

2.8.2. Ошибки, вызванные помехойf(t)
Случайная составляющая сл(t) ошибки системы в данном случае вызывается действием помехиf(t). Рассматриваемая система является линейной и стационарной. Помехаf(t). – стационарный случайный процесс с нулевым математическим ожиданием и спектральной плотностьюSf(). В этих условиях случайная составляющая ошибкисл(t) также представляет собой стационарный случайный процесс с нулевым математическим ожиданием и спектральной плотностью
S() = Sf()Kf(j)2, Kf(j) = Wf(s)s=j . (2.93)
Ее дисперсия определяется выражением
2=![]() (2.94)
(2.94)
или, учитывая, что в рассматриваемом задании помеха представляется как белый шум и имеет постоянную спектральную плотность мощности Sf()Sf(0) =const,
2 =![]() . (2.95)
. (2.95)
Формулы для вычисления интегралов вида:
Jn=![]() (2.96)
(2.96)
приведены в [ 3 ] на стр. 321 – 322 (n– порядок системы).
Следует обратить внимание на совмещение обозначений: C(s) – знаменатель передаточной функцииW(s) (см. (4.4)), аС(j) - числитель комплексного коэффициента передачиKf(j) в формуле (4.13). Кроме этого, в этих формулах изменен порядок индексации коэффициентовci:i= 0, 1, 2,…,n– 1 иdj: j= 0, 1, 2, …,n, т.е.
![]() (2.97)
(2.97)
Для исходной системы третьего порядка, т.е. при n= 3, интегралJ3имеет вид
J3 =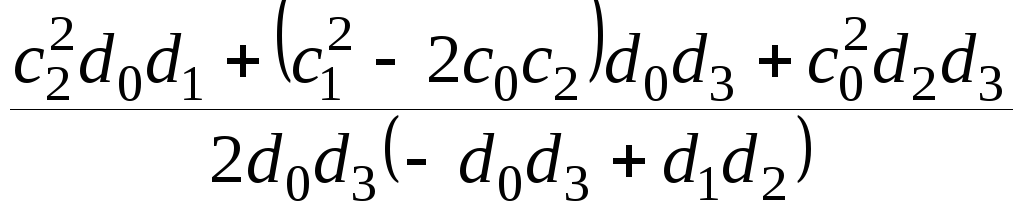 . (2.98)
. (2.98)
Для результирующей системы четвертого порядка, т.е. при n= 4, формула для интегралаJ4имеет вид
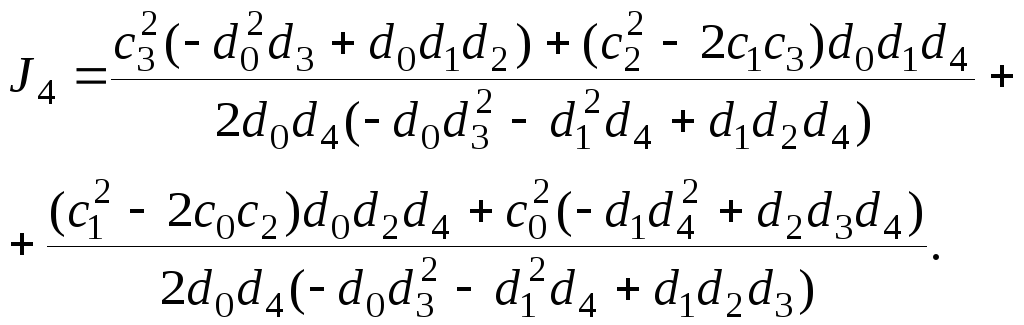 (2.99)
(2.99)
Удобно дисперсию ошибки представлять в виде
![]() , (2.100)
, (2.100)
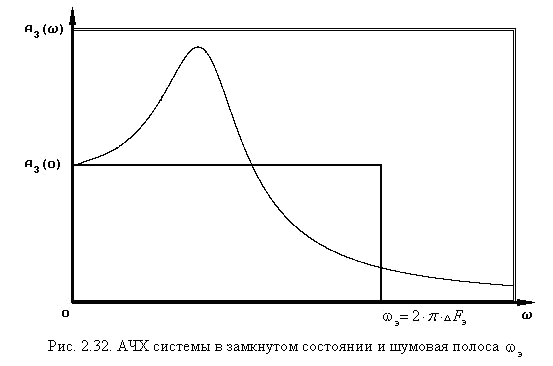
где Fэ=![]() - эквивалентная шумовая полоса
рассматриваемой системы, равная полосе
пропускания некоторой эквивалентной
системы, имеющей прямоугольную
амплитудно-частотную характеристику
(АЧХ) замкнутой системы с тем же
коэффициентом передачи на нулевой
частоте, что и в рассматриваемой системе
(см. рис. 10).
- эквивалентная шумовая полоса
рассматриваемой системы, равная полосе
пропускания некоторой эквивалентной
системы, имеющей прямоугольную
амплитудно-частотную характеристику
(АЧХ) замкнутой системы с тем же
коэффициентом передачи на нулевой
частоте, что и в рассматриваемой системе
(см. рис. 10).
Таким образом,
![]() . (2.101)
. (2.101)
Именно значение Fэхарактеризует помехоустойчивость системы.Чем шире полоса Fэ, тем меньше помехоустойчивость системы.
2.9. Техническое задание, запретные зоны
2.9.1. Техническое задание на проектирование системы
При проектировании системы должны быть выполнены следующие требования:
Результирующая система должна быть устойчивой. Запасы устойчивости по амплитуде и фазе: L14 дБ,30.
Ограничивается колебательность системы:
 .
.Для достижения требуемой точности по регулярному задающему воздействию в установившемся режиме работы системы должны выполняться условия:
а)![]() A0,
A0,![]() B0– для статических
систем;
B0– для статических
систем;
b)![]() A1,
A1,![]() B1– для
астатических систем первого порядка;
B1– для
астатических систем первого порядка;
c)![]() A2– для астатических систем второго
порядка;
A2– для астатических систем второго
порядка;
уст– ошибка в установившемся режиме,
![]() –
максимальные значения задающего
воздействия, его скорости и ускорения,
–
максимальные значения задающего
воздействия, его скорости и ускорения,
А0,А1,А2,В0,В1– заданные постоянные.
Из всех рассматриваемых в процессе проектирования вариантов системы выбрать вариант, обеспечивающий системе наибольшее быстродействие.
2.9.2. Построение запретных зон по колебательности
Запретные зоны по колебательности
строятся на ряде характеристик и
представляют собой области, в которых
выполняется условие
![]() .
(В предлагаемом заданииМд=
1,5).
.
(В предлагаемом заданииМд=
1,5).
1. На амплитудно – частотной характеристике
системы в замкнутом состоянии (см. рис.
) - это область, расположенная выше
прямой
![]() ,
в которую не должно попадать максимальное
значение функции
,
в которую не должно попадать максимальное
значение функции
![]()
![]() .
.
2. На амплитудно – фазовой характеристике системы в разомкнутом состоянии (АФХ) запретная зона – внутренние точки области, ограниченной окружностью, являющуюся линией постоянного уровняМд= 1,5 (см. рис. 9).
3. Наибольшее значение для коррекции системы имеет построение запретной зоны по колебательности на логарифмических частотных характеристиках (ЛАХ) системы (см. рис. 4).
Для построения запретной зоны на ЛАХ системы необходимо:
На графике логарифмической амплитудно – частотной характеристики L= L() изображаются две линии, параллельные оси ω, имеющих уровни 20lg(
 ),
20lg(
),
20lg( ).
Фиксируются значения частот ωaи ωb,
точек пересечения
этими линиями характеристикиL= L(). На
графике фазочастотной характеристики
на уровнеϕ(ω)
= –π для приведенных значений частот
ставятся точкиAиB. Из точки,
находящейся на средине отрезкаAB
вверх откладывается значение угла
∆γ =arcsin(1/Mд).
Через точкиA, Bи новую точкуC
проводится дуга. Область, заключенная
между этой дугой и линиейϕ(ω)
= –π является запретной зоной по
колебательности. Если логарифмическая
фазочастотная характеристика не
пересекает эту зону, то выполняется
условие
).
Фиксируются значения частот ωaи ωb,
точек пересечения
этими линиями характеристикиL= L(). На
графике фазочастотной характеристики
на уровнеϕ(ω)
= –π для приведенных значений частот
ставятся точкиAиB. Из точки,
находящейся на средине отрезкаAB
вверх откладывается значение угла
∆γ =arcsin(1/Mд).
Через точкиA, Bи новую точкуC
проводится дуга. Область, заключенная
между этой дугой и линиейϕ(ω)
= –π является запретной зоной по
колебательности. Если логарифмическая
фазочастотная характеристика не
пересекает эту зону, то выполняется
условие .
.Если указанное условие не выполняется, то необходимо обеспечить, чтобы наклон линейно – ломаной L= L() между частотами ωaи ωb был равным –20 дБ/дек.