

36. Напишите уравнение кинетической энергии для заданного механизма.
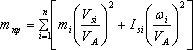
Для i-го звена, совершающего сложное движение (например, для шатуна кривошипно-ползунного механизма), кинетическую энергию можно выразить формулой
![]() ,
,
где первое слагаемое правой части – это кинетическая энергия поступательного движения центра масс звена; второе слагаемое – кинетическая энергия вращательного движения; mi – масса звена; Vsi – скорость центра масс; Jsi – момент инерции звена относительно центра масс; – угловая скорость звена.
Для всего механизма кинетическая энергия равна сумме кинетических энергий всех звеньев механизма:
![]()
где n – количество подвижных звеньев.
37. Что такое приведенная масса и приведенный момент инерции механизма.
Условно заменим механизм его динамической моделью. Например, кривошипно-ползунный механизм (рис. 4.2) заменим динамической моделью, состоящей из стойки и кривошипа.
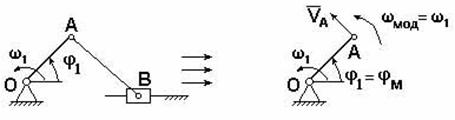
Здесь ОА – звено приведения механизма, в котором как бы сосредоточена инертность всех звеньев механизма, А – точка приведения.
Уравнение (1) умножим и разделим на квадрат скорости точки приведения VA:
![]()
Выражение в квадратных скобках имеет размерность массы (кг) и называется приведенной массой mпр механизма в точке А.
Тогда
![]()
где
 .
(2)
.
(2)
Приведенной массой механизма называется такая условная масса, которая как бы сосредоточена в точке приведения механизма, кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма.
Приведенный момент инерции
Так
как
![]() ,
где
,
где
![]() – длина звена приведения,
– длина звена приведения,
![]() – его угловая скорость, то кинетическую
энергию механизма можно выразить
уравнением
– его угловая скорость, то кинетическую
энергию механизма можно выразить
уравнением
![]()
где приведенный момент инерции механизма
.
 (3)
(3)
Приведенным моментом инерции механизма называется такой условный момент инерции, которым как бы обладает звено приведения относительно оси вращения, кинетическая энергия которого (при таком моменте инерции) равна сумме кинетических энергий всех звеньев механизма.
Величины mпр и Jпр не являются постоянными для данного механизма, а меняют свое численное значение в зависимости от положений звеньев, так как звенья меняют свои скорости.
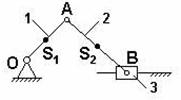
Пример 1.
Определить
приведенную массу и приведенный момент
инерции для заданного положения
кривошипно-ползунного механизма (рис.
5.3), если известны положения центров
масс звеньев (S1 и S2), линейные и угловые
скорости звеньев и центров масс звеньев:
![]() ,
,
![]() ,
,
![]() и – скорости центров масс кривошипа,
шатуна и ползуна,
и – скорости центров масс кривошипа,
шатуна и ползуна,
![]() и
и
![]() – угловые скорости кривошипа и шатуна.
– угловые скорости кривошипа и шатуна.
Пусть кривошип 1 – звено приведения, А – точка приведения.
Приведенная масса механизма согласно (4.2) вычисляется по формуле
![]()
,
а приведенный момент инерции согласно (3) – по формуле
![]() .
.
38.