

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ БЕРДИЧІВСЬКИЙ ПОЛІТЕХНІЧНИЙ КОЛЕДЖ
М А Т Е Р І А Л И до самостійної роботи студентів з „Технологічного оснащення”. (Методичний посібник)
Розглянуто та схвалено цикловою комісією спец. дисциплін спеціальності 5.090227 (Обробка матеріалів на верстатах і автоматичних лініях) Рекомендовано до використання у навчальному процесі (Протокол №___ від _____________ ) Голова циклової комісії_______________ Б.І.Мороз
2 0 0 5
|
ЗМІСТ
Стор.
Передмова ..............................................................................................................3
Пам’ятка до користування методичним посібником..........................................4
Змістовний модуль. 1.4. „Затискні механізми”:
Інерційні механізовані пристрої ................................................................5
Механізми підсилювачі ( пнемо – гідро - підсилювачі,
важільні підсилювачі ) ................................................................................7
Змістовний модуль. 1.5. „Настановчо - затискні механізми”:
Призматичні механізми ............................................................................12
Плунжерні механізми................................................................................14
Цангові механізми.....................................................................................15
Затискні механізми з гідропластом .........................................................16
Змістовний модуль. 1.7. „Ділильне та поворотне обладнання”:
Призначення елементів пристроїв для повороту (поділу)
заготовки.....................................................................................................18
Будова фіксаторів .....................................................................................19
Механізми для закріплення поворотних частин пристроїв..................20
Змістовний модуль. 1.10. „Спеціалізовані та універсальні пристрої”:
Пристрої для фрезерних верстатів ...........................................................21
Пристрої для зубооброблюючих довбальних та
протягувальних верстатів..........................................................................25
Поворотні столи і стійки ..........................................................................28
Багатошпиндельні свердлильні головки .................................................31
Список літератури ...............................................................................................34
ПЕРЕДМОВА
Навчальний процес у ВНЗ здійснюється у таких формах:
навчальні заняття;
виконання індивідуальних завдань;
самостійна робота студентів;
практична підготовка;
контрольні заходи.
Самостійна робота студентів є одним із основних засобів оволодіння навчальним матеріалом у час, вільний від обов’язкових навчальних занять.
Зміст самостійної роботи студента над конкретною дисципліною визначається робочою (навчального) програмою дисципліни, методичними матеріалами, завданнями та вказівками викладача.
Навчальний матеріал навчальної дисципліни, передбачений для засвоєння студентом у процесі самостійної роботи, виноситься на підсумковий контроль поряд з навчальним матеріалом, який опрацьовувався при проведенні навчальних занять.
П А М’ Я Т К А
до користування методичним посібником.
Методичний посібник до самостійної роботи студентів з дисципліни „Технологічне оснащення” використовується студентами 3-4-х курсів спеціальності 5.090227 „Обробка матеріалів на верстатах і автоматичних лініях”. Студент самостійно опрацьовує відповідний матеріал, дає відповіді на питання самоконтролю. При необхідності складає конспект вивченого матеріалу.
Для отримання копії того чи іншого аркушу методичного посібника необхідно звернутись до бібліотеки, вказати назву і номер теми, потрібну сторінку. Ксерокопії знімаються з іншого, спеціально призначеного для копіювання методичного посібника.
Забороняється робити будь-які позначки на аркушах робочого комплекту методичного посібника, пошкоджувати аркуші чи вилучати їх з комплекту.
Шановні студенти !
Пам’ятайте, що у наступному році цим комплектом методичного забезпечення самостійної роботи будуть користуватись інші студенти – ваші молодші колеги.
Змістовний модуль 1.4.
„ЗАТИСКНІ МЕХАНІЗМИ”.
План.
Інерційні механізовані пристрої.
Механізми підсилювачі.
Домашнє завдання – скласти конспект матеріалу, що само опрацьовувався.
! За підсумками самостійного опрацювання зазначених питань змістовного модуля 1.4. студент повинен:
знати призначення, особливості, переваги і недоліки інерційних затискних механізмів, класифікацію важільно – шарнірних механізмів.
Вміти пояснити будову і принцип дії інерційного приводу з вантажами, з кульками та механізмів – підсилювачів.
Інерційні механізовані пристрої.
Приводи, в яких силовим джерелом є відцентрова сила інерції деталей, що обертаються, називаються інерційними. Перевагами таких приводів перед іншими є те, що їхня дія не потребує додаткового джерела енергії. Окрім цього, їхня будова, принцип дії та експлуатація досить прості.
Розглянемо два варіанти конструкцій інерційних приводів, що використовуються на токарних верстатах для отримання штовхаючої або тягової сили.
1.1.1.Інерційний привод з вантажами.
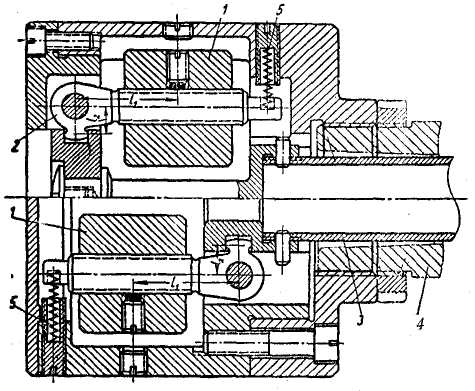
На верхній частині рисунка показана конструкція штовхаючого приводу, а на нижній – тягового.
Вантажі 1 встановлені на довгому плечі шарнірного важеля 2. Коротке плече закріплене з тягою 3, котра проходить через порожнину шпинделя 4 верстата до затискного патрона (на рисунку не показаний). Регулювання сили затиску здійснюється пересуванням вантажів 1 у напрямку їхніх осей. Після зупинки привода вантажі повертаються у вихідне положення (а це призводить до розжиму патрона) за рахунок пружин 5.
Тягове (штовхаюче) зусилля обчислюється за формулою:
![]() ,
,
Wц – відцентрова сила одного вантажу (н);
Q - зусилля опору пружини (н);
l1, l2 – довжини великого і малого плечей важеля (мм);
f - коефіцієнт тертя в шарнірах;
r - радіус вісі шарніра;
n - кількість вантажів;
(Величина
відцентрової сили:
![]() ,
,
де G – вага вантажу;
R – відстань від центру ваги вантажу до вісі привода;
w – кутова швидкість обертання шпинделя).
1.1.2.Інерційний привод з кульками.
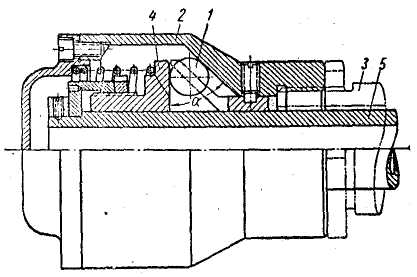
У конструкції цього привода сили інерції кульок 1 заставляють їх втиснутися між планшайбою 2, котра встановлена на задній кінець шпинделя 3 верстата, і шайбою 4 центрального вала 5, що зв’язаний із затискним патроном через порожнину шпинделя.
Сила тяги обчислюється за формулою:
![]() ,
,
де Wц – відцентрова сила, (н);
n – кількість кульок;
α, φ, φ1 – відповідно кут нахилу, робочої поверхні планшайби і кути тертя.
Запитання для самоконтролю.
Які приводи називаються інерційними?
Які переваги мають інерційні приводи над іншими типами приводів?
Як здійснюється регулювання тягової (чи штовхаючої) сили інерційного приводу з грузами?
Від чого залежить величина відцентрової сили грузів в інерційних приводах?
Від чого залежить величина тягового зусилля в інерційному приводі з кульками?