

Министерство образования и науки Российской Федерации
ФГАОУ ВПО Уральский федеральный университет им. первого Президента России Б.Н. Ельцина
Кафедра «Детали машин»
Оценка за проект
Члены комиссии:
Строгальный станок анализ и синтез механизмов
К урсовой
проект
по
теории механизмов и машин
урсовой
проект
по
теории механизмов и машин
Пояснительная записка
Руководитель Кордюков И. Г.
Студент Савкин С.В.
гр. М-290101
Екатеринбург 2011
Оглавление
1.Введение 3
2. Задание на проектирование 3
3.Структурный анализ рычажного механизма 4
4.Кинетический анализ рычажного механизма 6
4.1. Построение положений звеньев 6
4.2 Определение скоростей звеньев механизма 7
4.3. Определение ускорений точек звеньев механизма. 9
5. Кинетостатический анализ механизма. 12
5.1. Определение сил, действующих на звенья механизма в 1-ом положении. 12
5.2. Определение реакций в кинематических парах. 13
5.3. Силовой расчет входного звена. 15
5.4. Определение уравновешивающей силы методом Жуковского. 16
6. Динамический расчет механизма 16
6.1.Приведение сил, построение диаграммы работ и их разностей. 16
6.2Приведение моментов инерции 19
6.3. Расчет маховика 20
6.3.1. Расчет маховика с помощью диаграммы Виттенбауэра: 20
6.3.2. Расчет маховика по методу Мерцалова 21
7. Геометрические параметры зацепления.Расчет делительной окружности 23
8. Синтез кулачкового механизма с поступательно вращающимся толкателем с роликом. 26
9.Заключение 30
Библиографический список: 31

1.Введение
Строгальные станки применяются для обработки плоских поверхностей резанием. Широкое распространение в машиностроительной промышленности получили поперечно-строгальные станки с кулисными механизмами.
Целью проекта является кинематический и динамические анализ и синтез машины-строгального станка, который включает следующие разделы:
а) структурный анализ рычажного механизма;
б) кинематический анализ рычажного механизма;
в) определение приведенного момента инерции маховика, обеспечивающего заданный коэффициент неравномерности хода машины;
г) синтез эвольвентного зубчатого зацепления
е) синтез кулачкового механизма
2. Задание на проектирование
Кинематическая схема рычажного механизма показана на рис. 1 Диаграмма технологической силы, действующей на ползун D, изображена на рис. 2
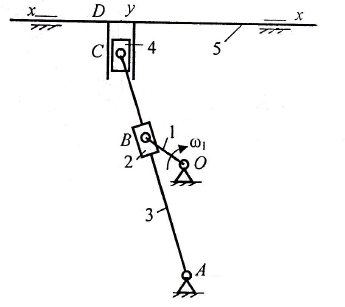
Рис. 1. Кинематическая схема рычажного механизма

Рис. 2 Диаграмма сил полезного сопротивления
Исходные данные для проекта приведены в таблице 1
Таблица 1
|
K |
OA/AC |
H |
h |
|
|
|
|
|
|
m, мм |
1,6 |
1,7 |
0,4 |
1,2AC |
0,2 |
200 |
80 |
12 |
50 |
1000 |
18/36 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
200 |
1,3 |
20 |
65 |
|
4000 |
50 |
1/20 |
|
|
|
|














