

Учебник
.pdf9. Преобразования систем координат
Аналогичная ситуация возникает и при описании точек в разных системах отсчета. На рис. 9.2 приведен пример точки M и трех систем отсчета, повернутых и сдвинутых относительно друг друга. Мы видим, что в системе отсчета K у точки M обе координаты не равны нулю. В системе отсчета K′ абсцисса точки M равна нулю xM′ = 0, а в системе отсчета K′′ уже обе координаты равны нулю. При этом точка M осталась геометрически на прежнем месте. Следовательно, между координатами точки в различных системах отсчета, как и у координат вектора, должна быть определенная связь, которая должна определяться тем, как связаны между собой системы координат.
9.2. Связь между координатами точки в различных системах координат
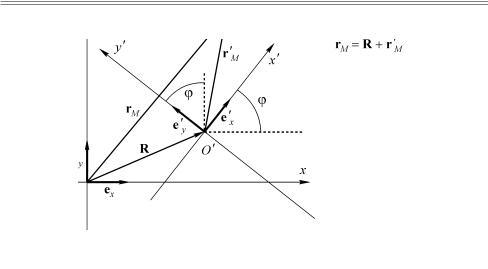
Предположим, что нам задана точка |
M (x, y) своими коор- |
||
динатами в системе отсчета K. А также задана вторая система |
|||
координат K′ — новая система отсчета, которая получена из |
|||
старой системы |
отсчета K |
после параллельного переноса на |
|
заданный вектор |
R = ( X0 ,Y0 ) |
и поворота на заданный угол ϕ |
|
(ñì. ðèñ. 9.3.): |
|
|
|
Вектор R связывает между собой радиус-векторы точки M |
|||
в новой и в старой системах отсчета |
|
||
|
rM = R +rM′ . |
(9.1) |
|
Это соотношение поможет нам найти связь и между координатами.
Представим векторы rM è R в виде их разложений по ортам системы K :
rM = xex + yey è R = X0ex +Y0ey ,
а вектор rM′ разложим по базису новой системы отсчета K ′:
rM′ = x′e′x + y′e′y .
143
I. Векторная алгебра
Ðèñ. 9.3. Связь между радиус-векторами точки в различных системах отсчета
Здесь коэффициенты x′ è y′ — не что иное, как координаты точки M в системе отсчета K ′, то есть искомые новые координаты. Теперь подставим эти разложения в соотношение (9.1):
xex + yey = X0ex +Y0ey + x′e′x + y′e′y . |
(9.2) |
Дальше можно рассуждать двумя способами, которые, естественно, приводят к одному результату.
Способ 1
Умножим соотношение (9.2) поочередно на векторы ex è ey , и воспользуемся соотношениями, справедливыми для ортов в ортонормированных базисах: exex = eyey =1 è exey = eyex = 0. Тогда из (9.2) получим два соотношения для координат:
x = X0 + x′(exe′x ) + y′(exe′y ) ,
y =Y0 + x′(eye′x ) + y′(eye′y ) .
144

9. Преобразования систем координат
Скалярные произведения ортов в этих соотношениях равны косинусам углов между векторами, так как длины ортов равны единице. Например, exe′x = cos( exe′x ). Углы же между ортами можно вязать с заданным углом поворота ϕ. Так, например, угол между первыми базисными векторами просто равен ϕ. Таким образом, для скалярных произведений ортов старого и нового базисов получаем следующие соотношения:
exe′x = cosϕ , exe′y = cos π2 +ϕ = −sinϕ ,
π |
|
= sinϕ , |
eye′y = cosϕ , |
(9.3) |
|
eye′x = cos |
2 |
−ϕ |
|||
|
|
|
|
|
|
с помощью которых получаем окончательные выражения для связи координат:
x = X0 |
+ x′cosϕ − y′sinϕ |
. |
(9.4) |
|
+ x′sinϕ + y′cosϕ |
||
y =Y0 |
|
|
Полученное выражение называется законом преобразования
координат. |
|
|
|
|
|
|
|
|
Способ 2 |
|
|
|
|
|
|
|
|
В выражение (9.2) входят векторы e′x |
è e′y , |
заданные в двумер- |
||||||
ном пространстве с базисом |
(ex ,ey ). Следовательно, их можно |
|||||||
представить в виде разложения по этому базису: |
||||||||
e′ =α |
|
e |
|
+α |
|
e |
y , |
(9.5) |
x |
xx |
|
x |
|
xy |
|
||
e′y =α yxex +α yyey |
|
|||||||
где коэффициенты αij являются координатами ортов нового базиса в старом базисе. Эти же выражения (9.5) можно трактовать как закон преобразования базисных векторов.
Коэффициенты αij находим так же, как и координаты любого вектора в базисе — путем скалярного произведения этого вектора на соответствующий орт:
αij = e′ie j .
Такие скалярные произведения мы только что вычислили в (9.3) и поэтому для новых ортов получаем:
145

I. Векторная алгебра
e′ |
= e |
|
cosϕ +e |
|
sinϕ |
. |
(9.6) |
x |
|
x |
|
y |
|
||
e′y |
= −ex sinϕ +ey cosϕ |
|
|
||||
Теперь нам осталось подставить эти выражения в (9.2):
xex + yey = X0ex +Y0ey + x′(ex cosϕ +ey sinϕ )+ y′(−ex sinϕ +ey cosϕ )
и приравнять между собой коэффициенты перед ортами ex è ey в правой и левой части этого равенства. В итоге получим соотношения
x = X0 + x′cosϕ − y′sinϕ ,
y =Y0 + x′sinϕ + y′cosϕ
которые совпадают с результатом (9.4).
Оба вышеприведенных вывода могут рассматриваться как доказательство теоремы о линейности преобразований координат при параллельных переносах и поворотах систем координат.
Теорема о линейности преобразований координат
При переходе от одной декартовой системы координат к другой путем параллельного переноса и поворота, координаты выражаются друг через друга линейным образом.
Только что мы получили так называемые формулы перехода от одной декартовой системы отсчета к другой при параллельном переносе начал отсчета на вектор ( X0 ,Y0 ) и поворота на угол ϕ :
x = X0 |
+ x′cosϕ − y′sinϕ |
. |
(9.4) |
|
+ x′sinϕ + y′cosϕ |
||
y =Y0 |
|
|
Несмотря на то, что эти соотношения не дают явных выражений для новых координат, они описывают так называемый
переход от старых координат к новым. Дело в том, что они позволяют любую функцию старых координат, заданную в старой системе отсчета, выразить через новые координаты, например:
f (x, y) = f (x(x′, y′), y(x′, y′)) ≡ f ′(x′, y′).
Для того чтобы выразить новые координаты через старые, нужно провести так называемое обратное преобразование ко-
146

9. Преобразования систем координат
ординат. С этой целью можно умножить основное равенство (9.2) поочередно на орты нового базиса и получить явные выражения для новых координат x′ = x′(x, y) è y′ = y′(x, y).
Однако, такую связь можно получить и из соотношений (9.4), если рассмотреть их как систему уравнений относительно двух переменных x′ è y′. Решение такой системы дает закон обратного преобразования координат:
|
x′ = (x − X0 ) cosϕ +(y −Y0 ) sinϕ |
|
|
|
|
. |
(9.7) |
||
|
|
0 ) sinϕ +(y −Y0 ) cosϕ |
||
y′ = −(x − X |
|
|
||
|
|
|
|
|
Интересным является тот факт, что в случае поворота соотношения (9.7) можно получить из (9.4) без вычислений, если учесть, что обратное преобразование можно трактовать как поворот в противоположную сторону, то есть просто заменить ϕ → −ϕ.
9.3. Преобразования координат в пространстве
Теперь рассмотрим преобразование координат точки в трехмерном пространстве. Предположим, что в старой системе от- счета K задан радиус-вектор R = ( X1 , X2 , X3 ) начала отсчета и базисные векторы (e1′,e′2 ,e′2 ) новой системы координат K ′:
3 |
|
e′i = ∑αik ek . |
(9.8) |
k =1
Эти выражения с одной стороны можно трактовать как разложение новых базисных векторов по старому базису, а с другой стороны, как закон преобразования базиса при вращениях в трехмерном пространстве.
Радиус-вектор rM заданной точки M , как и в двумерной задаче, можно представить в следующем виде: rM = R +rM′ , ãäå rM′ — это радиус-вектор точки M в новой системе отсчета, и поэтому его координаты являются новыми координатами точки M .
Умножая это соотношение поочередно на базисные векторы старого базиса ek , получим искомые выражения старых координат через новые:
147

I. Векторная алгебра
′ |
Xk |
|
3 |
′ ′ |
|
3 |
′ |
3 |
xk ≡ rM ek = (R +rM )ek = |
+ |
∑xiei |
ek = Xk + ∑xi |
∑αije jek = |
||||
|
|
i=1 |
|
|
m=1 |
|
j=1 |
|
3 |
3 |
|
|
|
|
3 |
|
|
= Xk + ∑∑xi′αijδ jk =Xk + ∑xi′αik . |
|
|
||||||
i=1 |
j=1 |
|
|
|
|
m=1 |
|
|
Мы получили аналогичное (9.4) выражение для преобразования координат в трехмерном пространстве:
3 |
|
xk = Xk + ∑xi′αik , |
(9.9) |
i=1 |
|
ãäå αik = eiek ≡ cos( eiek ) — косинусы углов |
между соответ- |
ствующими ортами. |
|
Полученное соотношение имеет одно существенное (и очень важное) отличие от формулы преобразования ортов. В формуле преобразования ортов суммирование ведется по второму индексу коэффициентов αik , а в формуле преобразований координат — по первому. Такое отличие особенно будет важным в будущем при изучении неэвклидовых пространств.
Âнашем случае это отличие приводит к тому, что в формулах прямого преобразования (9.4) знак «минус» стоит в первом уравнении, а в формулах для обратного преобразования (9.7) знак минус стоит во втором уравнении.
Âдвумерном случае нам удалось углы между всеми ортами выразить через угол поворота (9.3). В трехмерном случае возможны различные способы описания поворотов систем отсчета, с которыми можно познакомиться в различных учебниках по геометрии или физике.
9.4.Преобразования векторов.
Новое определение вектора
Теперь рассмотрим преобразования координат векторов при поворотах системы отсчета, или, другими словами, при переходе от одного базиса к другому.
148

9. Преобразования систем координат
Предположим, что задан |
вектор |
a |
своими координатами |
|||||
1 2 |
( 1 |
2 ) |
À |
также |
|
даны базисные векторы |
||
a = (a , a ) в базисе |
e ,e |
. |
|
|||||
нового базиса: |
|
|
|
|
|
|
|
|
|
e′ =α e +α |
12 |
e |
2 . |
||||
|
|
1 |
11 |
1 |
|
|||
|
e′2 =α 21e1 +α 22e2 |
|
||||||
Тогда можно совершить переход к новому базису:
a = a1e1 + a2e2 ≡ a1′e1′ + a2′e′2 = a1′(α11e1 +α12e2 )+ a2′(α 21e1 +α 22e2 ). (9.10)
Раскрывая скобки и сравнивая коэффициенты, перед соответствующими ортами, получаем следующие формулы для преобразования координат векторов:
a =α a′ |
+α a′ |
(9.11) |
1 11 1 |
21 2 . |
|
a2 =α12a1′+α 22a2′ |
|
|
Мы видим, что координаты вектора меняются по тому же закону, что и координаты точки при поворотах. В этом нет ниче- го удивительного, так как координаты точки, по сути, являются координатами радиус-вектора этой точки, и мы могли получить формулы (9.11) прямо из соотношений (9.9). Таким образом, в случае поворотов координаты вектора преобразуются по следующему закону:
a = a′cosϕ −a′sinϕ |
. |
(9.12) |
||
1 |
1 |
2 |
||
a2 |
= a1′sinϕ + a2′ cosϕ |
|
|
|
Давайте найдем квадрат длины вектора в старом и в новом базисе:
a2 = a12 + a22 = (a1′cosϕ − a2′sinϕ )2 + (a1′sinϕ + a2′ cosϕ )2 ≡ (a1′)2 +(a2′)2 .
Мы видим, что длина вектора не изменяется при переходе от одного базиса к другому, и, кроме того, выражается одинаковым образом через координаты в различных базисах. Такие величины называются инвариантами èëè скалярами.
149

I. Векторная алгебра
Другим примером скалярной величины является скалярное произведение. Вычислим скалярное произведение двух векторов в разных базисах:
ab = a1 b1 + a2b2 = (a1′cosϕ − a2′ sinϕ )(b1′cosϕ −b2′sinϕ ) +
+(a1′sinϕ + a2′ cosϕ )(b1′sinϕ +b2′cosϕ ) = a1′ b1′ + a2′ b2′ .
Тот факт, что результатом скалярного произведения векторов является скалярная величина, и послужил причиной, по которой это произведение назвали скалярным произведением.
В трехмерном пространстве формулы преобразования координат векторов тоже совпадают с формулами (9.11) преобразования координат вектора в плоскости:
ai = ∑α kiak′, |
(9.13) |
k |
|
где число αik является координатой орта нового базиса e′i , соответствующей орту старого базиса ek :
ei = ∑αike′k . k
В этих соотношениях намеренно не поставлены пределы суммирования по компонентам, потому что эти формулы справедливы в пространствах с любой размерностью. Именно изучение преобразования векторов позволяет нам обобщить понятие вектора для пространств любой размерности и на объекты любой математической или физической природы, которые уже трудно представить в виде направленных отрезков.
Напомним, что в начале нашего курса вместо «школьного» геометрического определения вектора как направленного отрезка, который определяет «направление и расстояние», было введено понятие вектора как класса эквивалентности равных направленных отрезков, которые изучает аналитическая геометрия. Теперь мы можем перейти к еще более абстрактному понятию
150

9. Преобразования систем координат
вектора, вообще не связанному с геометрическими понятиями. А именно, можно определить вектор как упорядоченный набор чисел в некотором базисе. Причем главным в этом определении будет то, что эти числа изменяются при переходе от одного базиса к другому по определенному закону (9.13):
ai = ∑α kiak′. k
Как мы уже неоднократно отмечали, координатами ai в обобщенном определении вектора может быть что угодно — абсцисса или ордината точек в декартовом пространстве, коэффициент в разложении решения дифференциального уравнения, например, уравнения теплопроводности, по простым решениям, количество химического реагента, амплитуда вероятности состояния в квантовой теории поля, соответствующая какой-то новой элементарной частице, относительное количество красного цвета
âсиреневом цвете, и даже время в теории относительности. Исследованию таких векторов и пространств, в которых за-
даны такие векторы, будут посвящены последующие разделы высшей математики и физики.
Там также будут встречаться некоторые сложные понятия и объекты, которые можно рассмотреть и с точки зрения обычных векторов в аналитической геометрии. Теперь, в качестве дополнительного материала, мы рассмотрим некоторые из таких понятий.
9.5.Преобразования координат при переходе
всистему отсчета с другой ориентацией. Собственные и несобственные преобразования
Как вы уже знаете, системы координат могут отличаться друг от друга не только поворотом и переносом начала координат, но и ориентацией. На рис. 9.4 а приведены примеры таких преобразований.
Простейшим примером перехода от системы отсчета с правым базисом к системе отсчета с левым базисом является смена
151
I. Векторная алгебра
направления одной из осей координат (см. рис. 9.4 б). Например, если новая система может отличаться от старой лишь переменой направлений оси ординат:
O → O′ = O
K → K′: ex →e′x = ex . (9.14)ey → e′y = −ey
à) |
á) |
Ðèñ. 9.4. Переход между системами с различной ориентацией
Такое преобразование системы координат похоже на отражение в зеркале, поэтому их так и называют зеркальными преобразованиями. Главная их особенность заключается в том, что их невозможно свести к какой-нибудь последовательности поворотов.
Нарисуйте на бумаге систему координат, и вы увидите, что повороты можно производить, не выводя лист бумаги из той плоскости, в которой он изначально находился. А для того, чтобы перевести нарисованную систему в систему с противоположной ориентацией, вам обязательно придется перевернуть лист вокруг какой-нибудь из прямых, лежащих на листе.
По этой причине нельзя пользоваться для этих преобразований формулами перехода (9.4) и (9.7), содержащими угол поворота. Однако те же соотношения можно записать в более общем виде, аналогичном (9.9):
152