

Относительность движения. Система отсчета.
Всякое движение является относительным, т.е. происходит относительно других тел или их частей.
Тело, относительно которого рассматривается движение, называется телом отсчета.
Д
Положение
любой точки тела (например, точки М,
рис. 1) задается ее радиус-вектором
![]() ,
проведенном из начала координат в эту
точку.
,
проведенном из начала координат в эту
точку.

![]()

0
Рис. 1
В декартовой системе координат такой радиус-вектор может быть представлен следующим образом:
=
![]() х
+
х
+
![]() y
+
y
+
![]() z
z![]()
где x, y, z – проекции вектора на оси координат x, y, z, а, , , - единичные векторы (орты координат), совпадающие по направлению с положительными направлениями осей координат. Модуль любого из этих векторов равен единице.
Отметим, что в общем случае вектор и его проекции на соответствующие оси координат являются функциями времени t.
Кинематика материальной точки
Кинематика изучает механическое движение тел без рассмотрения причин, его вызывающих.
Простейшим объектом кинематики является материальная точка, т.е. тело или частица материи, размерами которых можно пренебречь при описании их движения.
Представление о теле как о материальной точке справедливо, если характерный размер тела гораздо меньше характерного размера системы, в которой рассматривается движение. Например, Земля при орбитальном движении вокруг Солнца с хорошим приближением может рассматриваться как материальная точка, т.к. радиус Земли в 105 раз меньше радиуса земной орбиты.
Линия, которую описывает в процессе движения конец радиуса-вектора материальной точки, называется траекторией ( линия L на рис. 2).
Расстояние S, пройденное
материальной точкой вдоль траектории,
называется пройденным путем (на рис. 2
пройденный путь равен длине дуги АВ). Вектор,
соединяющий начальное и конечное
положение материальной точки на
траектории (вектор Δ
на рис. 2) называется перемещением.

Перемещение Δ равно приращению радиуса-вектора материальной точки
Δ
=![]() ,
,
где радиусы-векторы
![]() и
и
![]() отвечают начальному и конечному положению
материальной точки (рис.2).
отвечают начальному и конечному положению
материальной точки (рис.2).
Быстрота изменения положения материальной точки в пространстве характеризуется средней и мгновенной скоростью.
Под
средней скоростью <
![]() > понимается векторная величина,
определяемая отношением перемещения
материальной точки к промежутку времени,
за который это перемещение произошло:
> понимается векторная величина,
определяемая отношением перемещения
материальной точки к промежутку времени,
за который это перемещение произошло:
<
> =
![]()
Направление
вектора средней скорости определяется
направлением вектора перемещения
![]() .
.
Под мгновенной скоростью (или просто скоростью) материальной точки понимается первая производная ее радиуса-вектора по времени t:
=
![]()
В декартовой системе координат вектор может быть представлен следующим образом:
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() - проекции вектора скорости на оси
координат X, Y,
Z, а
,
,
- проекции вектора скорости на оси
координат X, Y,
Z, а
,
,
![]() - единичные орты координат.
- единичные орты координат.
Вектор мгновенной скорости направлен по касательной в соответствующей точке траектории по направлению движения.
В СИ единица измерения скорости – метр в секунду (м/с).
М одуль мгновенной скорости находится как первая производная пути S по времени t:
![]()
Модуль
мгновенной скорости можно также
рассчитать, зная проекции вектора
скорости
![]() на оси декартовых координат x,
y,
z
:
на оси декартовых координат x,
y,
z
:
![]()
Пройденный
путь S
за промежуток времени от t1
до t2
определяется как интеграл от модуля
скорости
![]() по времени t:
по времени t:
Зная пройденный путь S за промежуток времени
∆t = t2 - t1 ,
можно найти среднюю путевую скорость:
Быстрота изменения скорости характеризуется ускорением.
Различают
среднее <
![]() > и мгновенное
ускорение.
> и мгновенное
ускорение.
Среднее
ускорение определяется как отношение
изменения скорости
![]() к промежутку времени Δt,
за который это изменение произошло:
к промежутку времени Δt,
за который это изменение произошло:
<
>
=
![]()
Мгновенное ускорение (или просто ускорение) – это первая производная скорости по времени t:
=
![]()
В СИ единица измерения ускорения – метр на секунду в квадрате (м/с2).
При ускоренном прямолинейном движении вектор ускорения совпадает по направлению с вектором скорости и направлен в противоположную сторону – при замедленном движении.
Модуль скорости при равноускоренном движении рассчитывается по формуле:
=![]() +at,
+at,
где – начальная скорость материальной точки,
а![]() пройденный путь
пройденный путь
Материальная
точка может совершать плоское криволинейное
движение, при котором все точки ее
траектории находятся в одной плоскости.
В этом случае направление вектора
полного ускорения
![]() определяется направлением его
составляющих: нормального
n
определяется направлением его
составляющих: нормального
n![]() и тангенциального
τ:
и тангенциального
τ:
= n + τ
Вектор
n
характеризует
изменение скорости
по направлению. Он направлен по радиусу
кривизны траектории R
к центру кривизны (рис. 3), а его величина
рассчитывается по формуле:
![]() =
=
![]()
Вектор
τ
характеризует изменение скорости
![]() по величине. Он направлен перпендикулярно
вектору
n
и
совпадает с направлением вектора
скорости
при ускоренном движении, либо в
противоположном направлении - при
замедленном движении.
по величине. Он направлен перпендикулярно
вектору
n
и
совпадает с направлением вектора
скорости
при ускоренном движении, либо в
противоположном направлении - при
замедленном движении.
Модуль тангенциального ускорения определяется по формуле:
![]() =
=![]()
Модуль полного ускорения:
а
=
![]()
Д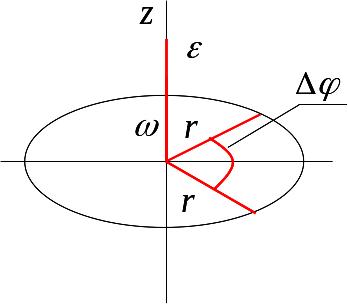 вижение
материальной точки по криволинейной
плоской траектории, например, по
окружности, характеризуется угловой
скоростью
вижение
материальной точки по криволинейной
плоской траектории, например, по
окружности, характеризуется угловой
скоростью
![]() и угловым ускорением
и угловым ускорением
![]() (Рис.4). Угловая скорость определяет
быстроту изменения угла поворота
(Рис.4). Угловая скорость определяет
быстроту изменения угла поворота
![]() радиуса- вектора
материальной точки от времени t,
т.е. угловая скорость является первой
производной угла поворота
радиус-вектора
радиуса- вектора
материальной точки от времени t,
т.е. угловая скорость является первой
производной угла поворота
радиус-вектора
![]() материальной точки по времени t
:
материальной точки по времени t
:
Рис.4
![]()
В СИ единица измерения угловой скорости – радиан в секунду (рад/с).
Вектор
![]() направлен вдоль оси вращения таким
образом, чтобы глядя из его конца на
плоскость, в которой осуществляется
поворот радиус-вектора
материальной точки, мы видели бы этот
поворот происходящим против часовой
стрелки (рис. 4).
направлен вдоль оси вращения таким
образом, чтобы глядя из его конца на
плоскость, в которой осуществляется
поворот радиус-вектора
материальной точки, мы видели бы этот
поворот происходящим против часовой
стрелки (рис. 4).
Угловое ускорение ε характеризует быстроту изменения угловой скорости, т.е. угловое ускорение ε определяется как первая производная угловой скорости ω по времени t:
ε
=
![]()
В СИ единица измерения углового ускорения - радиан на секунду в квадрате (рад/с2).
Направление
вектора
![]() совпадает с направлением вектора
при ускоренном вращении, либо противоположно
по направлению – при замедленном
вращении.
совпадает с направлением вектора
при ускоренном вращении, либо противоположно
по направлению – при замедленном
вращении.