

2.5.2. Система с единичной отрицательной обратной связью
Важнейшим частным случаем встречно - параллельного соединения элементов является соединение с единичной отрицательной обратной связьюWос(s) = 1. Такое соединение применяется при формировании замкнутой системы автоматического управления (рис 2.16). В этой системе:
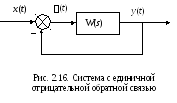
W(s) – передаточная функция системы в разомкнутом состоянии (в случае разрыва обратной связи(t) =x(t) и передаточная функция
 );
);Wз(s) – передаточная функция системы в замкнутом состоянии
 ;
;x(t) – основное или задающее входное воздействие;
y(t) – выходная величина;
(t) =x(t) -y(t) – ошибка системы.
Согласно выражению (2.60) в рассматриваемом случае формула для вычисления передаточной функции системы в замкнутом состоянии имеет вид
![]() . (2.61)
. (2.61)
Пусть
![]() (см. (2.16)) тогда в соответствии с формулой
(2.60)
(см. (2.16)) тогда в соответствии с формулой
(2.60)
![]() (2.62)
(2.62)
где A(s) =B(s) +C(s) – характеристический полином системы в замкнутом состоянии.
2.5.3. Системы с двумя входными воздействиями
Описание системы с двумя входными воздействиями
с использованием аппарата передаточных функций будет продемонстрировано на примере системы, структурная схема которой приведена на рис. 2.17.
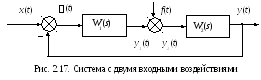
В этой системе
x(t) – основное или задающее входное воздействие;
f(t) – суммарная помеха, приведенная к выходу дискриминатора;
y(t) – выходная величина;
(t) =x(t) -y(t) – ошибка системы;
W1(s) иW2(s) – заданные передаточные функции.
Пусть заданы система и оба входных воздействия. Чтобы описать свойства динамики системы требуется знать закон изменения выходной величины y = y(t) (илиY=Y(s)). Точность системы определяется ошибкой(t) (или её изображениемE(s)). Обе эти величины зависят от обоих входных воздействий. Для линейных непрерывных систем, учитывая принцип суперпозиции, указанная зависимость имеет вид
![]() ,
,
![]() ; (2.63)
; (2.63)
![]() ,
,
![]() ;
;
![]() ,
,
![]() . (2.64)
. (2.64)
Требуется определить передаточные функции (2.64), являющиеся коэффициентами приведенной зависимости (2.63). Для этого воспользуемся методом стандартных соединений.
a).![]() = ?
= ?
При отсутствии помехи f(t)
структурная схема рассматриваемой
системы совпадает со схемой рис. 2.15 при
условии, что
![]() .
Таким образом, в соответствии с формулой
(2.61) получим
.
Таким образом, в соответствии с формулой
(2.61) получим
![]() =
=![]() .
.
b).
![]() = ?
= ?
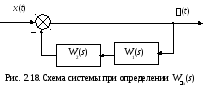
Отсутствует помеха f(t), выходная величина(t). Схему системы удобно представить в виде, изображенном на рис. 2.18. В соответствии со схемой передаточная функция системы в разомкнутом состоянии
W(s)
= 1, передаточная функция цепи обратной
связи
![]() .
.
Таким образом,
![]() .
.
c).
![]() =
?
=
?
В рассматриваемом случае структурная схема, изображенная на рис. 2.17, может быть преобразована и имеет вид стандартного встречно – параллельного соединения (см. рис. 2.19). При этом был применен приём, позволяющий переносить знак «-» через линейное звено.

Следовательно,
![]() =
=![]() .
.
d).
![]() = ?
= ?
При x(t) = 0 – ошибка системы(t) = –y(t) и
![]() =
=
![]() =
=![]() .
.
2.6 Устойчивость линейных непрерывных систем
2.6.1. Определение устойчивости
Устойчивость – это важнейшее свойство системы автоматического управления. Если система не является устойчивой, то она неработоспособная.
Пусть система находится в состоянии равновесия и, начиная с некоторого момента времени, на нее начинают действовать ограниченные воздействия – возмущения. Если система под действием ограниченных возмущений имеет способность мало отклоняться от состояния равновесия, то она устойчива.В противном случае достаточно действия небольшого возмущения чтобы далеко отклонилась от состояния равновесия.
Возмущения могут быть непрерывными или импульсными, действующие на систему, в какие – то моменты времени. Доказывается что, если система устойчива при действии на неёначального мгновенного возмущения, то она будет устойчивой и при действии других видовограниченных возмущений. Математически начальное мгновенное возмущение описывается дельта – функцией(t). Таким образом, судить об устойчивости системы можно по виду ее импульсной переходной характеристики. Как отмечалось в разделе 2.1 (см.(2.27), (2.28)), действие идеального импульса на линейную систему приводит к мгновенному изменению начальных условий (выводу её из состояния равновесия). Если в дальнейшем, будучи предоставлена самой себе, система сможет вернуться в состояние равновесия, то она устойчива.
Итак, если функция g(t) и её производные до (n-1) – го порядка ограничены, то система устойчива. Если, кроме того, пределы этих функций с течением времени стремятся к нулю, то система устойчива асимптотически.