

7. Коррекция цифровых систем управления
Возможности коррекции цифровых АСУ значительно шире, чем для непрерывных систем. Это объясняется тем, что коррекция дискретных систем может быть осуществлена как с помощью непрерывных, так и с помощью цифровых корректирующих устройств (регуляторов).
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
Непрерывные корректирующие устройства, изменяющие НЧ системы, реализуются на практике активными или пассивными фильтрами, которые включаются либо последовательно с НЧ, либо вводятся в контур обратных связей (рис. 37, 38).

Рис. 37. Коррекция дискретной САУ с помощью последовательного
непрерывного корректирующего звена
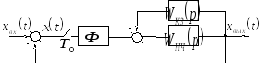
Рис. 38. Коррекция дискретной САУ с помощью непрерывного
корректирующего звена в цепи обратной связи
Рассмотрим пример расчета непрерывного последовательного регулятора.
Пример 27. Введение корректирующего устройства в систему (рис. 37) с передаточной функцией
![]()
и величиной
интервала квантования
![]() должно обеспечивать время регулирования
должно обеспечивать время регулирования![]() и перерегулированием
и перерегулированием![]() .
.
Дискретная передаточная функция разомкнутой нескорректированной САУ:
![]()
В соответствии с вышеизложенной методикой вводим новую переменную w, осуществляя переход отz-изображений кw-изображениям:

Для
построения логарифмических частотных
характеристик используем абсолютную
псевдочастоту
![]() .
При
.
При![]() имеем:
имеем:
![]()
Тогда выражение для комплексной амплитудно-фазовой характеристики нескорректированной разомкнутой системы:
![]()
Соответствующие
этому выражению логарифмическая
амплитудно-частотная
![]() и фазо-частотная
и фазо-частотная![]() характеристики приведены на рис. 39. По
их виду на основании критерия Найквиста
можно сделать заключение, что
нескорректированная система находится
на границе устойчивости.
характеристики приведены на рис. 39. По
их виду на основании критерия Найквиста
можно сделать заключение, что
нескорректированная система находится
на границе устойчивости.
Далее
необходимо построить логарифмическую
амплитудно-частотную
![]() и фазо-частотную
и фазо-частотную![]() характеристики скорректированной
системы, для чего необходимо воспользоваться
соответствующими номограммами,
разработанными для коррекции непрерывных
систем. С их помощью определена частота
среза и запас устойчивости по амплитуде
для ЛАХ скорректированной системы:
характеристики скорректированной
системы, для чего необходимо воспользоваться
соответствующими номограммами,
разработанными для коррекции непрерывных
систем. С их помощью определена частота
среза и запас устойчивости по амплитуде
для ЛАХ скорректированной системы:![]() и
и![]() дб.
Характеристики
дб.
Характеристики![]() и
и![]() приведены на рис. 39.
приведены на рис. 39.
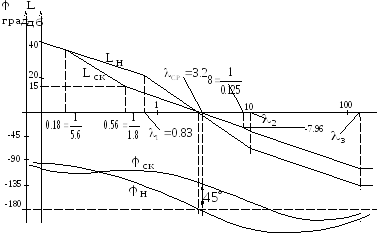
Рис. 39. Логарифмические амплитудно-частотные и фазо-частотные характеристики к примеру 27
Для
обеспечения физической реализуемости
корректирующего устройства не в полной
мере обеспечен требуемый запас
устойчивости по амплитуде в высокочастотной
части среднечастотного участка ЛАХ. С
этой же целью в частотной характеристике
скорректированной системы сохранен
сомножитель
![]() и приведена апериодическая составляющая:
и приведена апериодическая составляющая:
![]()
При этом выражение для комплексной амплитудно-фазовой характеристики скорректированной разомкнутой системы имеет вид:
![]()
Осуществляя
обратную замену
![]() ,
получим:
,
получим:
![]()
Используя
подстановку
![]() ,
определим дискретную передаточную
функцию скорректированной разомкнутой
системы вz-форме:
,
определим дискретную передаточную
функцию скорректированной разомкнутой
системы вz-форме:
![]()
Непосредственно
из полученного выражения искомую
передаточную функцию корректирующего
устройства
![]() определить нельзя. Поэтому воспользуемся
тем, что:
определить нельзя. Поэтому воспользуемся
тем, что:
![]()
Следовательно:
![]()
или
![]() (53)
(53)
Далее
необходимо тем или иным способом найти
функцию
![]() ,Z-изображение которое
равно выражению, стоящему в правой части
равенства (53), т.е.:
,Z-изображение которое
равно выражению, стоящему в правой части
равенства (53), т.е.:
![]() (53)
(53)
после чего искомая передаточная функция непрерывного корректирующего звена определяется следующим образом:
![]() (54)
(54)
В ряде
случаев для нахождения функции
![]() достаточно воспользоваться таблицамиZ-преобразования. Кроме
того, можно применить следующую методику:
предварительно найдем решетчатую
функцию
достаточно воспользоваться таблицамиZ-преобразования. Кроме
того, можно применить следующую методику:
предварительно найдем решетчатую
функцию![]() ,Z-изображение которой
равно выражению, стоящему в правой части
равенства (53).
,Z-изображение которой
равно выражению, стоящему в правой части
равенства (53).
Для
рассматриваемого примера
![]() .
.
Такой решетчатой
функции соответствует сколь угодно
много непрерывных функций
![]() ,
совпадающих с
,
совпадающих с![]() в моменты квантования. Поэтому переход
к
в моменты квантования. Поэтому переход
к![]() осуществим, формально воспользовавшись
равенством
осуществим, формально воспользовавшись
равенством![]() ,
откуда
,
откуда![]() ,
тогда:
,
тогда:
![]() .
.
Изображение
по Лапласу от
![]() :
:
![]()
Передаточная функция непрерывного корректирующего звена в соответствии с (54):
![]()