

7. Понятия о мертвых положениях в кривошипно – ползунных механизмах и способы их прохождения. Синтез этих механизмов.
В том случае, если ведущим звеном является ползун, происходит преобразование поступательного движения ползуна во вращательное движение кривошипа. Имеется два положения, когда кривошип и шатун находятся на одной прямой:
(
 1)
(2)
1)
(2)
Работу т. А можно найти по формуле:
dAA
= F ∙ dS
∙ cos(![]() ).
).
Так как угол между направлением скорости и силы составляет 90˚,
то dAA = 0. Поэтому сила F не может вывести механизм из мёртвого положения.
Существует два способа прохождения мёртвых положений:
1) кинематический;
2) динамический.
Кинематический способ
Он предусматривает использование нескольких одинаковых механизмов, кривошипы которых соединены общей осью и расположены под углом друг к другу.
Аналогичным образом решается вопрос в многоцилиндровом двигателе.
Динамический способ
Он предусматривает соединение вала кривошипа с маховиком.
Маховик – колесо, имеющее значительную массу, основная часть которой (≈90%) сосредоточена в ободе. Маховик является аккумулятором энергии. Когда механизм находится не в мёртвом положении, он запасает энергию и отдаёт её при прохождении мёртвых положений. Маховики также используются для обеспечения привода механизма при ярко выраженной неравномерной нагрузке.
Например: прессы, штампы, ножницы для резки металла.
8. Кривошипно – кулисный механизм. Общие сведения. Применение. Исследование кинематики и синтез этих механизмов.

Кулисный механизм
Кулисный механизм – 4-хзвенный шарнирный механизм, ползун которого перемещается по подвижной направляющей. В зависимости от соотношения длин звеньев кулиса может качаться или вращаться.
x = A0O – AO = r – r ∙cosφ = r ∙(1 - cosφ);
V = ω ∙ r ∙ sinφ ;
W = r ∙ ω2 ∙ cosφ.
В зависимости от величины е при вращательном движении ведущего звена ВС кулиса АD будет совершать вращательное или возвратно-качательное движение. Подобные механизмы используются в приводе строгальных станков.
Кинематические особенности механизма.
Точка D связана с механизмом привода режущего инструмента. Ходу влево т. D соответствует угол φ1, а вправо – φ2.
φ = ω ∙ t ;
φ1 = ω1 ∙ t1 ;
φ2 = ω2 ∙ t2 ;
![]() ;
;
Vл < Vп.
Примечание: равномерное перемещение т. D влево и вправо с помощью подобных механизмов не может быть обеспечено.
9. Шарнирный 4-х звенный механизм, кинематика и синтез его по коэффициенту изменения скорости «к».
10. Трение в кинематических парах. Виды трения, трение на горизонтальной плоскости.
Коэффициент трения. Угол и конус трения.
В ряде механизмов силы трения являются фактором, определяющим их функционирование.
Фрикционные передачи (ременные).
Передачи «винт-гайка».
Различают основные виды внешнего трения:
сухое, полусухое, полужидкостное, жидкостное.
Трение покоя и движения. Трение качения и скольжения (по кинематическому признаку).
Трение со смазочным материалом и без него.
Внешнее трение – сопротивление относительному перемещению, возникающее между двумя телами в зонах соприкосновения их поверхностей по касательной к ним.
Сухое трение
Имеет место, когда микронеровности одной поверхности взаимодействуют с микронеровностями другой поверхности.
Когда имеет место жидкостное трение, то зазор между деталями больше суммы высот микронеровностей.
Полусухое трение – часть наиболее высоких неровностей взаимодействует друг с другом.
На взаимодействующих поверхностях имеется плёнка адсорбированной плёнки.
Между сухим, полусухим и полужидкостным трением имеется количественная разница, а между жидкостным трением – качественная разница.
Экспериментально доказано:
V
Fn
FT
A
Fn
FT
FT
= A + f
· Fn
– уравнение Амонтона - Кулона
f –
коэффициент трения








Основные положения процесса сухого трения:
коэффициент трения считается постоянным в определённом диапазоне скоростей и нагрузок;
сила трения направлена в сторону, противоположную направлению относительного движения;
сила трения покоя больше силы трения движения;
при увеличении скорости сила трения уменьшается;
при увеличении контактного давления сила трения увеличивается;
при увеличении времени взаимодействия тел сила трения покоя увеличивается.
11. Трение на наклонной плоскости

FТР.П. = G ∙ sinα ;
FП. = G ∙ cosα ;
![]() .
.
Равновесие будет иметь место, пока tgα ≤ tgφП .
Обозначим: tgφП = fП – коэффициент трения покоя;
φП – угол трения покоя.
12. Трение в клинчатом ползуне
FТР = (F1n + F2n) ∙ f = 2 ∙ F1n ∙ f ;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
f ’ – приведённый коэффициент трения клинчатого ползуна.
13. Трение качения

При качении эпюра контактного давления искажается:
Мтр = Q ∙ K = Мдв .
Заменим момент парой сил:
F дв
∙ r = K
∙ Q ;
дв
∙ r = K
∙ Q ;
![]()
14. Трение гибких тел. Формула Эйлера и ее применение в технике.
Рассмотрим
идеально гибкое и нерастяжимое тело,
т.е. тело, совершенно не деформирующееся
под действием растягивающей силы и не
оказывающее никакого сопротивления
при его перегибе, которое огибает
неподвижный цилиндр. Охват цилиндра
происходит по дуге ab с центральным углом
a (рис. 17.1). На тело действуют силы S1 и S2,
для движения его по цилиндру с равномерной
скоростью необходимо соблюдение условия
![]() ,
,
где F – сила трения между гибким телом и цилиндром.
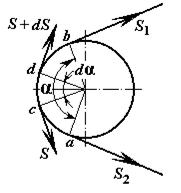
Так как сила трения распределена на дуге ab соприкосновения гибкого тела с цилиндром, то натяжение гибкого тела от точки a набегания его на цилиндр до точки b сбегания его с цилиндра возрастает по некоторому закону от S2 до S1. В точке с бесконечно малой дуги cd натяжение достигает некоторой величины S, в точке d натяжение увеличивается до S + dS.
Бесконечно
малая сила трения на дуге cd, обуславливающая
увеличение натяжения на величину dS и
поэтому равная dS, может быть выражена
следующим образом:
![]() ,
,
где f – коэффициент трения; dRn – бесконечно малая сила, нормальная к поверхности трения.
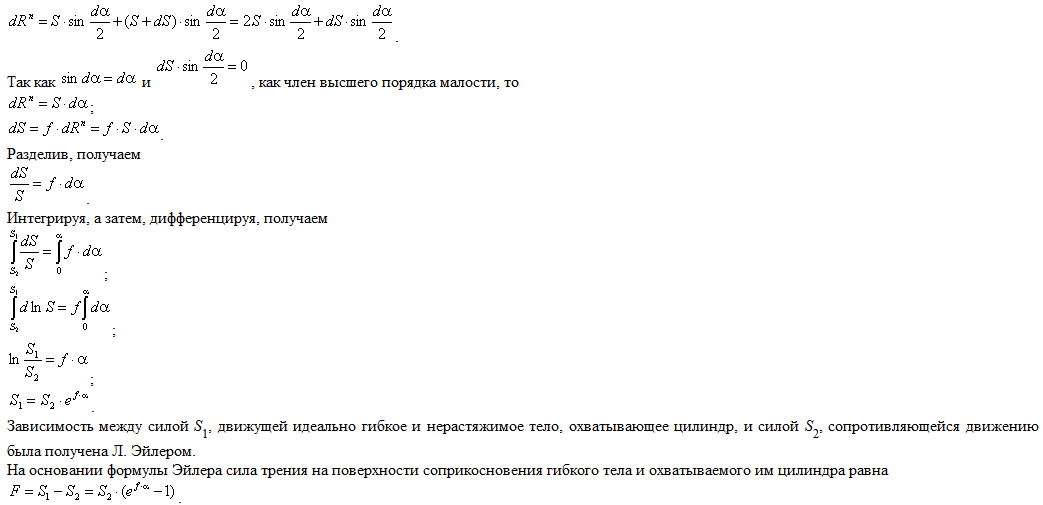 Величина
силы dRn создается проекциями натяжений
S и S + dS на радиус, проведенный в середину
дуги cd:
Величина
силы dRn создается проекциями натяжений
S и S + dS на радиус, проведенный в середину
дуги cd: