'+Vt .
Кроме того, ясно, что для наших систем координат
y = y', z = z'.
В механике Ньютона предполагается, что
t = t',
т.е. время течет одинаково во всех системах отсчета. Полученные четыре формулы и есть преобразования Галилея:
x = x' + Vt, y = y', z = z', t = t'.