

Кинематика поступательного движения. Вектор скорости и ускорения.
Положение материальной точки в пространстве в данный момент времени определяется по отношению к какому-либо другому телу, которое называется телом отсчета. С ним связывается система отсчета – совокупность системы координат и часов, связанных с телом, по отношению к которому изучается движение каких-нибудь других материальных точек.
При кинематических исследованиях все системы отсчета равноправны (декартовая, полярная).
 В
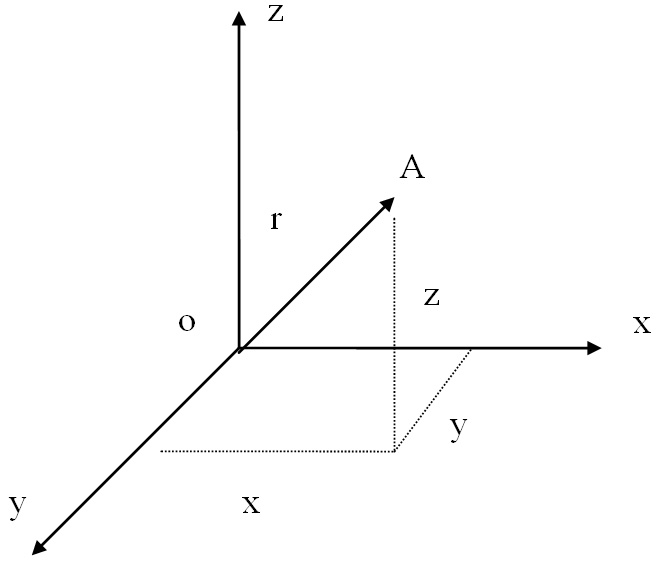
декартовой системе координат положение
точки А в данный момент времени по
отношению к этой системе определяется
тремя координатами х, у и z,
или радиусом-вектором r
В
декартовой системе координат положение
точки А в данный момент времени по
отношению к этой системе определяется
тремя координатами х, у и z,
или радиусом-вектором r
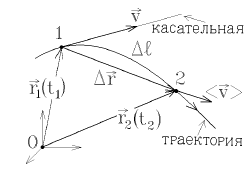
Важнейшей кинематической характеристикой движения является скорость. Скоростью частицы называется векторная величина. определяемая равенством

иначе говоря, скорость — это производная от радиус-вектора по времени. Из определения следует. что скорость о направлена по касательной к траектории
Производная скорости частицы по времени. т.е. вектор
называется ускорением.
Вычисление пройденного пути. Средние значения
При
малых ∆t![]()
Весь путь s, пройденный точкой, можно представить как сумму путей: ∆s1, ∆s2, …, ∆sN пройденных за соответствующие промежутки времени ∆t;
![]()
каждое из слагаемых ∆sі (і — любое число от 1 до N) может быть приближенно представлено в виде
![]()
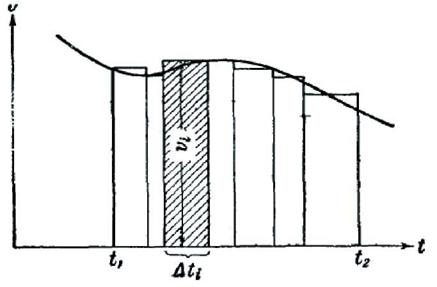
где ∆tі — промежуток времени, за который был пройден ∆sі, a vi — одно из значений скорости за время ∆tі. Таким образом,

В пределе при стремлении всех ∆tі к нулю (количество промежутков ∆tі будет при этом неограниченно возрастать) сумма, стоящая справа, станет точно равна s:
![]()
Величину пройденного пути можно представить как площадь фигуры, которая ограничена кривой зависимости величины скорости v от времени t. График функции v=v(t) (рис. 22).
Движение, при котором скорость, изменяясь как угодно по направлению, остается постоянной по величине, называется равномерным.
При равномерном движении все υі в формуле будут одинаковы и равны v.
![]()
Сумма элементарных промежутков времени дает время t, за которое точка проходит путь s.
![]()
при равномерном движении скорость равна пути s деленному на время t за которое он пройден:
![]()
Скорость при равномерном движении равна по величине пути, проходимому движущейся точкой за единицу времени.
Кинематика вращательного движения. Связь между угловыми и линейными скоростями.
Связь
между линейной и угловой скоростями.
Скорость точки, движущейся по окружности,
часто называют линейной скоростью,
чтобы подчеркнуть ее отличие от угловой
скорости.
При
вращении твердого тела разные его точки
имеют неодинаковые линейные скорости,
но угловая скорость для всех точек
одинакова.
Между линейной
скоростью любой точки вращающегося
тела и его угловой скоростью существует
связь. Точка, лежащая на окружности
радиусом R, за один оборот пройдет
путь
![]() .
Поскольку время одного оборота тела
есть период T, то модуль линейной
скорости точки можно найти так:
.
Поскольку время одного оборота тела
есть период T, то модуль линейной
скорости точки можно найти так:
![]()
Так
как
![]() ,
то
,
то
![]()
Из этой формулы видно, что, чем дальше расположена точка тела от оси вращения, тем больше ее линейная скорость. Модуль ускорения точки тела, движущейся равномерно по окружности, можно выразить через угловую скорость тела и радиус окружности:
![]()
Следовательно,
![]()
Чем дальше расположена точка твердого тела от оси вращения, тем большее по модулю ускорение она имеет.