3.Структурный анализ рычажного механизма
Кинематическая схема рычажного механизма показана на рис 1.
Механизм плоский рычажный.
Для этого механизма: n = 5; p5 = 7; p4 = 0.
Степень подвижности плоского механизма определяется по формуле
П. Л. Чебышева:
W = 3 n – 2 p5 ─ p4 = 3∙5 ─ 2∙7 – 0 = 1,
где n ─ число подвижных звеньев;
p5 ─ число пар пятого класса;
p4 ─ число пар четвёртого класса.
Согласно полученному результату для определенности движения всех звеньев механизма необходимо иметь одно входное звено.
Разложение механизма на группы Ассура показано на рис. 3
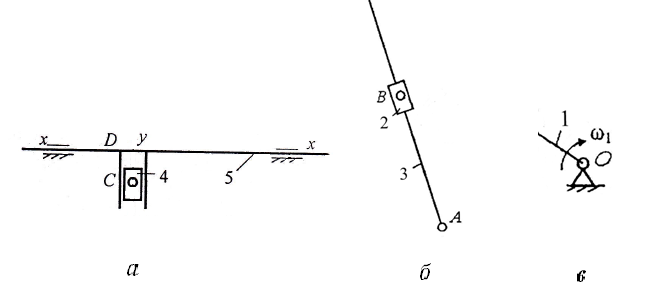
Рис. 3. Строение механизма:
а ─ группа Ассура 2-го класса, 5-го вида, 2-го порядка;
б ─ группа Ассура 2-го класса, 3-го вида, 2-го порядка;
в ─ механизм 1-го класса или группа начальных звеньев
Определим степень подвижности каждой группы в отдельности:
а) группа Ассура 2-го класса, 5-го вида:
W = 3n - 2p5 - p4 = 3∙2 - 2∙3 - 0 = 0,
б) группа Ассура 2-го класса, 3-го вида:
W = 3n - 2p5 - p4 = 3∙2 - 2∙3 – 0 = 0,
в) механизм 1-го класса:
W = 3n - 2p5 - p4 = 3∙1 - 2∙1 – 0 = 1.
Вывод: рассматриваемый механизм является механизмом 2-го класса.
4.Кинетический анализ рычажного механизма
4.1. Построение положений звеньев
Определим неизвестные линейные размеры из подобия треугольников
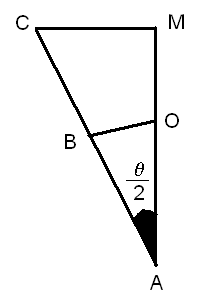

Sin(23,5) = 0,4


Отсюда: OA=0,8м
∆CMA ∞ ∆OAB, отсюда:
 → BO
= 0,32 м
→ BO
= 0,32 м
На плане механизма отобразим входное звено OB отрезком 21 мм
Масштабный коэффициент планов механизма:
(AC) = CA:Ks = 133,3 мм
(OA) = OA:Ks = 53,3 мм
(BO) = BO:Ks = 21,3 мм
4.2 Определение скоростей звеньев механизма
Для примера рассмотрим положение 1.

Скорость т. B1:
VB1
=
W1 LBO
=
104,7
0,32
= 33,5 м/с
LBO
=
104,7
0,32
= 33,5 м/с
 ,т.к.
объединены общей вращательной парой
,т.к.
объединены общей вращательной парой

Скорости остальных точек находятся путем построения плана скоростей.
Отложим

равен:
Для 1-ого положения:
Для
получения скорости
 составим систему:
составим систему:


 ,направлен
⊥
к
BO
,направлен
⊥
к
BO

 ⊥
к
AC
⊥
к
AC
Скорости т. С находим из теоремы подобия:




 ,
т.к. объеденены общей вращательной парой
,
т.к. объеденены общей вращательной парой
Для
нахождения скорости
 воспользуемся уравнением:
воспользуемся уравнением:



 XX
XX

Определение скоростей центров тяжести звеньев производится с помощью теоремы подобия:




Определение угловых скоростей звеньев для 1-ого положения:


4.3. Определение ускорений точек звеньев механизма.
Ускорение
точки



Принимаем
длину отрезка
 Тогда
масштабный коэффициент плана ускорений:
Тогда
масштабный коэффициент плана ускорений:
 м/с2мм
м/с2мм
Ускорение т. B2:

Ускорение т. B3 находим из системы уравнений:
1-ое уравнение:

Относительное ускорение:

Кариолисово ускорение:

Графическое
изображение (
Направление
 получаем
поворотом
получаем
поворотом
 на
на в сторону поворота кулисы OB.
в сторону поворота кулисы OB.
2-ое уравнение:




Графическое
изображение
 мм
мм
Модуль
ускорения

Ускорение ac3 находим из теоремы подобия:

Графическое
изображение

Ускорение aD находим из уравнения:




Модуль
ускорения

Определение ускорений центров тяжести звеньев проводится с помощью теоремы подобия:

Определим угловые ускорения звеньев.


 определяем
из диаграммы ускорений.
определяем
из диаграммы ускорений.


Направление
ускорения
 определяется по направлению вектора
,
перенесенного в т.B.
определяется по направлению вектора
,
перенесенного в т.B.
Для 7-ого положения:

Графическое
изображение

Графическое
изображение


Графическое
изображение

Ускорения силы тяжести звеньев:


Угловые ускорения звеньев: