

§1.2 Метод планов скоростей.
Пример 1. Построим план скоростей (рис.5, б) для механизма подачи суппорта строгального станка.
Исходные данные: lOA = 0,074 м; lOB = 0,286 м; lBC = 0,420 м;
h = 0,460 м; φ1 = 1500; ω1 = 27 рад/с.
В виде исключения опишем построение плана положения механизма.
Для построения плана положения механизма (рис. 5, а) примем длину кривошипа OA = 18,5 мм. По формуле (1) вычислим масштабный коэффициент длины
μl = lOA / OA = 0,074 / 18,5 = 0,004 [м/мм].
Вычислим длины остальных отрезков для построения плана положения механизма, используя формулу (1):
OB = lOB / μl = 0,286 / 0,004 = 71,5 мм; BC = lBC / μl = 0,240 / 0,004 = 60 мм;
BE = h / μl = 0,460 / 0,004 = 115 мм.
Построения проводим в следующей последовательности (рис. 5, а):
◊ выберем положение точки О так, чтобы план положения механизма располагался в левом верхнем углу листа;
◊ через точку О проведем вертикальную прямую и введем систему координат
хОу;
◊ вниз вдоль оси "y" отложим отрезок OB = 71,5 мм;
◊ вверх вдоль оси "y" отложим отрезок BE = 115 мм.
◊ через точку Е проведем горизонтальную прямую – ось (x – x1) движения
горизонтальной рейки звена 5;
◊ От оси Ох отложим угол φ1 = 1500 и проведем из точки О луч;
◊ отложим на этом луче отрезок ОА = 18,5 мм; получим заданное положение
кривошипа ОА;
◊ через В и А проведем луч и отложим на нем отрезок BC = 60 мм; получим заданное положение кулисы ВС;
◊ проведем через точку C вертикальную прямую до пересечения с осью (x – x1); в результате получим заданное положение точки D, а, следовательно, и заданное положение ползуна 5.
Построение плана скоростей
1. Определим скорость точки A1 “пальца” кривошипа:
![]() =
ω1
lOA=
27· 0,074 ≈ 2 м/с.
(3)
=
ω1
lOA=
27· 0,074 ≈ 2 м/с.
(3)
Вектор
![]() перпендикулярен OA
и направлен в сторону вращения кривошипа,
то есть по ω1
.
перпендикулярен OA
и направлен в сторону вращения кривошипа,
то есть по ω1
.
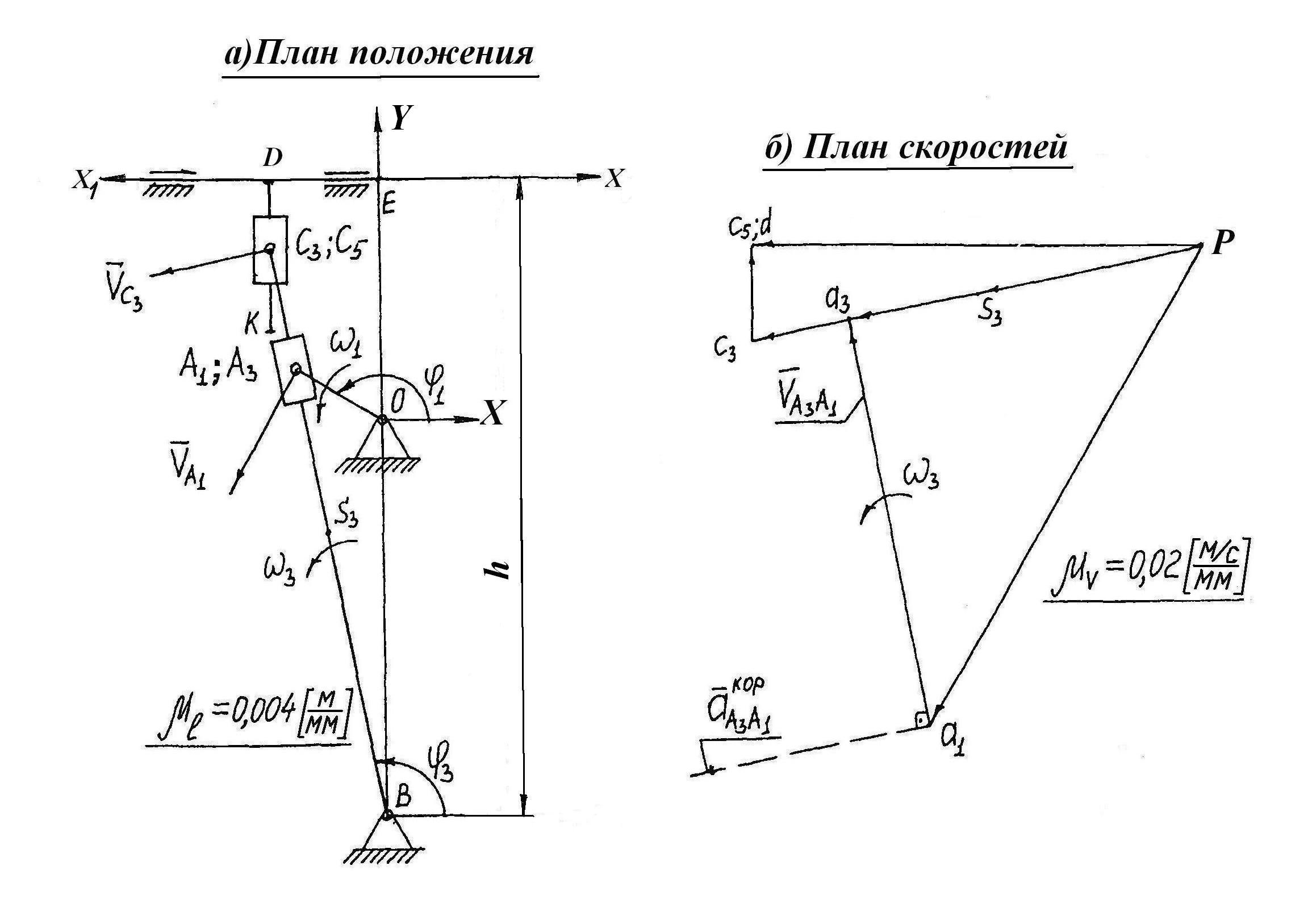
Рис. 5
2. Определим скорость точки A3 кулисы BC. Для этого составим векторное равенство:
![]() ,
, ![]() (4)
(4)
где
![]() –
скорость точки A3,
принадлежащей кулисе BC
и совпадающей в данный момент с точкой
A1.
Так как кулиса вращается вокруг оси,
проходящей через точку B,
то вектор
направлен
по касательной к окружности радиуса
BA
и, следовательно, перпендикулярен BA
(а значит и ВС);
–
скорость точки A3,
принадлежащей кулисе BC
и совпадающей в данный момент с точкой
A1.
Так как кулиса вращается вокруг оси,
проходящей через точку B,
то вектор
направлен
по касательной к окружности радиуса
BA
и, следовательно, перпендикулярен BA
(а значит и ВС);
![]() – вектор
скорости относительного движения вдоль
оси кулисы BC;
следовательно, вектор
параллелен BC.
– вектор
скорости относительного движения вдоль
оси кулисы BC;
следовательно, вектор
параллелен BC.
Таким образом, в равенстве (4)
![]()
![]() BC;
BC;
![]() OA;
OA;
![]() ׀׀BC
.
(5)
׀׀BC
.
(5)
3.
План скоростей должен быть построен в
масштабе. Введем обозначения: P
–
полюс плана скоростей;
![]() –
вектор, изображающий на плане скоростей
скорость точки А1
(
–
вектор, изображающий на плане скоростей
скорость точки А1
(![]() )
в масштабе μV.
Масштабный
коэффициент плана скоростей
определяется по формуле:
)
в масштабе μV.
Масштабный
коэффициент плана скоростей
определяется по формуле:
![]() [(м
/с)/
мм],
(6)
где
–
скорость точки A1,[м
/с];
[(м
/с)/
мм],
(6)
где
–
скорость точки A1,[м
/с];
Pa1 – длина вектора , [мм];
Для вычисления масштабного коэффициента μV необходимо задаться длиной отрезка Pa1. При этом должны выполняться два условия:
1) длина отрезка 60 мм ≤ Pa1 ≤ 100 мм; для некоторых положений механизма, соответствующих фазе холостого хода, например, для положения 9 (рис. 4), рекомендуется принимать длину отрезка Pa1 < 60 мм;
2) длина отрезка Pa1 должна быть кратна величине скорости . Кратность означает, что в результате деления на Pa1 должно получится рациональное число.
В соответствии с этими условиями примем длину отрезка Pa1 = 100 мм; тогда по формуле (6) вычислим
![]() =
2/100 = 0,02
[(м/с)/мм].
=
2/100 = 0,02
[(м/с)/мм].
4. Используя равенство (4), построим треугольник скоростей (рис. 5, б) (этот треугольник является базовым для всех кулисных схем):
◊ выберем положение точки P ─ полюса плана скоростей, придерживаясь следующих условий:
1) точка Р должна располагаться возможно близко к плану положения механизма; 2) при построении план скоростей не должен накладываться на план положения механизма;
◊ проведем из точки Р луч, перпендикулярный OA, в направлении вращения
кривошипа, то есть по ω1 (рис. 5, а и 5, б);
◊ отложим на этом луче отрезок Pa1 = 100 мм;
◊ на основании равенства (4) с учетом выводов (5) через точку a1 проведем
прямую, параллельную BC, а через полюс P – прямую, перпендикулярную
BC;
на их взаимном пересечении получим
точку a3;
![]() ─ скорость точки А3
─ скорость точки А3
в
масштабе
![]() .
.
5. Определим скорость точки C3 кулисы BC. Составим пропорцию для плана скоростей:
Pc3 / Pa3 = BC /BA; (7)
откуда получим Pc3 = Pa3·BC /BA, мм. (8)
По формуле (8) вычислим
Pc3 = 66·105/82 = 84,5 мм.
где длины отрезков Pa3 = 66 мм, ВС = 105 мм и ВА = 82 мм получены измерениями на плане скоростей и на плане механизма.
Так как на плане механизма точки С3 и А3 расположены по одну сторону от оси вращения В, то и на плане скоростей точки “с3” и ”a3 ” должны быть расположены также по одну сторону от полюса P. Следовательно, точка “с3” лежит на продолжении Pa3 . В соответствии с этим на продолжении луча Pa3 отложим отрезок Pc3 = 84,5 мм.
6. Определим скорость точки C5. Эта точка расположена на вертикальном стержне DK звена 5 и совпадает в данный момент с точкой C3 кулисы BC. Скорость точки C5 определим из векторного равенства:
![]() ,
(9)
,
(9)
где
![]() – абсолютная скорость точки C5;
так как звено 5 совершает возвратно -
поступательное движение вдоль оси (x
–х1),
то вектор
параллелен
этой оси; кроме того, заметим, что
– абсолютная скорость точки C5;
так как звено 5 совершает возвратно -
поступательное движение вдоль оси (x
–х1),
то вектор
параллелен
этой оси; кроме того, заметим, что
![]() ;
;
![]() –
скорость относительного поступательного
движения вдоль DK;
следовательно, вектор
–
скорость относительного поступательного
движения вдоль DK;
следовательно, вектор
![]() параллелен
DK.
параллелен
DK.
7. Продолжим построение плана скоростей. На основании равенства (9) через точку “ с3” плана скоростей проведем вертикальную прямую, а через полюс P – горизонтальную прямую; на их взаимном пересечении получим точку “c5”. Проставим направления всех векторов (рис. 5, б).
8. Используя масштабный коэффициент μV, вычислим:
◊ скорость точки D
![]() ·μV
= 82,5·0,02 =1,65
м/с,
·μV
= 82,5·0,02 =1,65
м/с,
◊ угловая скорость кулисы BC
ω3
=
![]() =Pc3·
μV/lBC
= 84,5·0,02/0,42
= 4
рад/с,
=Pc3·
μV/lBC
= 84,5·0,02/0,42
= 4
рад/с,
◊ скорость относительного движения
![]() =
[a1a3]
· μV
= 75· 0,02 =
1,5 м/с,
=
[a1a3]
· μV
= 75· 0,02 =
1,5 м/с,
◊ скорость центра масс кулисы:
![]() =
Ps3·
μV
= 0,5·84,5·0,02
= 0,845 м/с,
=
Ps3·
μV
= 0,5·84,5·0,02
= 0,845 м/с,
где длины отрезков Pc5 = 82,5 мм и [a1a3] = 75 мм получены измерениями на плане скоростей механизма (рис. 5, б); длина отрезка Pc3 = 84,5 мм вычислена по формуле (8); длина отрезка Ps3 = 0,5· Pc3 ─ по условию задачи; lBC = 420 мм = 0,42 м – заданная длина кулисы BC.
Пример 2. Построим план скоростей (рис. 6,б) для второй модели механизма подачи суппорта строгального станка.
Исходные данные: lOA = 0,05 м; lOB = 0,100 м; lBC = 0,200 м;
lCD = 0,120 м; h = 0,230 м; φ1 = 240о; ω1 = 36 рад/с.
Построение плана положения механизма (рис. 6, а). Примем для построения длину кривошипа ОА = 25 мм и вычислим по формуле (1) масштабный коэффициент длины μl = lOA / OA = 0,005 / 25 = 0,002 [м/мм].
Вычислим длины остальных отрезков для построения плана положения механизма, используя формулу (1):
OB = lOB / μl = 0,100 / 0,002 = 50 мм; BC = lBC / μl = 0,200 / 0,002 = 100 мм;
BE = h / μl = 0,230 / 0,002 = 115 мм; CD = lCD / μl = 0,120 / 0.002 = 60 мм.
Построение кулисной части (звенья 1, 2 и 3) плана положения проводится по методике, описанной в примере 1. Для построения заданного положения шатуна CD и точки D ползуна 5 нужно из точки С раствором циркуля R = CD = = 60 мм сделаем засечку на оси (х ─ х1). Соединим точку D с точкой С и начертим ползун 5.
Построение плана скоростей
1. Определим скорость точки A1 “пальца” кривошипа:
= 36·0,05 = 1,8 м/с.
Вектор перпендикулярен OA и направлен в сторону вращения кривошипа, то есть по ω1 .
2. Определим скорость точки A3 кулисы BC. Для этого составим векторное равенство (4):
,
где – скорость точки A3, принадлежащей кулисе BC и совпадающей в данный момент с точкой A1. Так как кулиса вращается вокруг оси, проходящей через точку B, то вектор направлен по касательной к окружности радиуса BA и, следовательно, перпендикулярен BA (а значит и ВС);
– вектор скорости относительного движения вдоль оси кулисы BC; следовательно, вектор параллелен BC.
Таким образом, в равенстве (4)
BC; OA; ׀׀BC. (5*)
3. Определим масштабный коэффициент плана скоростей.
В соответствии с рекомендациями (см. пример 1) примем длину отрезка Pa1 = 60 мм и по формуле (6) вычислим масштабный коэффициент плана скоростей
μV
=![]() = 1,8 / 60 = 0,03 [(м/с)/мм].
= 1,8 / 60 = 0,03 [(м/с)/мм].
4. Используя равенство (4), построим треугольник скоростей (рис. 6, б):
◊ выберем положение точки P ─ полюса плана скоростей;
◊ проведем из точки Р луч, перпендикулярный OA, в направлении вращения
кривошипа, то есть по ω1 (рис. 6, а и 6, б);
◊ отложим на этом луче отрезок Pa1 = 100 мм;
◊ на основании равенства (4) с учетом выводов (5*) через точку a1 проведем
прямую, параллельную BC, а через полюс P – прямую, перпендикулярную
BC;
на их взаимном пересечении получим
точку a3;
![]() ─ скорость точки А3
─ скорость точки А3
в масштабе ;
5. Определим скорость точки C кулисы BC. Составим пропорцию для плана
скоростей:
Pc / Pa3 = BC /BA;
откуда получим Pc = Pa3·BC /BA, мм; (8*)
По формуле (8*) вычислим
Pc = Pa3·BC /BA = 36 · 100 / 31 = 116 мм,
где длина отрезка Pa3 = 36 мм получена измерением на плане скоростей; длина отрезка ВА = 31 мм получена измерением на плане положения механизма; длина отрезка ВА = 31 мм получена вычислением при построении плана положения механизма.
Так как на плане механизма точки С и А3 расположены по одну сторону от оси вращения В, то и на плане скоростей точки “с” и ”a3 ” должны быть расположены также по одну сторону от полюса P. Следовательно, точка “с” лежит на продолжении Pa3 . В соответствии с этим на продолжении луча Pa3 отложим отрезок Pc = 116 мм (рис. 6, б).
6. Определим скорость точки D. Шатун CD совершает плоскопараллельное движение. Считая точку D принадлежащей звену 4, на основании
теоремы о скоростях точек тела, совершающего плоскопараллельное движение, составим векторное равенство:
![]() ,
(10)
,
(10)
где
![]() −
скорость точки D
относительно C
во вращательном движении звена CD
вокруг C;
следовательно, вектор
перпендикулярен
CD;
−
скорость точки D
относительно C
во вращательном движении звена CD
вокруг C;
следовательно, вектор
перпендикулярен
CD;
![]() абсолютная скорость точки D.
абсолютная скорость точки D.
Так
как точка D
принадлежит одновременно и звену 5,
совершающему возвратно – поступательное
движение вдоль оси (x
– x1),
то, следовательно, вектор
![]() параллелен оси (x
– x1).
параллелен оси (x
– x1).
7.
На основании равенства (10) закончим
построение плана скоростей (рис. 6, б):
через точку “c”
проведем прямую, перпендикулярную
звену DC,
а через полюс P
– горизонтальную
прямую; на их взаимном пересечении
получим точку “d”.
Проставим направления всех векторов.
Дополнительно определим скорость
точки S4
– центра масс шатуна CD.
Для этого на плане скоростей разделим
отрезок cd
пополам;
полученную точку “s4”
соединим с полюсом P.
![]() скорость
точки S4
в масштабе μV.
скорость
точки S4
в масштабе μV.
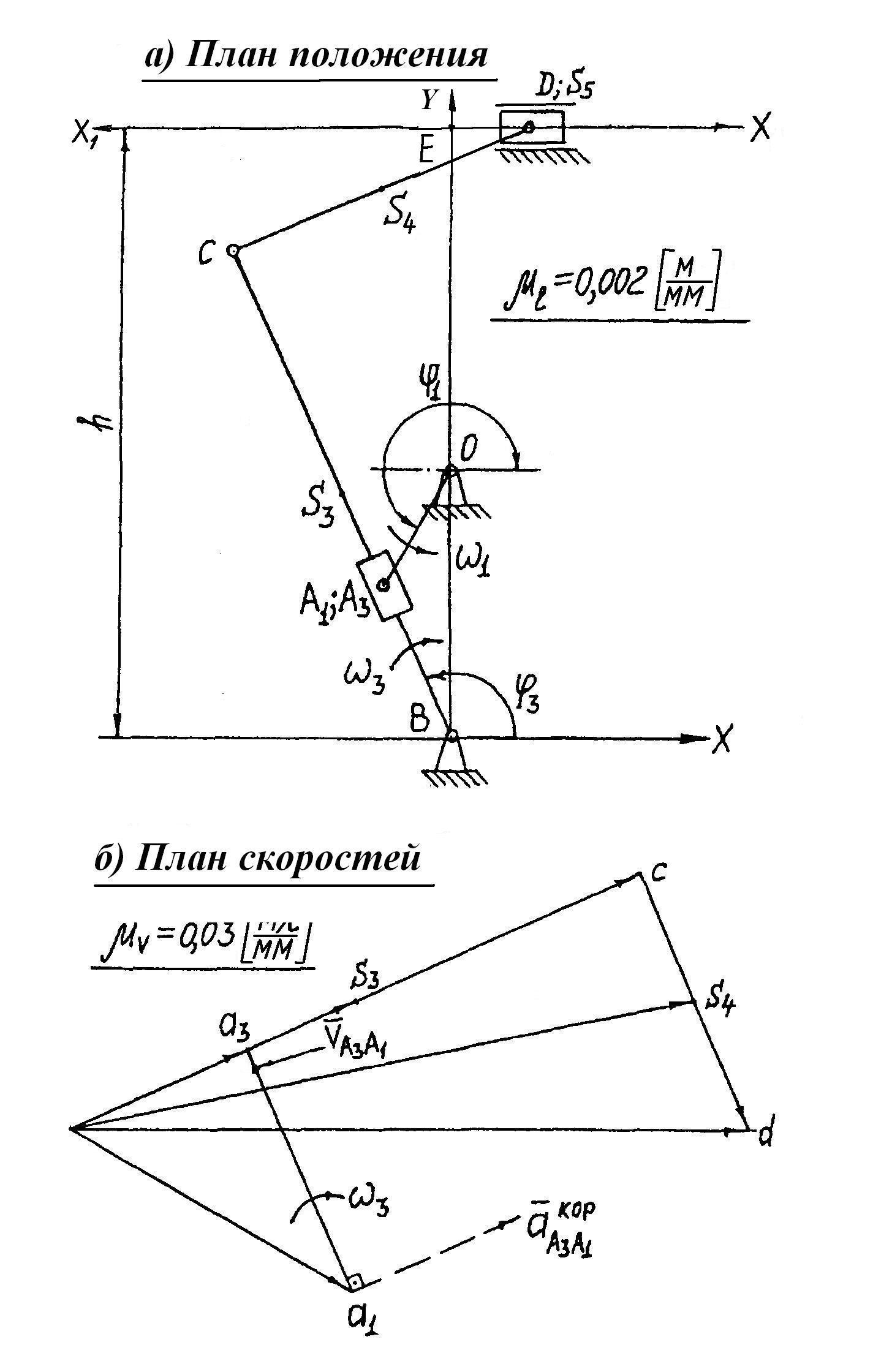
Рис. 6
8. Используя масштабный коэффициент μV, вычислим:
◊ скорость точки D:
VD = Pd·μV = 126· 0,03 = 3,78 м/c;
◊ скорость точки S3 кулисы ВС
![]() =
58 ·
0,03 = 1,74 м/с;
=
58 ·
0,03 = 1,74 м/с;
◊ скорость точки S4
![]() =
Ps4·
μV
= 119·
0,03 = 3,57
м/c;
=
Ps4·
μV
= 119·
0,03 = 3,57
м/c;
◊ угловая скорость кулисы BC
ω3 = VC / lBC = Pc·μV / lBC =116· 0,03 / 0,2 = 17,4 рад/с;
◊ угловая скорость шатуна СD
ω4 = VDC / lCD= cd·μV / lCD = 53· 0,03 / 0,12 = 13,25 рад/с; ◊ скорость относительного движения
= [a1a3] · μV = 49· 0,03 = 1,47 м/с;
где длины отрезков Pd = 126 мм, Ps4 = 119 мм, cd = 53 мм, [a1a3] = 49 мм получены измерениями на плане скоростей (рис. 6, б); длина отрезка Pc = 116 мм вычислена по формуле (8);
Пример 3. Построим план скоростей (рис. 7,б) для третьей модели механизма подачи суппорта строгального станка.
Исходные данные: lOA = 0,096 м; lOB = 0,22 м; h = 0,38 м; lBD = 0,46 м; φ1 = 30o; угловая скорость кривошипа ω1 = 15 рад/с.
Построение плана положения механизма. Примем длину кривошипа ОА = 24 мм и вычислим по формуле (1) масштабный коэффициент длины μl = = lOA / OA = 0,096 /24 = 0,004 [м/мм].
Вычислим длины остальных отрезков для построения плана положения, используя формулу (1):
OB = lOB / μl = 0,220 / 0,004 = 55 мм; BD = lBD / μl = 0,460 / 0,004 = 115 мм;
BE = h / μl = 0,380 / 0,004 = 95 мм.
Построим план положения механизма (рис. 7, а), придерживаясь, в основном, методики, примененной в примере 1.
Построение плана скоростей. Методика построения плана скоростей почти полностью повторяет методику для схемы механизма, изображенного на рис. 5, а (см. пример 1). Некоторое различие при графическом решении равенства (9) объясняется различием видов структурных групп (4 – 5) в схемах рассматриваемых механизмов. Поэтому проведем лишь необходимые вычисления и дадим краткие пояснения к построению плана скоростей.
1. Определим скорость точки A1
= ω1· lOA = 15· 0,096 = 1,44 м/с.
Вектор перпендикулярен OA и направлен в сторону вращения кривошипа, то есть по ω1 .
2. Определим скорость точки A3 кулисы BD, используя векторное равенство (4):
,
где BC; OA; ׀׀BC. (5*)
3. Определим масштабный коэффициент плана скоростей.
В соответствии с рекомендациями (см. пример 1) примем длину отрезка Pa1 = 72 мм и по формуле (6) вычислим масштабный коэффициент плана скоростей
μV = = 1,44 / 72 = 0,02 [(м/с)/мм].
4. Используя равенство (4), построим треугольник скоростей (рис. 7, б):
◊ выберем положение точки P ─ полюса плана скоростей;
◊ проведем из точки Р луч, перпендикулярный OA, в направлении вращения
кривошипа, то есть по ω1 (рис. 7, а и 7, б);
◊ отложим на этом луче отрезок Pa1 = 72 мм;
◊ на основании равенства (4) с учетом выводов (5*) через точку a1 проведем
прямую, параллельную BD, а через полюс P – прямую, перпендикулярную
BD; на их взаимном пересечении получим точку a3; ─ скорость точки А3
в масштабе ;
5. Определим скорости точек C3 и D. Составим пропорции для плана скоростей:
Pc3 / Pa3 = BC /BA; PD / Pa3 = BD / BA;
Откуда получим
Pc3 = Pa3·BC / BA = 53· 99 / 70 = 75 мм;
Pd = Pa3·BD / BA = 53·115 / 70 = 87 мм
где длина отрезка Pa3 = 53 мм получена измерением на плане скоростей, длина отрезка ВС = 99 мм получена измерением на плане положения механизма; длина отрезка BD = 115 мм получена вычислением при построении плана положения механизма.
6. Скорость точки S3 определим исходя из условия, что точка S3 делит звено BD пополам, то есть BS3 = 0,5·BD.
Следовательно, Ps3 = 0,5·PD = 43,5 мм.
Так как на плане механизма точки А3, С3 и D расположены по одну сторону от оси вращения В, то и на плане скоростей точки "a3", "c3" и "d" должны быть расположены также по одну сторону от полюса P. Следовательно, точки "с3" и "d" лежат на продолжении Pa3 . В соответствии с этим на продолжении луча Pa3 отложим отрезки Pc3 = 75 мм и Pd = 87 мм (рис. 7, б).
7. Определим скорость точки C5, используя векторное равенство (9):
,
где – абсолютная скорость точки C5; так как звено 5 совершает возвратно ─ поступательное движение вдоль оси (x –х1), то вектор параллелен этой оси; – скорость относительного поступательного движения вдоль оси кулисы BD; следовательно, вектор параллелен BD.
8. В соответствии с равенством (9), закончим построение:
◊ через точку "с3" проведем прямую, параллельную BD, а через полюс P ─ горизонтальную прямую. На их взаимном пересечении получим точку "с5".
Pc5 ─ скорость точки C5 в масштабе μV.
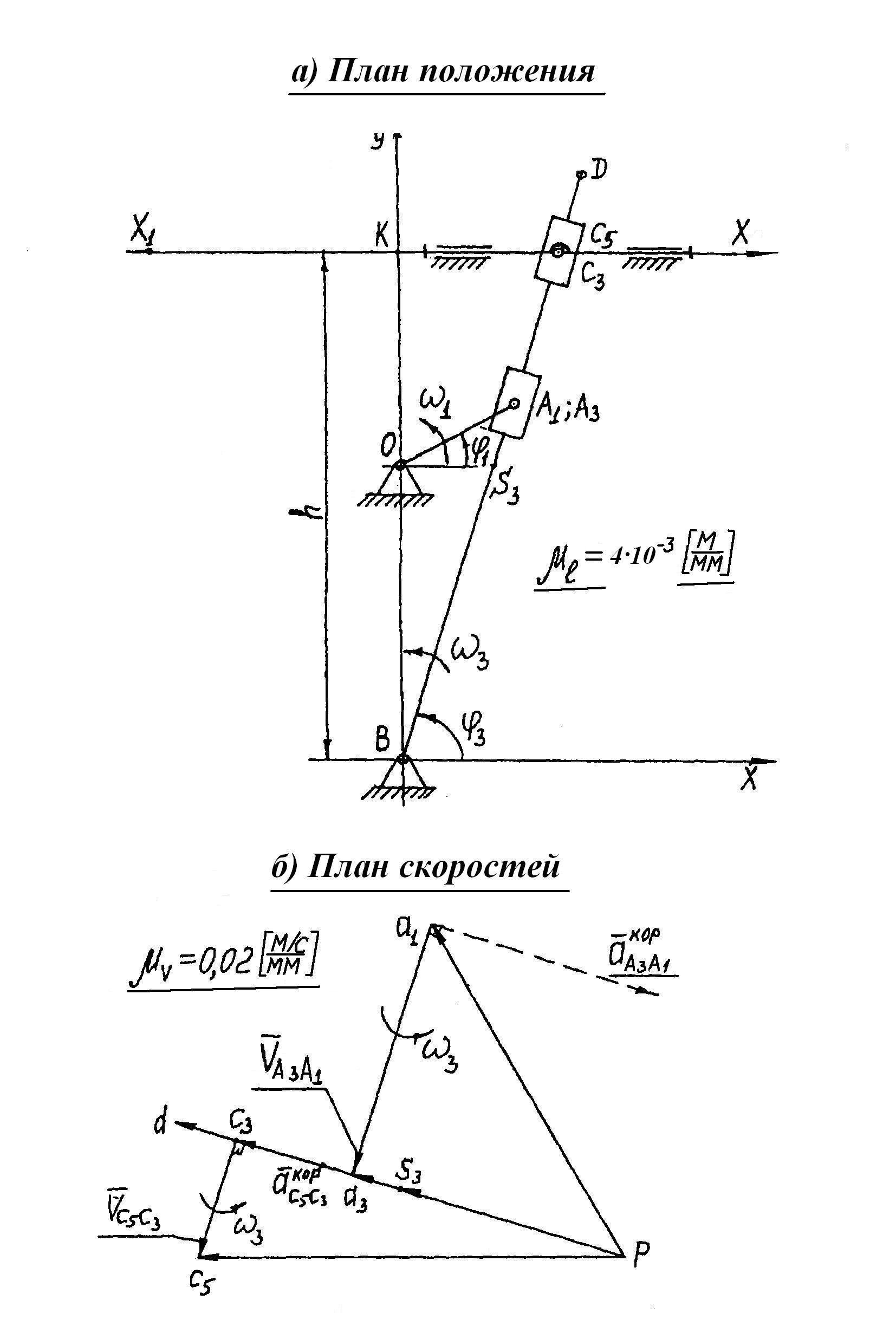
Рис. 7
9. Используя масштабный коэффициент μV, вычислим:
◊ скорость точки C5:
![]() =
Pc5·μV
=
79·
0,02 = 1,58
м/с;
=
Pc5·μV
=
79·
0,02 = 1,58
м/с;
◊ скорость относительного движения:
= [a1a3]·μV = 49· 0,02 = 0,98 м/с;
◊ скорость
относительного движения
![]() :
:
= [c3c5]·μV = 24· 0,02 = 0,48 м/с;
◊ скорость точки S3:
![]() μV
= 43,5·
0,02 = 0,87
м/с;
μV
= 43,5·
0,02 = 0,87
м/с;
◊ угловая скорость кулисы BD:
ω3=![]() /
lAB=Pa3·
μV
/ (BA·
μV)=
53·
0,02 /
(70·
0,004)
= 3,8
рад/с,
/
lAB=Pa3·
μV
/ (BA·
μV)=
53·
0,02 /
(70·
0,004)
= 3,8
рад/с,
где
длины отрезков
Pc5
= 79 мм,
[a1a3]
= 49 мм, [c3c5]
= 24 мм и Pa3
= 53 мм получены измерениями на плане
скоростей механизма (рис. 7, б),
длина отрезка![]() =
43,5 мм получена вычислением (см. пункт 6
решения).
=
43,5 мм получена вычислением (см. пункт 6
решения).
Пример 4. Построим план скоростей (рис. 8, б) механизма подачи суппорта долбежного станка.
Исходные данные: lOA= 0,08 м; lOB = 0,16 м; lBC = 0,100 м; lBE = 0,280 м; lCD = 0,200 м; ω1 = 11,5 рад/с; φ1 = 30о.
Построение
плана положения механизма.Для
построения плана положения механизма
примем длину кривошипа ОА
= 32 мм и вычислим по формуле (1) масштабный
коэффициент длины μl
= = lOA
/ OA
= 0,080 /32 = 0,0025 [м/мм]
=
![]() [м/мм].
[м/мм].
Вычислим длины остальных отрезков для построения плана положения, используя формулу (1):
OB = lOB / μl = 0,160 / 0,0025 = 64 мм; BC = lBC / μl = 0,100 / 0,0025 = 40 мм;
BE = lBE / μl = 0,280 / 0,0025 = 112 мм; CD = lCD / μl = 0,200 / 0,0025 = 80 мм.
Построим план положения механизма (рис. 8, а), придерживаясь методики, примененной в примерах 1 и 2.
Построение плана скоростей. Методика построения аналогична той, которая применялась при построении плана скоростей механизма, изображенного на рис. 6, а (см. пример 2). Поэтому проведем лишь необходимые вычисления и дадим краткие пояснения к построению (подробные пояснения даны в примерах 1 и 2).
1. Определим скорость точки А1
![]() =
ω1·lOA
= 11,5·
0,08 = 0,92
м/с;
=
ω1·lOA
= 11,5·
0,08 = 0,92
м/с;
вектор
![]() перпендикулярен
ОА
и направлен в сторону вращения кривошипа,
то есть по ω1
(см. рис. 8, а
и 8, б).
перпендикулярен
ОА
и направлен в сторону вращения кривошипа,
то есть по ω1
(см. рис. 8, а
и 8, б).
2.
Определим скорость точки
![]() кулисы CE,
используя векторное равенство (4):
кулисы CE,
используя векторное равенство (4):
![]() ,
,
где
вектор
![]() параллелен
ВE,
а вектор
параллелен
ВE,
а вектор
![]() перпендикулярен
ВE.
(5*)
перпендикулярен
ВE.
(5*)
3. Определим масштабный коэффициент плана скоростей.
Примем Pa1 = 92 мм и по формуле (6) вычислим
μV = / Pa1 = 0,92 / 92 = 0,01 [(м/с)/мм].
4. Используя равенство (4), построим треугольник скоростей (рис. 8, б):
◊ выберем положение точки P ─ полюса плана скоростей;
◊ проведем из точки Р луч, перпендикулярный OA, в направлении вращения
кривошипа, то есть по ω1 (рис. 8, а и 8, б);
◊ отложим на этом луче отрезок Pa1 = 92 мм;
◊ на основании равенства (4) с учетом выводов (5*) через точку a1 проведем
прямую, параллельную BE, а через полюс P – прямую, перпендикулярную
BE; на их взаимном пересечении получим точку a3; ─ скорость точки А3
в масштабе ;
5.Скорости точек E, C и S3 определим, составив пропорции для плана скоростей Pe/Pa3 = BE/BA; Pc/Pa3 = BC/BA и Ps3/Pa3 = BS3/BA;
откуда следует:
Pe=Pa3·BE / BA=70·112 / 85= 92 мм;
Pс = Pa3·BC / BA = 70·40 / 85 = 33 мм;
Ps3 = Pa3·BS3 / BA = 70·36 / 85 = 29,5 мм;
где длины отрезков BE = 112 мм, ВС = 40 мм и BS3 = (BE – BC)/2 = (112- 40)/2 = 36 мм вычислены (см. построение плана положения механизма);
длина отрезка Pa3 = 70 мм получена измерением на плане скоростей.
На плане механизма точки S3, А3 и E расположены по одну сторону от оси вращения В, а точка C по другую сторону. Следовательно, и на плане скоростей точки "s3", "a3" и "e" должны быть расположены в той же последовательности по одну сторону от полюса P, а точка "с" по другую сторону от полюса P. В соответствии с этим на продолжении луча Pa3 отложим отрезки Ps3 = =29,5 мм и Pe = 92 мм (рис. 7, б).
На плане скоростей точка “e” лежит на продолжении Pa3, точка “s3” внутри отрезка Pa3 , а точка “c” на той же прямой с противоположной стороны от полюса P (см. рис. 8, б).
6. Определим скорость точки D, используя равенство (10) (см. пример 2):
![]() ,
,
где
![]() ,
а
параллелен оси Bx.
,
а
параллелен оси Bx.
На основании равенства (10) через точку “c” плана скоростей проведем прямую, перпендикулярную CD, а через полюс P – вертикальную прямую; на их взаимном пересечении получим точку “d ”. Проставим направления всех векторов.
Pd = 26 мм; cd = 11,5 мм; Ps4 = 29,5 мм; [a1a3] = 60 мм.
7. Используя масштабный коэффициент μV, вычислим:
◊ скорости центров масс звеньев:
VD = Pd·μV = 26· 0,01 = 0,26 м/с;
VS4 = Ps4·μV =29,5· 0,01 = 0,295 м/с;
VS3 = Ps3·μV = 29,5· 0,015 = 0,295 м/с;
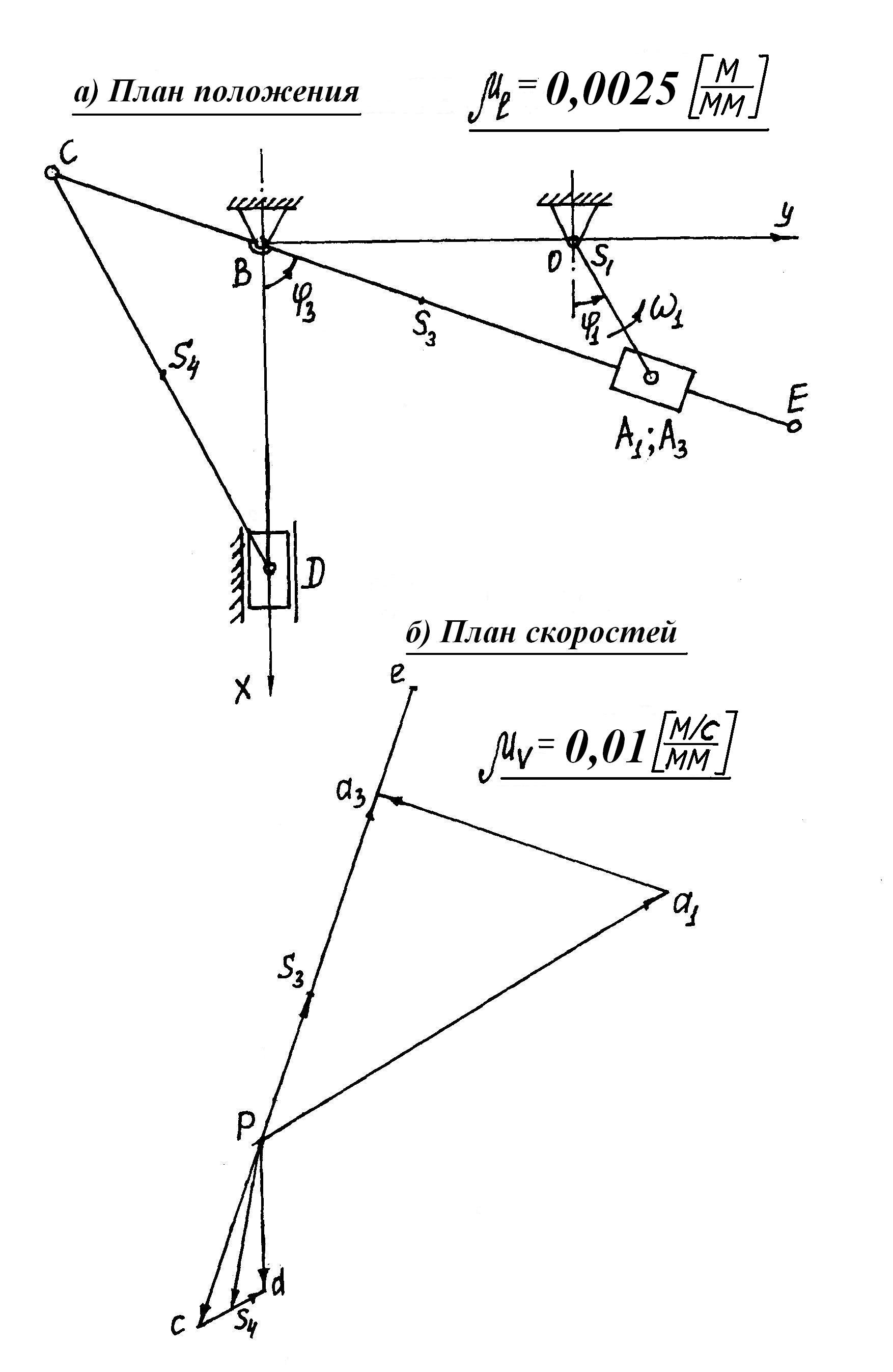
Рис. 8
◊ угловые скорости кулисы CE и шатуна CD:
ω3 = VC / lBC = Pc·μV / lBC = 33· 0,01 / 0,1 = 3,3 рад/с;
ω4 = VDC / lCD = cd· μV / lCD = 11,5· 0,01 / 0,2 = 0,575 рад/с;
◊ скорость относительного движения
![]() =
[a1a3]
·
μV
= 60 ·
0,01 = 0,60 м/с;
=
[a1a3]
·
μV
= 60 ·
0,01 = 0,60 м/с;
где длины отрезков Pd = 26 мм; cd = 11,5 мм; Ps4 = 29,5 мм; [a1a3]= 60 мм получены измерениями на плане скоростей.
Построение диаграммы скоростей. Для проведения полного кинематического анализа необходимо построить планы скоростей для всех последовательных положений механизма. По полученным результатам строится диаграмма зависимости скорости ведомого (исполнительного) звена механизма от времени. Например, для механизма, изображенного на рис. 5, а – это диаграмма VD(t).Для облегчения процесса построения планов скоростей и обработки полученных результатов составляется вспомогательная таблица 3. Составим такую таблицу для механизма, изображенного на рис. 5, а.
Исходные данные: lOA=0,074 м; lOB=0,286 м; lBC=0,420 м; h=0,46 мм;
ω1=27 рад/с.
Масштабный коэффициент планов скоростей μV = 0,02 [(м/с)/мм]. Скорости точек D и S3 вычислены по формулам: VD=VC5=Pc5·μV;
VS3= 0,5·VC3 = 0,5·Pc3·μV ;
угловая скорость кулисы BC вычислена по формуле
ω3 = VC3 / lBC,
где Pc5 и Pc3 – длины отрезков из таблицы 3 , мм;
lBC – заданная длина кулисы в метрах.
Таблица 3
-
№ пол.
1 и 7
2 и 6
3 и 5
4
8 и 12
9 и 11
10
Pa3, мм
25
66
91
100
27
77
100
AB, мм
148,5
165
176
180
129
112,5
106
Pc3, мм
35
84
109
117
44
144
198
Pc5, мм
34
82
108
116
42
142
198
VD, м/с
0,68
1,64
2,16
2,32
0,84
2,84
3,96
Vs3, м/с
0,35
0,84
1,09
1,17
0,44
1,44
1,98
ω3, рад/с
1,68
3,99
5,19
5,55
2,08
6,85
9,42
Длина отрезка Pc5 для каждого положения механизма получена измерением на соответствующем плане скоростей.
Для механизмов, в состав которых входит шатун, например, для механизма, изображенного на рис. 3, вспомогательная таблица имеет вид таблицы 3*.
Параметры, занесенные в таблицу 3*, получены при построении планов скоростей по следующим исходным данным: lOA= 0,03 м; lOB = 0,06 м;
lBC = 0,15 м; lCD = 0,1 м; ω1= 40 рад/с.
Масштабный коэффициент планов скоростей μV = 0,02 [(м/с)/мм].
Скорости точек S3, S4 и D определены по формулам:
= 0,5·VC = 0,5·Pc· μV; = Ps4 · μV; VD = Pd· μV.
Угловые скорости звеньев определены по формулам:
ω3=VC / lBC = Pc·μV / lBC; ω4 =VDC / lCD =cd·μV / lCD,
где Pc, Ps4 и Pd – длины отрезков на плане скоростей, мм;
Скорости точек S3, S4 и D определены по формулам:
= 0,5·VC = 0,5·Pc·μV; = Ps4 ·μV; VD = Pd·μV.
Угловые скорости звеньев определены по формулам:
ω3=VC / lBC = Pc·μV / lBC; ω4 =VDC / lCD =cd·μV / lCD,
где Pc, Ps4 и Pd – длины отрезков на плане скоростей, мм; lBC = 0,15 м и lCD = 0,1 м – заданные размеры звеньев, мм.