

2.4.3.1. Комплексный коэффициент передачи звена и его характеристики
![]() =
=![]() ,
,![]() . (2.42)
. (2.42)
Г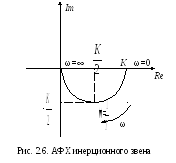 рафик
АФХ )см. рис. 2.6) представляет собой
полуокружность
рафик
АФХ )см. рис. 2.6) представляет собой
полуокружность![]() радиусомk/2, начинается
она (при ω = 0) в точке (k,0)
вещественной оси и при
радиусомk/2, начинается
она (при ω = 0) в точке (k,0)
вещественной оси и при![]() приходит в начало координат.
приходит в начало координат.
2.4.3.2. Логарифмические частотные характеристики (лах)
![]() ,
,
![]() ,
,
![]() (2.43)
(2.43)
Второе слагаемое в выражении (2.43) (т.е.
![]() приk= 1) имеет хорошее
приближение в виде линейно – ломанной
кривой, асимптотически приближающуюся
к истинной кривой на малых и больших
частотах.
приk= 1) имеет хорошее
приближение в виде линейно – ломанной
кривой, асимптотически приближающуюся
к истинной кривой на малых и больших
частотах.
Таким образом, асимптотические
логарифмические характеристики
идеального инерционного звена
представляются выражениями (учитывая
единичный коэффициент усиления![]() и постоянную времениT):
и постоянную времениT):
L()
= 20lg(A())=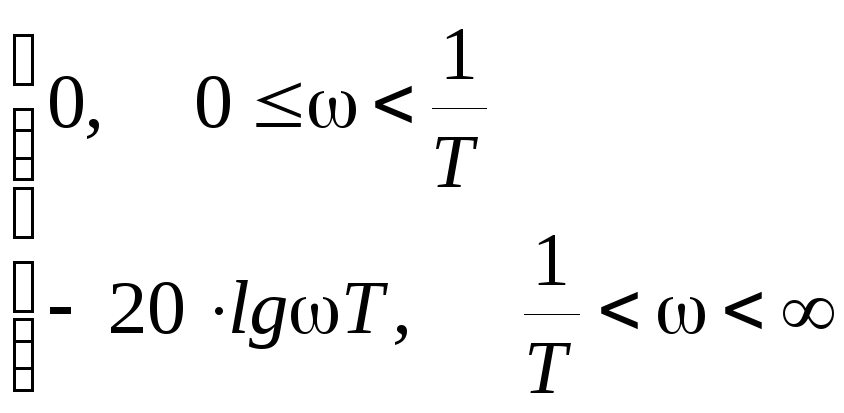
![]() ,
()
= – arctgT. (2.44)
,
()
= – arctgT. (2.44)
График асимптотической амплитудно-частотной характеристики L = L()идеального инерционного звена представляет
собой ломаную линию, совпадающую с
осью в
диапазоне изменения частот от нуля до
частоты сопряжения con
=
![]() и прямую, имеющую наклон – 20 дБ/дек, для
частот, больших частоты сопряжения(рис.2.7).
и прямую, имеющую наклон – 20 дБ/дек, для
частот, больших частоты сопряжения(рис.2.7).

Рис. 2.7 ЛАХ инерционного звена
График функции L = L()
при![]() должен быть поднят на величину 20lg(k),
если она положительная, и опущен, если
она отрицательная (приk<1).
должен быть поднят на величину 20lg(k),
если она положительная, и опущен, если
она отрицательная (приk<1).
График фазо-частотной характеристики инерционного звена строится в соответствии с данными табл.1.
() = -–arctgT. Таблица 1
|
|
0 |
|
0,2/T |
0,5/T |
1/T |
2/T |
5/T |
10/T |
|
|
() |
0 |
–6 |
–11 |
–26 |
–45 |
–90 +26 |
–90 +11 |
–90 +6 |
–90 |
2.4.3.3. Временные характеристики инерционного звена
В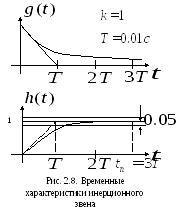 простейших случаях инерционное звено
может служить моделью некоторой системы
автоматического управления первого
порядка. Графическое изображение
временных характеристик позволяет
оценить характер динамики такой системы.
Функции
простейших случаях инерционное звено
может служить моделью некоторой системы
автоматического управления первого
порядка. Графическое изображение
временных характеристик позволяет
оценить характер динамики такой системы.
Функции![]() ,
определяющие эти характеристики, будут
получены с применением таблиц
преобразования Лапласа, приведенных в
приложении 1.
,
определяющие эти характеристики, будут
получены с применением таблиц
преобразования Лапласа, приведенных в
приложении 1.
a).Импульсная
переходная характеристика![]() .
.
Изображение её согласно формуле (2.35) имеет вид
![]()
![]() (2.45)
(2.45)
b). Переходная
характеристика![]() .
.
Изображение её согласно формуле (2.36)
![]()
![]() . (2.46)
. (2.46)
На рис. 2.8 представлены графики этих характеристик.
2.4.4. Форсирующее звено
2.4.4.1. Передаточная функция форсирующего звена
![]() . (2.45)
. (2.45)
k– безразмерный коэффициент усиления,
T– постоянная времени звена, [T] = с.
Значения этих параметров для форсирующего звена не зависят друг от друга. Для идеального форсирующего звена коэффициент усиленияk = 1.
2.4.4.2. Комплексный коэффициент передачи звена и его характеристики
![]() ,
,![]() ,
,![]()
![]() . (2.46)
. (2.46)
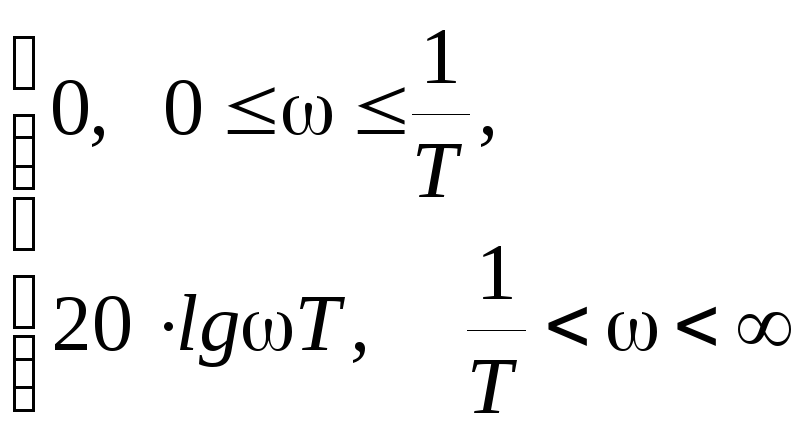
Второе слагаемое выражения (16) или L(ω) приk= 1 аппроксимируется линейно - ломаной
L() = 20lgωT
=  ,()
= +arctgT. (2.47)
,()
= +arctgT. (2.47)
Таким образом, график L = L()
идеального форсирующего звена совпадает
с осью
на частотах, меньших частоты
сопряжения < ![]() ,
а на частотах больших частоты сопряжения >
,
а на частотах больших частоты сопряжения > ![]() является прямой с наклоном +20 дБ/дек(увеличение L() на
20 дБ при увеличении частотыв 10
раз).
является прямой с наклоном +20 дБ/дек(увеличение L() на
20 дБ при увеличении частотыв 10
раз).
Фазовая характеристика форсирующего звена соответствует табл. 4.
() = +arctgT. Таблица 4
|
|
0 |
|
0,2/T |
0,5/T |
1/T |
2/T |
5/T |
10/T |
|
|
() |
0 |
6 |
11 |
26 |
45 |
90 –26 |
90 –11 |
90 –6 |
90 |

Рис. 2.9. ЛАХ идеального форсирующего звена