

39. Понятие о средней скорости и о коэффициенте неравномерности в машинах.
Коэффициентом неравномерности средней скорости kw называется отношение средней скорости выходного звена на обратном ходе w 3ср ох к средней скорости прямого хода w 3ср
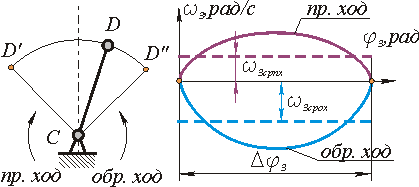
tох и tпх - соответственно время обратного и время прямого хода.
При проектировании технологических машин, в которых нагрузка на выходном звене механизма на рабочем или прямом ходе намного больше нагрузки на холостом или обратном ходе, желательно, чтобы скорость выходного звена на прямом ходе была меньше, чем на обратном. С целью сокращения времени холостого хода, тоже необходимо увеличивать скорость при обратном ходе. Поэтому при метрическом синтезе механизма часто надо подбирать размеры звеньев, обеспечивающие заданный коэффициент неравномерности средней скорости.
Для изучения периодических колебаний скоростей во время установившегося движения механизма или машины введем понятие о средней скорости начального звена.
Обозначим
путь, проходимый выбранной на начальном
звене точкой B за один
цикл ее движения от положения I
до положения k, через s.
Будем называть средней скоростью (VСР)Д
скорость такого неравномерного движения,
при котором точка прошла бы путь s
в тот же промежуток времени t,
который требуется и при неравномерном
движении. Так как
![]() ,
то
,
то
 ,
откуда, с учетом того, что
,
откуда, с учетом того, что
![]() ,
получаем
,
получаем
 .
Действительную среднюю скорость часто
заменяют средней арифметической
скоростью VСР и
полагают
.
Действительную среднюю скорость часто
заменяют средней арифметической
скоростью VСР и
полагают
![]() ,
где
,
где
![]() и
и
![]() - максимальные и минимальные значения
скорости точки B.
- максимальные и минимальные значения
скорости точки B.
40.
41-42. Синтез кривошипно – ползунного (кулисного) механизма.
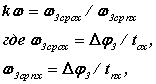
Одной из кинематических характеристик стержневого механизма может служить коэффициент изменения скорости хода KV представляющий собой отношение средней скорости холостого хода VХ.Х. к средней скорости рабочего хода VР.Х.
При равномерном движении кривошипа коэффициент KV равен:
![]()
где
S – ход ползуна;
![]() и
и
![]() - время рабочего и холостого хода;
- время рабочего и холостого хода;
![]() - угловая скорость кривошипа;
- угловая скорость кривошипа;
![]() - угол размаха кулисы.
- угол размаха кулисы.
При
заданном
![]() можно определить
или наоборот. Используя дополнительные
конструктивные соображения, можно
определить размеры всех звеньев
механизма.
можно определить
или наоборот. Используя дополнительные
конструктивные соображения, можно
определить размеры всех звеньев
механизма.
Вид синтеза – кинематический; способ – графо-аналитический.
43. Кулачковый механизм.
Кулачковым называется механизм, в состав которого входит кулачок (звено, рабочая поверхность которого имеет переменную кривизну). Зубчатый механизм можно рассматривать как многокулачковый механизм.
Кулачковые механизмы широко применяются в двигателях внутреннего сгорания, в текстильных машинах, в полиграфических машинах, в машинах – автоматах различного назначения, в разнообразных приборах. Достоинство кулачковых механизмов – возможность воспроизводить почти любой закон движения, причем синтез их относительно несложен. Недостатки – наличие высшей кинематической пары и, как следствие, ограниченная долговечность, сложность изготовления, высокая стоимость.
Можно выделить следующие типы кулачковых механизмов:
а) по движению кулачка:
- с вращающимся кулачком;
- с поступательно движущимся кулачком;
б) по движению толкателя:
- с поступательно движущимся толкателем;
- с вращающимся (коромысловым) толкателем;
в) по форме толкателя:
- с точечным толкателем;
- с роликовым толкателем;
- с плоским (тарельчатым) толкателем;
- с грибовидным толкателем.
Эта простая классификация позволяет уже по названию механизма представить его конструкцию. Кроме того (как и любая кинематическая цепь) кулачковый механизм может быть пространственным и плоским.
В ряде технологических машин, таких как текстильные, полиграфические и другие, закон движения полностью определен той операцией, для выполнения которой механизм предназначен. В таком случае выбор закона движения отпадает. Однако во многих случаях, например, в машинах – автоматах, автомобильных двигателях технологическим процессом задаются только фазовые углы и величины перемещений. Внутри каждой фазы подъема и опускания закон движения может быть произвольным, Тогда закон движения выбирается таким, чтобы механизм был оптимальным в динамическом отношении.
Простейшим законом является закон постоянной скорости (рисунок).
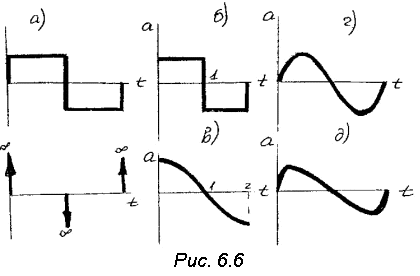
Скорость в точке 1 теоретически мгновенно изменяет направление, следовательно ускорение стремится к бесконечности. Практически из – за упругости звеньев изменение направления происходит за некоторый малый промежуток времени, поэтому ускорение не бесконечно, но велико, а следовательно и очень велика сила инерции. Это явление носит название жесткого удара. Такой закон движения может быть применен только для малоответственных тихоходных механизмов.
Жесткого удара можно избежать, если принять закон постоянного ускорения. Однако здесь мгновенно изменяется направление ускорения и следовательно – направление силы инерции. Это тоже проявляется в виде удара – “ мягкого удара”, который приводит к колебаниям и дополнительным динамическим нагрузкам. При применении закона косинусоидального ускорения в точке 1 сила инерции равна нулю, но мягкий удар в точке 2 все же происходит, если далее следует выстой толкателя.
Безударными будут синусоидальный закон и полиноминальный закон. Однако применение двух последних законов предъявляет очень высокие требования к точности изготовления кулачков.
Раньше обычно применялись кулачки, очерченные дугами сопряженных окружностей. Несмотря на то, что профиль таких кулачков был абсолютно гладким, в точках сопряжения происходили мягкие удары, так как имело место мгновенное изменение радиусов кривизны.
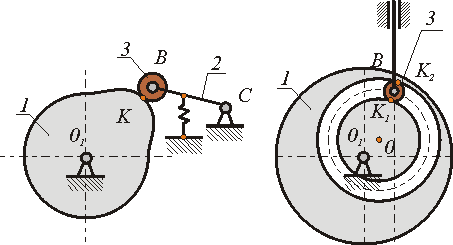
Кулачковые механизмы с силовым и с геометрическим замыканием высшей пары
Примеры схем:
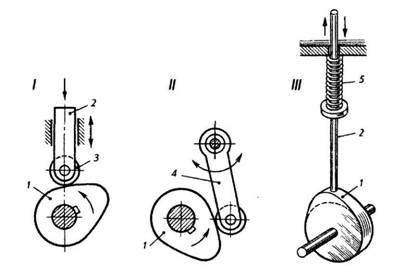
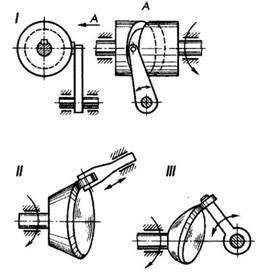
Плоские Пространственные
I – с толкателем (штанга поступат.)
II – с коромыслом (вращат.)
III – толкатель с плоской пов-тью, замыкание обеспечивается пружиной 5
I - цилиндрический кулачок с профилем в виде паза, в который входит ролик толкателя
II – конические и сферич. Кулачки (сложные и точные приборы).