

5. Композиція і декомпозиція складних об'єктів і систем
При розгляді складних об'єктів і систем, застосування методу «чорного ящика" для всієї системи разом може дати достатньо грубу модель. У цьому випадку є сенс розбити систему, що досліджується, на більш прості підсистеми (провести декомпозицію системи), знайти модель цих більш простих підсистем, а вже потім, по визначених правилах, звести ці підсистеми в одну модель, що буде описувати їх взаємодію в рамках всієї системи (тобто провести композицію системи з її окремих елементів на основі існуючих зв'язків). Метод, що дозволяє отримати модель системи на основі моделей підсистем, що її складають, носить назву метода еквівалентних перетворень систем.
5.1 Еквівалентні перетворення моделей систем
Розглянемо цей метод більш детально на основі лінійних моделей, що найбільш часто використовуються у дослідженнях.
1.Модель без додаткових зв’язків
Найбільш типовим підходом до опису систем є розглядання системи у вигляді одного "чорного ящика", що має лише одну вхідну та одну вихідну змінні, без додаткових зв'язків. При цьому можливі два випадки:
а) Модель, що пов’язує абсолютні значення Y і X, тобто:
Y = а0+ а1 X
Її структура при цьому матиме наступний вигляд (рис.5.1):
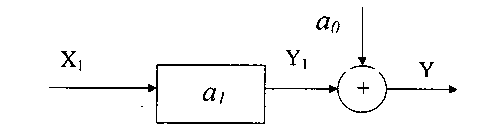
Рис.5.1 Структура найпростішої лінійної моделі системи
Дійсно, згідно с рис.5.1 можна стверджувати, що
![]()
а0
- початкове
значення Y
(при
![]() =
0); а1
- коефіцієнт
впливу на Х.
=
0); а1
- коефіцієнт
впливу на Х.
в) Модель, що пов’язує варіації х та у відносно сталого стану, що описуються значеннями X0 та Y0.
У цьому випадку можна записати абсолютні значення у вигляді:
(В якості
X0
та
Y0
можуть
бути прийняті середні значення змінних
та
![]() ).
).
З урахуванням прийнятих позначок можна записати:

![]()
![]() -
передаточний
коефіцієнт моделі у режимі дослідження
варіацій (а1),
який позначається зазвичай як k1
. В
такому
розгляді структура системи матиме
вигляд рис. 5.2.
-
передаточний
коефіцієнт моделі у режимі дослідження
варіацій (а1),
який позначається зазвичай як k1
. В
такому
розгляді структура системи матиме
вигляд рис. 5.2.
Рис.5.2 Структура найпростішої лінійної моделі системи при розгляданні лише варіацій змінних
Відмітимо, що зміни х повинні бути досить повільними, для того щоб не брати до уваги запізнення зміни вихідної величини Y, що можуть мати місце від зміни вхідної величини X.
2. Послідовне підключення моделей підсистем
а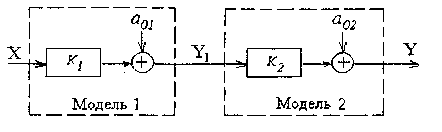 )
Для абсолютних значень (див. рис.5.3):
)
Для абсолютних значень (див. рис.5.3):
Рис.5.3 Послідовне з'єднання моделей підсистем
Нехай
модель 1 має вигляд
![]() модель 2:
модель 2:
![]()
Записуємо модель 2 з урахуванням впливу моделі 1:
![]()
де
![]()
в) Для варіацій:

Тоді:
![]()
О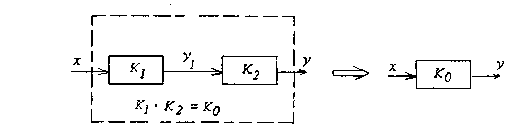 тже,
модель для варіацій матиме вигляд
рис.5.4.
тже,
модель для варіацій матиме вигляд
рис.5.4.
Рис.5.4 Модель для варіацій змінних при послідовному з'єднанні моделей підсистем
У загальному випадку при п послідовно підключених моделей:
а) Для абсолютних значень

в) Для варіацій у та х
Пропонуємо читачам самим довести справедливість вказаних формул.
П аралельне підключення моделей (рис.5.5).
Рис.5.5 Паралельне з'єднання моделей підсистем
Для подібних структур систем можна записати:
У загальному випадку п підключених паралельно моделей можна записати:
4. Модель зі зворотнім зв'язком (рис.5.6)
На рис.5.6 зазначено k0с - коефіцієнт передачі зворотного зв'язку. Якщо
![]() - величина
небалансу моделі зі зворот зв'язком,
для зазначеної системи можна записати:
- величина
небалансу моделі зі зворот зв'язком,
для зазначеної системи можна записати:
Р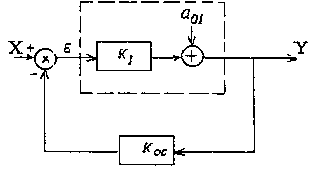 ис.
5.6. Структура моделі зі зворотнім зв’язком
ис.
5.6. Структура моделі зі зворотнім зв’язком
Для варіацій х та у відповідно маємо:
![]()
У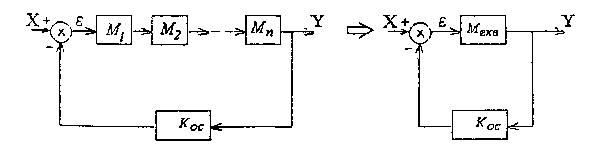 випадку, коли зворотній зв'язок охоплює
дві і більше послідовно підключені
моделі (див. рис.5.7), необхідно, перш за
все, виконати еквівалентні перетворення
послідовних підсистем, потім визначити
випадку, коли зворотній зв'язок охоплює
дві і більше послідовно підключені
моделі (див. рис.5.7), необхідно, перш за
все, виконати еквівалентні перетворення
послідовних підсистем, потім визначити
Рис.5.7 Структура моделі з п послідовно з'єднаних підсистем
загальну модель системи як моделі зі зворотним зв'язком.
Наприклад при п = 2 (рис.5.8) можна записати:
![]()
Р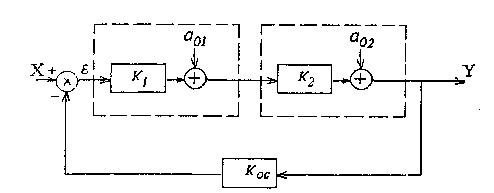 ис.5.8
Модель зі зворотним зв'язком, що містить
дві послідовно з'єднані підсистеми.
ис.5.8
Модель зі зворотним зв'язком, що містить
дві послідовно з'єднані підсистеми.
У практиці дослідника часто цікавить величина небалансу моделі зі зворотнім зв'язком. У цьому випадку, використовуючи загальні правила еквівалентного перетворення і розглядаючи в якості вихідної змінної ε для системи з однією моделлю, запишемо:
![]()
Надамо читачам можливість самостійно перевірити справедливість зазначених формул.