

2.10.2.3. Регулярные ошибки в установившемся режиме
Раскрыв скобки в формуле (6.3) и произведя необходимые преобразования, получим
![]() . (2.108)
. (2.108)
Тогда в соответствии с формулой (4.5) передаточная функция ошибки будет иметь вид
 . (2.109)
. (2.109)
Для рассматриваемого примера полиномы в (6.7) и (6.8) имеют вид:
 (2.110)
(2.110)
В соответствии с выражением (4.10) для вычисления коэффициентов ошибок формируется соотношение
![]() (2.111)
(2.111)
Перемножив полиномы левой части и приравняв коэффициенты при одинаковых степенях s, получим
![]()
![]() (2.112)
(2.112)
![]()
![]()
Таким образом,
![]()
Полученные коэффициенты ошибок позволяют определить значения регулярной составляющей ошибки в установившемся режиме работы системы для трех заданных входных воздействий.
а)![]() уст= 0.
уст= 0.
b)![]() уст= 0,5 10-3v.
уст= 0,5 10-3v.![]()
![]()
c)![]() ,уст= 0.35 10-6w,
,уст= 0.35 10-6w,![]()
Из полученных результатов можно сделать заключение, что требования точности системы по скорости входного воздействия не выполняется, а по ускорению – выполняется.
2.10.2.4. Случайные ошибки в установившемся режиме
Влияние случайной составляющей ошибки на работу системы характеризуются дисперсией ошибки σ (4.13) и величиной шумовой полосы∆Fэ (4.18). Для вычисления этих параметров требуется вычислить интеграл (4.16). В соответствии с выражениями (4.6) и (4.11) комплексный коэффициент передачи случайной ошибки в обозначениях формул (6.9) равен
![]() . (2.113)
. (2.113)
В обозначениях интеграла (6.12)
![]() .
.
Таким образом, с учетом (4.15) имеем
![]() =
– 2,
=
– 2,
![]() 2000.
2000.
![]()
![]() ,
,
![]() ,
,
![]() .
.
Подставляя полученные значения в формулу (6.12) вычисляется интеграл J3и в соответствии с формулами (4.17) и (4.18) – значения параметров2,∆Fэ.
J3= 724,∆Fэ= 362 Гц,2= 724Sf(0).
2.10.2. Применение последовательного корректирующего фильтра
Итак, исходная система устойчива, но не удовлетворяет требованиям технического задания по точности и запасам устойчивости. Как отмечалось в разделе 6.1 для удовлетворения требованиям точности необходимо увеличить коэффициент усиления kтак, чтобы логарифмическая амплитудно – частотная характеристика проходила выше запретной зоны по точности.
![]() , (2.114)
, (2.114)
где
kрез– коэффициент усиления результирующей системы,
kис– коэффициент усиления исходной системы,
kкор – коэффициент усиления корректирующего фильтра.
Для рассматриваемого примера минимальное значение коэффициента усиления равно kкор= 2 (в этом случае ломанаяL=L(ω) «лежит» на границе запретной зоны).
Ниже будут рассмотрены два варианта коррекции исходной системы
На рис. 16 представлены графики ЛАХ для варианта с применением фильтра с опережением по фазе с параметрами
![]() =
0,002c,
=
0,002c,![]() = 0,0001c.
= 0,0001c.
На рис. 2.38 изображены графики ЛАХ для варианта с применением фильтра с запаздыванием по фазе с параметрами
![]() =
0,02c,
=
0,02c,![]() = 0,5c.
= 0,5c.
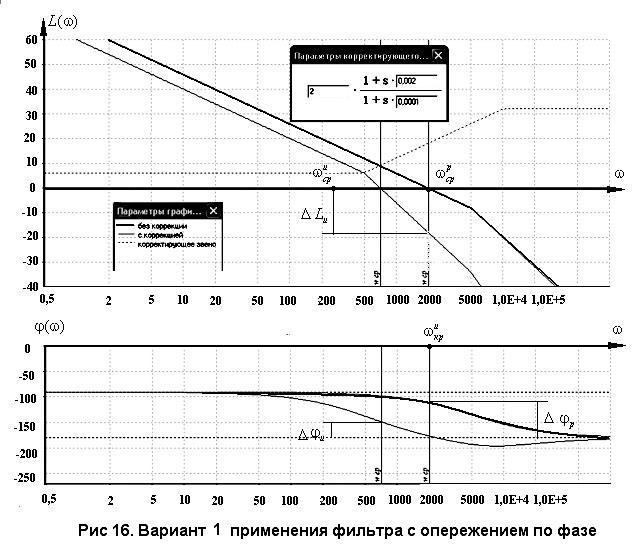
Рис. 2.38. Вариант 1 применения фильтра с опережением по фазе
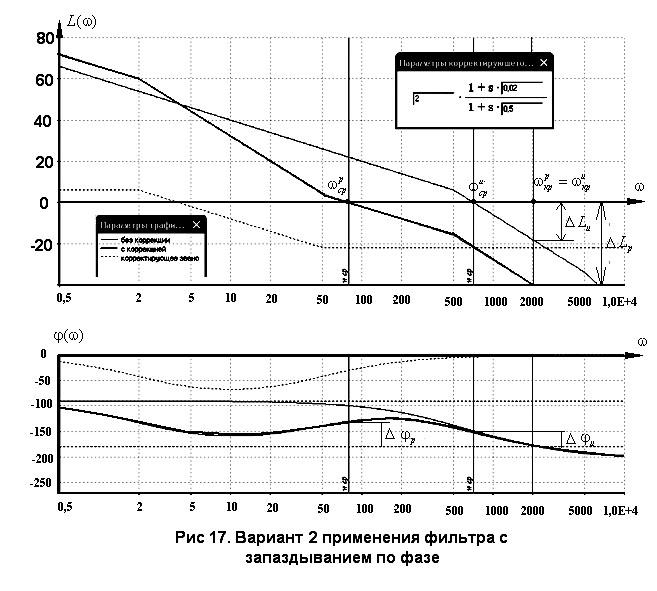
Рис. 2.39. Вариант 2 применения фильтра с запаздыванием по фазе.
Графики ЛАХ подобные тем, что изображены
на рис.2.38 и рис. 2.39, входят в состав
индивидуального домашнего задания,
выполняемого студентом до
соответствующей лабораторной работы.
В процессе выполнения указанной
лабораторной работы с применением
программных продуктовPTSystem
и PTSystem_New
появляется возможность на экране
дисплея иметь графики АФХ,
![]() и переходной характеристики,
рассчитанные значения показателей
точности системы. Это позволяетуточнитьпредложенные варианты ивыбрать из
них наилучшиес той или иной точки
зрения. Графики переходных характеристик
и АЧХ системы в замкнутом состоянии для
рассматриваемых вариантов результирующих
систем представлены на рис. 2.40 – рис.2.43.
и переходной характеристики,
рассчитанные значения показателей
точности системы. Это позволяетуточнитьпредложенные варианты ивыбрать из
них наилучшиес той или иной точки
зрения. Графики переходных характеристик
и АЧХ системы в замкнутом состоянии для
рассматриваемых вариантов результирующих
систем представлены на рис. 2.40 – рис.2.43.
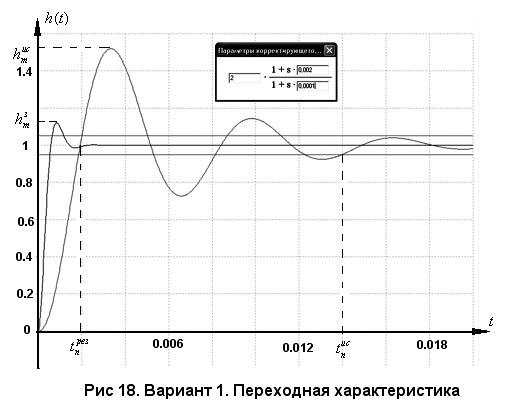
Рис. 2.40. Вариант 1. Переходная характеристика.

Рис. 2.41. Вариант 1. АЧХ
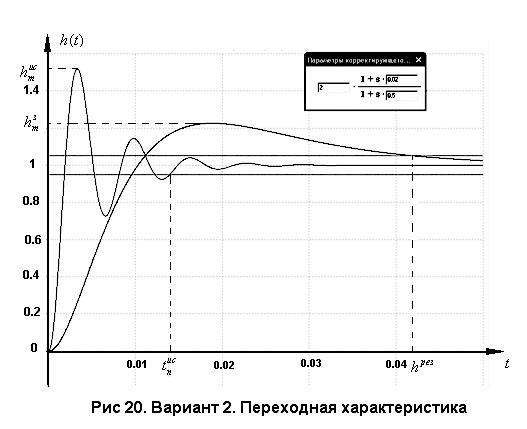
Рис. 2.42. Вариант 2. Переходная характеристика
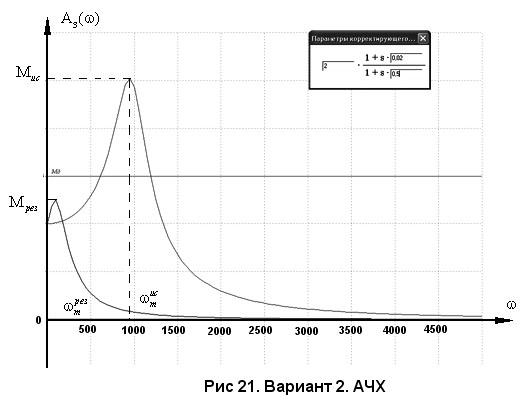
Рис. 2.43. Вариант 2. АЧХ
В таблице 7 приведены значения показателей качества исходной и двух вариантов результирующих систем. Параметры ωср, ωкр, ∆L, ∆ϕ,M получены на основе анализа частотных характеристик. Показатели точности γ1, γ2, ∆F – рассчитаны по формулам, перерегулирование σ и время переходного процессаtпполучены с использованием программного обеспечения, разработанного на кафедре. Для сравнения в первой строке рассматриваемой таблицы приведены данные технического задания.
Таблица 7
|
|
ωср 1/c |
ωкр 1/c |
∆LдБ |
∆ϕ гр. |
M |
(γ1) |
(γ2) |
∆F Гц |
σ% |
tп с |
|
Техническ. Задание |
|
|
14 |
30 |
1,5 |
2 10-4 |
2 10-4 |
|
30% |
|
|
Исходная система |
1000
|
2000
|
14 |
20 |
2,5 |
5 10-4
|
3,5 10-7 |
362 |
52,7% |
1,410-3 |
|
Система варианта 1
|
5000
|
|
|
45 |
1,1 |
2,510-4
|
–1,210-8
|
|
11,6% |
1,310-2 |
|
Система варианта 2
|
200 |
2000 |
34 |
50 |
1,25 |
2,510-4
|
1,210-8
|
|
22,6% |
4,210-2 |