

22 Энергетический баланс.
Уравнение энергетического баланса отражает распределение энергии двигателя на выполнение основного технологического процесса, совершение работы в разных механизмах трактора и взаимодействие движителей с дорогой. В общем случае мощностной баланс имеет вид
![]() (68)
(68)
где Ne — эффективная мощность
двигателя; NKp — тяговая мощность на
прицепном устройстве трактора; JVB0M
— мощность на валу отбора мощности;
Nr„, N&, Nj, N, — мощности, характеризующие
расход энергии на трение в трансмиссии,
буксование движителей, преодоление
сопротивлений качению и подъема; NK0U —
мощность, необходимая для создания
условий труда тракториста; Л^- — мощность
сил инерции; Np — мощность рассеивания,
поглощаемая устройством для снижения
колебании и другими упругими элементами
конструкции трактора; NH — недоиспользованная
мощность, возникающая вследствие того,
что двигатель не развивает полную
эффективную мощность, если момент
сопротивления носит переменный характер;
N„ — мощность, затрачиваемая на
буксование движителей и качение
трактора, возникающая вследствие
подворотов, осуществляемых на
гоне.Динамические
составляющие потерь и недоиспользования
мощности энергетического баланса
трактора
![]() будут
рассмотрены в третьем разделе (п. 4.5).
Мощности Nj, Nj имеют разные знаки в
зависимости от того, движется трактор
на подъем или на спуске, разгоняется
или снижает скорость. При подъеме и
разгоне мощности Np N; берут со знаком
«плюс», при спуске и замедлении — со
знаком «минус».Степень совершенства
трактора как тягана и соответствие его
функциональному назначению характеризует
изменение отдельных составляющих
энергетического баланса в зависимости
от тягового усилия на крюке Ркр. Анализ
этих зависимостей позволяет определить
оптимальный диапазон режима работы
трактора в эксплуатации с наибольшей
производительностью и наименьшими
энергетическими потерями,
характеризуемыми КПД. Поэтому составляющие
уравнения энергетического баланса,
не зависящие от тяговой нагрузки (NqqM,
Nkom), не анализируют.Рассмотрим статический
энергетический баланс трактора при
равномерном движении по горизонтальному
участку поля. В этом случае динамические
составляющие и составляющую Nt мощностного
баланса исключают а исходное уравнение
(68) принимает следующий вид:
будут
рассмотрены в третьем разделе (п. 4.5).
Мощности Nj, Nj имеют разные знаки в
зависимости от того, движется трактор
на подъем или на спуске, разгоняется
или снижает скорость. При подъеме и
разгоне мощности Np N; берут со знаком
«плюс», при спуске и замедлении — со
знаком «минус».Степень совершенства
трактора как тягана и соответствие его
функциональному назначению характеризует
изменение отдельных составляющих
энергетического баланса в зависимости
от тягового усилия на крюке Ркр. Анализ
этих зависимостей позволяет определить
оптимальный диапазон режима работы
трактора в эксплуатации с наибольшей
производительностью и наименьшими
энергетическими потерями,
характеризуемыми КПД. Поэтому составляющие
уравнения энергетического баланса,
не зависящие от тяговой нагрузки (NqqM,
Nkom), не анализируют.Рассмотрим статический
энергетический баланс трактора при
равномерном движении по горизонтальному
участку поля. В этом случае динамические
составляющие и составляющую Nt мощностного
баланса исключают а исходное уравнение
(68) принимает следующий вид:
![]() (69)
(69)
Для большей наглядности мощностной баланс трактора изображают графически (рис. 54). Он представляет собой функциональную зависимость составляющих уравнения (69) от тяговой силы на крюке трактора
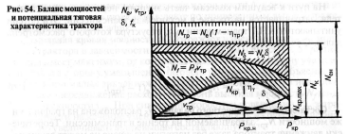
Различают общий и тяговый КПД. Общий КПД учитывает мощность N^p, преобразуемую в тяговое усилие, и мощность на ВОМ. Тяговый КПД рассчитывают для двух случаев: трактор работает в тяговом режиме одновременно с приводом через ВОМ и только в тяговом режиме.
 Коэффициент
полезного действия трактора принято
определять при равномерном движении
его по горизонтальному участку пути,
используя следующие формулы: (74) где
Nnp bom — мощность механических потерь в
приводе ВОМ.Графическая зависимость
тягового КПД трактора в некотором
масштабе совпадает с зависимостью
мощности NKp по потенциальной характеристике
(см. рис. 54). Это видно из выражения (74),
так как Ne = const.
Коэффициент
полезного действия трактора принято
определять при равномерном движении
его по горизонтальному участку пути,
используя следующие формулы: (74) где
Nnp bom — мощность механических потерь в
приводе ВОМ.Графическая зависимость
тягового КПД трактора в некотором
масштабе совпадает с зависимостью
мощности NKp по потенциальной характеристике
(см. рис. 54). Это видно из выражения (74),
так как Ne = const.
23. ТЯГОВАЯ ХАРАКТЕРИСТИКА ТРАКТОРА СО СТУПЕНЧАТОЙ ТРАНСМИССИЕЙ
Основной характеристикой трактора, отражающей его функциональные свойства и соответствие назначению, принято считать тяговую характеристику, выражающую зависимость тяговой мощности, скорости, удельного расхода топлива, буксования и тягового КПД от тягового усилия на крюке. По существу тяговая характеристика — это построенная в других координатахрегуляторная характеристика двигателя, снятая через трансмиссию с учетом взаимодействия движителей с почвой. При снятии как регуляторной, так и тяговой характеристик последовательно повышают или снижают (от некоторого уровня) нагрузку на двигатель и измеряют показатели работы двигателя и трактора.
Рассмотрим пока только зависимости крутящего момента и эффективной мощности от угловой скорости вала двигателя, а также тяговой мощности и скорости трактора от тягового усилия трактора со ступенчатой трансмиссией. ,
Если регуляторную характеристику двигателя (рис. 59, а) перестроить в координатах Ne, юд =f(MK), то она примет вид, изображенный на рисунке 59, б, т. е. вид тяговой характеристики. Тяговая мощность NKp, тяговое усилие Ркр и скорость трактора vTp, используемые в качестве координат для построения тяговой характеристики трактора, представляют собой эффективную мощность Ne, крутящий момент Мк и частоту вращения вала двигателя сод.
![]()

Масштаб \х учитывает
параметры взаимодействия движителей
с почвой, а также передаточное число
трансмиссии /тр, имеющее неодинаковые
значения для разных передач. Это
означает, что каждой передаче
соответствуют конкретные зависимости![]()
На рисунке 60 изображено семейство кривых тяговой мощности трактора с четырехступенчатой коробкой передач. Каждая кривая мощности NKp построена по одной и той же зависимости Ne = ДЛ/К), представленной на рисунке 59, б, но при разных значениях масштаба ц^> учитывающего передаточное число трансмиссии /тр.
При работе трактора на каждой передаче его тяговая мощность увеличивается по мере роста нагрузки Ркр, начиная от нуля при холостом ходе до максимального значения NKp тах. Максимальное значение мощности на тяговой характеристике соответствует точке Ь', на регулятор-ной — точке Ъ (см. рис. 59), т. е. номинальному режиму работы двигателя. Тяговая характеристика левее точки Ь' формируется регуляторным участком регуляторной характеристики, а правее точки Ь' — корректорным участком регуляторной характеристики двигателя.
Точки bub' характеризуют номинальный режим работы двигателя и соответствующие ему тяговый и скоростной режимы работы трактора. Таким образом, на каждой зависимости NKp = J{PKp) есть только одна точка, которой соответствует максимальное значение NKp. На одной из передач трактор обладает наибольшим значением NKp (точка Ь) по сравнению с другими передачами (см. рис. 60). При силе Ркр, соответствующей этим значениям NKp и лт, сумма потерь на буксование и качение минимальная. Как правило, такой передачей должна быть II (у гусеничных тракторов) или III (у колесных тракторов) передача рабочего диапазона, на которой трактор выполняет наиболее энергоемкие операции и занят наибольшее время в году.
Огибающая линия на рисунке 60, соединяющая точки максимальной мощности по передачам, представляет собой потенциальную тяговую характеристику трактора. Степень совершенства тягово-энерге-тических свойств трактора оценивают по тому, как плотно потенциальная тяговая характеристика Огибает тяговые характеристики по передачам.
Ординаты заштрихованных площадей на рисунке 60 характеризуют степень использования тяговой мощности трактора при ступенчатой трансмиссии в сравнении с потенциально возможным ее использованием при бесступенчатой автоматической трансмиссии. Так, при работе с орудием, создающим тяговое сопротивление Р'кр, трактор, оснащенный ступенчатой коробкой передач, может работать с максимальной тяговой мощностью на III передаче в точке с (NKpc), а трактор с прогрессивной трансмиссией будет работать в точке d с мощностью Л^ d. При одинаковой ширине захвата орудия, соответствующей тяговой силе Р кР, разница мощностей NKp с и Л^р ^ определяет разницу скоростей работы трактора, т. е. разную производительность МТА. При бесступенчатой трансмиссии трактора производительность МТА в рассматриваемом примере будет больше, потому что
Степень использования
энергетических![]() возможностей
трактора в эксплуатации характеризует
площадь заштрихованных на рисунке 60
фигур — чем она меньше, тем выше
использование энергетических
возможностей трактора. Сблизить
тяговые характеристики тракторов со
ступенчатой и бесступенчатой трансмиссиями
можно двумя способами: увеличить число
передач. Тогда заштрихованных областей
будет больше, но площадь каждой из
них и их суммарная площадь будет меньше.
Этот способ повышения тягово-энергетических
свойств трактора иллюстрирован на
рисунке 60 дополнительной передачей
1а. При увеличении числа передач до
бесконечности можно получить
бесступенчатую трансмиссию, которая
в сочетании с автоматическим
регулированием /.jp по загрузке
обеспечит потенциальную тяговую
характеристику;
возможностей
трактора в эксплуатации характеризует
площадь заштрихованных на рисунке 60
фигур — чем она меньше, тем выше
использование энергетических
возможностей трактора. Сблизить
тяговые характеристики тракторов со
ступенчатой и бесступенчатой трансмиссиями
можно двумя способами: увеличить число
передач. Тогда заштрихованных областей
будет больше, но площадь каждой из
них и их суммарная площадь будет меньше.
Этот способ повышения тягово-энергетических
свойств трактора иллюстрирован на
рисунке 60 дополнительной передачей
1а. При увеличении числа передач до
бесконечности можно получить
бесступенчатую трансмиссию, которая
в сочетании с автоматическим
регулированием /.jp по загрузке
обеспечит потенциальную тяговую
характеристику;
добиться более пологого изменения зависимости NKp = J[PKp) на каждой передаче без изменения числа передач (штриховая линия III передачи на рис. 60). Это приведет к более полному использованию мощности. Желаемого изменения кривой тяговой мощности можно достичь увеличением запаса крутящего момента двигателя (штриховые линии на рис. 59, а).
24
Типоразмерный ряд сельскохозяйственных тракторов в нашей стране образован по силе тяги. В качестве классификационного параметра принято номинальное тяговое усилие (ГОСГ 4.40—84), т. е. такое его значение, при котором достигается наиболее полное использование тягово-знергетических свойств трактора.
Номинальное тяговое усилие (кН) трактора:
Значение Ркри экспериментально проверяют в процессе тяговых испытаниях трактора (ГОСТ 7057—81) на стерне колосовых. При этом масса трактора должна соответствовать эксплуатационной массе т.,
Методика проведения тяговых испытаний
В соответствии с требованиями ГОСТ 7057-81 тяговая нагрузка на каждой передаче должна изменяться ступенчато от нуля до максимального значения. Число ступеней загрузки - не менее 12. Максимальное тяговое усилие должно ограничиваться началом неустойчивой работы двигателя или буксованием, предельное значение которого для гусеничных составляет 35 % и 30 % для колесных тракторов.
В данной лабораторной работе ступенчатая тяговая нагрузка задается буксировкой трактора МТЗ-80 с неработающим двигателем. Ступенчатость загрузки достигается переключением передач буксируемого трактора. Последовательность включения передач на нем осуществляется по следующей схеме; 1. Нейтральное положение (соответствует- минимальной нагрузке). 2. Девятая передача. 3. Восьмая передача и т.д., до максимально возможной тяговой нагрузки.
Такой способ загрузки испытываемого трактора не в полной мере соответствует требованиям ГОСТ, так как не позволяет получить 12 ступеней загрузки. Однако допускаемая при этом погрешность не велика.
Каждый опыт проводят в следующем порядке. Испытываемый трактор устанавливают в начале вспомогательного участка, включают соответствующую передачу, а акселератор перемещают до упора, что соответствует максимальной частоте вращения холостого хода. Затем разгоняют трактор до установившейся скорости. По ориентиру, соответствующему началу контрольного участка, подается звуковой сигнал, одновременно с которым включается шмерш-ельно-регистрируюпгзя аштратура. В конце контрольного участка по сигналу измерения заканчиваются.
К числу регистрируемых опытных данных относятся:
время опыта-- Топ;
крюковое усилие - Ркр;
число оборотов ведущих колес - nnp, nлев;
расход топлива за Gт.о.п. опыт.
После разворотя на вспомогательном участке опыт повторяют при движении в обратном направлении (2-кратная повторность опытов). Затем тяговую нагрузку по изложенной выше схеме увеличивают и испытания проводят в той же последовательности. Результаты каждого опыта заносят в протокол .
Формулы для расчета оценочных параметров испытаний
Средняя скорость трактора

Средняя тяговая мощность
![]()
Часовой расход топлива

Удельный крюковой расход топлива

Буксование колес

где np и nx - среднее число оборотов ведущих колес при движении трактора с тяговой нагрузкой и холостым ходом соответственно. Условный тяговый кпд трактора

где Nкр.max - максимальная тяговая мощность на данной передаче, кВт; Ne -номинальная эксплуатационная мощность двигателя, определяемая по регу-ляторной характеристике.
25
ДИНАМИЧЕСКИЙ ФАКТОР И ДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА
АВТОМОБИЛЯ
Динамическим фактором автомобиля называют отношение избыточной тяговой силы к весу автомобиля:
D= (PK-Pw)/Ga
Величина D представляет собой обобщенный показатель динамических свойств автомобиля.
PK
= Gafк+
Gai
+ (Ga/g)![]() Bp
ja+
kwFVa2
Bp
ja+
kwFVa2
Сгрупировав члены содержащие вес автомобиля Ga,в правой части,получим
![]()
Левая часть уравнения представляет собой избыточную касательную силу тяги, которая преодолевает силу сопротивления качению и силы инерции. Если обе части уравнения разделить на Ga, то оно примет вид
![]()
При равномерном движении автомобиля j= 0. Следовательно,
D =fк + i= Ψ
Таким образом, при равномерном движении автомобиля динамический фактор численно равен коэффициенту суммарного дорожного сопротивления, т. е. D = Ψ
.

видно, что динамический фактор зависит от скоростного и нагрузочного режимов работы двигателя и автомобиля. Поэтому строят динамическую характеристику автомобиля, представляющую зависимость D=f(Va) по передачам. Это основная характеристика автомобиля, отражающая его тягово-скоростные свойства (рис. 92)
Характерные точки динамической характеристики следующие:
• максимальная скорость va max и динамический фактор при максимальной скорости Dv;
• максимальное значение динамического фактора на первой передаче Dmax и соответствующая ему скорость vD;
• максимальное значение динамического фактора на каждой передаче и соответствующая ему скорость vK (критическая).
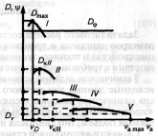 Рис. 92. Динамическая характеристика
автомобиля с пятискоростной коробкойпередач
Рис. 92. Динамическая характеристика
автомобиля с пятискоростной коробкойпередач
26
Тягово-динамические свойства трактора — это свойства, характеризующие способность работы его в условиях динамических воздействий без снижения тяговых и энергетических показателей в сравнении с показателями при статических воздействиях. При работе с установившейся нагрузкой тягово-динамические свойства трактора принято оценивать по энергетическому балансу с учетом динамических составляющих и по степени снижения тяговых показателей вследствие динамичности внешних воздействий. В процессе исследований учитывают также амплитуду колебаний угловой скорости коленчатого вала двигателя и скорости движения трактора.
Тягово-динаминеский расчет представляет собой тяговый расчет, выполненный с учетом того, что трактор является динамической системой, состоящей из отдельных элементов и подверженной динамическим внешним воздействиям.
Тягово-динамические испытания — это тяговые испытания, проводимые на стандартном поле с регламентированной динамической нагрузкой на крюке и с подворотами, имитирующими непрямолинейное движение трактора при выполнении сельскохозяйственных операций.
Тягово-динамические показатели трактора при оценке его работы с установившейся нагрузкой представляют собой параметры, полученные в процессе тягово-динамических испытаний или тягово-динамиче-ского расчета.
К тягово-динамическим процессам относятся также трогание и разгон МТА. Это переходный, или неустановившийся, динамический процесс, поэтому его рассматривают самостоятельно. Основными критериями оценки трогания и разгона МТА принято считать осуществление этого процесса без остановки двигателя и длительность разгона. Эти показатели приняты в качестве основных потому, что они определяют такие функциональные свойства, как производительность и агротехнические показатели.

Тягово-динамическая характеристика трактора. При тяговых испыта-ниях происходит некоторое колебание нагрузки и угловой скорости коленчатого вала двигателя, что вносит существенные изменения в статическое представление о тяговых свойствах трактора.
Из рисунка 77 видно, что колебания нагрузки на нелинейном участке регуляторной характеристики двигателя влияют и на формирование тяговой характеристики трактора. Одним из проявлений этого служит неизбежное относительное смещение точек (а и а') излома характеристик Ne =ЛМК) и Год =J{MK) (рис. 77). Принято считать, что эти точки соответствуют максимуму тяговой мощности и номинальной угловой скорости коленчатого вала двигателя. Зависимости Ne = f[MK) и сод = ДЛ/К), изображенные сплошными линиями, служат основой для формирования тяговой характеристики, а зависимости с участками, изображенными штриховыми линиями, — основой для формирования тягово-динамической характеристики трактора. По аналогии с динамической регуляторной характеристикой двигателя (см. рис. 74) тяговую характеристику, сформированную ею и содержащую участки со штриховой линией, называют тягово-динамической характе ристикой трактора.
,.
Рис. 77. Влияние нелинейности регуляторной характеристики двигателя на зависимости Ne и wд тяговой характеристики трактора
Тяговый КПД трактора. Регламентируемый стандартом метод экспериментального определения КПД трактора заключается в следующем. При разной тяговой нагрузке измеряют средние за опыт значения тягового усилия Ркр на крюке и скорости VTp движения трактора. Далее расчитывают тяговую мощность, находят ее максимальное значение, соответствующее точке Ь' (см. рис. 77),
![]()
Тяговый КПД
![]()
27
Способы снижения уплотнения почвы тракторными движителями.
Снижение вредного воздействия тракторных движителей на почву достигается за счет применения трактора, тип и параметры движителя которого соответствуют данному агрофону, а также правильным выбором состава машинно-тракторного агрегата.
Наиболее радикальное направление снижения вредного воздействия движителей на почву — применение гусеничных тракторов. Однако они менее универсальны, чем колесные, не могут перемещаться по дорогам с твердым покрытием, что препятствует их широкому использо-
ванию в сельскохозяйственных зонах с развитой сетью благоустроенных дорог. В связи с этим проводят большие исследовательские работы по применению резиновой гусеницы. Образцы бесконечной резиновой ленты, армированной стальными тросами, разработаны в Японии и в нашей стране. Тракторы с такой гусеницей (вместо стальной) созданы в НАТИ и проходят испытания.
Вредное воздействие колесных движителей на почву может быть снижено до уровня вредного воздействия гусеничных тракторов несколькими способами. К их числу относятся: сдваивание колес, применение шин низкого давления и арочных шин, создание колесных тракторов колесной формулы 6К6. Модель трактора с колесной формулой 6К6 считают перспективной. Положительные эксплуатационные свойства такого трактора, в том числе агротехнические, повышаются существенным образом, если третий ведущий мост сделать отсоединяемым.
С целью снижения уплотнения почвы колесными тракторами следует применять шины низкого давления, позволяющие работать при давлении воздуха 0,08...0,12 МПа. Для энергетических средств транспорт-но-технологического назначения наиболее эффективным способом снижения вредного воздействия на почву является применение арочных шин. Так, высокую оценку в эксплуатации получила созданная на основе трактора Т-150К машина ЭСВМ-7 для внесения удобрений. Она оснащена арочными шинами шириной 1200 мм и способна перемещаться по вспаханному переувлажненному полю со скоростью 30 км/ч, не создавая при этом глубокой колеи.
Вредное воздействие движителей на почву можно снизить, применяя широкозахватные и комбинированные агрегаты. При работе с широкозахватными агрегатами вредное воздействие движителей на почву уменьшается за счет снижения относительной площади вытаптывания обработанного поля движителями трактора по мере увеличения ширины захвата агрегата. Применение комбинированных агрегатов связано с изменением технологического процесса обработки почвы и возделывания культур. Влияние их на почву рассмотрено далее.
28
Устойчивость от сползания трактора, стоящего поперек склона, считают достаточной, если составляющая силы тяжести трактора, параллельная склону, не больше суммы боковых реакций почвы левого Z2 и правого Z1 бортов.
Gтрsinβφ![]() Z1+Z2
Z1+Z2
Предельное значение боковых реакций почвы на всех колесах можно выразить через вес:
Z1+Z2= φкGтрcosβφ
Тогда:Gтрsinβφ![]() φкGтрcosβφ
φкGтрcosβφ
Или tgβφ![]() φк
φк
Таким образом, сползание трактора со склона не произойдет, если коэффициент сцепления колес с почвой больше тангенса угла наклона поверхности, на которой стоит машина.
Критерием устойчивости против опрокидывания является значение нормальной реакции почвы на колеса машины, расположенные на стороне, противоположной опрокидыванию, Трактор не опрокинется при условии:
Y1![]() 0
0
В качестве оценочного показателя поперечной устойчивости машины принимают предельный статический угол βlim поперечного уклона, на котором она может стоять без опрокидывания.
tgβlim = 0.5Bk/hц.
Для колесного трактора принимают, что точка возможного опрокидывания лежит на середине ширины профиля колеса
Для гусеничного трактора возможной осью опрокидывания является внешняя кромка гусеницы. Тогда:
tgβlim = 0.5(Bk + bг) /hц.
где bг – ширина гусеницы.

На поперечную устойчивость машины при криволинейном движении существенно влияют инерционные силы, возникающие от поворота.
Рассмотрим простейший
случай поворота колесной машины на
горизонтальном участке с установившейся
скоростью и постоянным радиусом
вращения вокруг центра.. При повороте
возникает результирующая центробежная
сила Рц, приложенная к центру тяжести
машины и направленная по радиусу от
центра. С увеличением скорости движения
и уменьшением радиуса поворота
центробежная сила резко возрастает.
Так, при равномер-ной
скорости движения автомобиля vM = 15 м/с
(vM = 54 км/ч) и радиусе поворота Rn = 40 м
боковая составляющая центробежной
силы превышает половину веса машины,
т. е. 0,5GM.
Переход от прямолинейного движения к установившемуся криволинейному с постоянным радиусом поворота сопровождается непрерывным изменением положения центра О\ и радиуса поворота. Происходит ускоренное вращение центра тяжести машины вокруг точки 02> вследствие чего возникает инерционная сила При входе машины в поворот направление действия этой силы такое же, как и силы Р'п, а при выходе из поворота — противоположное.
Факторы (подвеска, эластичность шин, касающиеся оси мостов), снижающие статическую поперечную устойчивость, ухудшают поперечную устойчивость автомобиля и на повороте. Пример отрицательного

влияния подвески на поперечную устойчивость машины показан на рисунке. При повороте координата центра тяжести смещается не только в сторону опрокидывания машины из точки А в точке А1 но и понижается на величину hц — hц1.
29
Проходимость автомобиля. Под проходимостью автомобиля понимают его способность перемещаться без остановки, преодолевая дорожные препятствия двух типов: препятствия профильного характера (стенка канавы, камни и т. д.) и участки дороги со слабонесущим опорным слоем почвы или грунта. Поэтому проходимость автомобиля принято называть дорожной, подразделяя ее на профильную и опорно-сцепную.
Профильная проходимость машины определяется главным образом геометрическими размерами и конкретными конструктивными особенностями, позволяющими машине преодолевать профильные препятствия.
Опорно-сцепная проходимость зависит от свойств движителей и тяго-во-сцепных качеств машины в целом.
Различают автомобили ограниченной, повышенной и высокой проходимости.
Автомобили ограниченной проходимости — это дорожные автомобили, эксплуатируемые на дорогах с твердым покрытием и грунтовых сухих дорогах. С дополнительными приспособлениями, повышающими главным образом сцепные свойства движителей, они могут работать в сложных дорожных условиях.
Автомобили повышенной проходимости представляют собой, как правило, модификации основных моделей автомобилей ограниченной проходимости, отличаясь от них некоторыми конструктивными особенностями: приводом на все колеса, пониженным или регулируемым давлением воздуха в шинах, блокируемым дифференциалом. Некоторые машины оснащают лебедками для самоподтягивания и другими приспособлениями для преодоления препятствий.
Автомобили высокой проходимости должны обладать способностью преодолевать различные рельефные препятствия — канавы, бревна, пни, камни, вертикальные стенки и т. д. Специальные машины создают также для песков, заболоченной местности, условий вечной мерзлоты и Крайнего Севера. Такие автомобили отличаются от автомобилей ограниченной проходимости существенными конструктивными особенностями. Их комплектуют специальными шинами.
Профильная и опорно-сцепная проходимости характеризуются наличием свободной толкающей силы Fn. Когда в общем тяговом балансе сила Fn равна нулю или несколько больше его, то машина еще может перемещаться. Если толкающая сила меньше нуля, машина теряет подвижность. Это условие можно выразить следующим уравнением:
PK-(Pf+Pi) = Fn≥0.
В качестве оценочного критерия удобнее пользоваться безразмерной величиной. Поэтому тягово-сцепные свойства и опорно-сцепную проходимость оценивают по коэффициенту запаса тяговой силы
kТ = PкPΨ.
Коэффициент запаса тяговой силы — это важный показатель степени совершенства машины, соответствия ее функциональному назначению.
Из условий проходимости коэффициент запаса тяговой силы должен быть больше или равен единице: кТ > 1.
Показатели профильной проходимости. Размеры и формы препятствий, вызывающих потерю проходимости, очень разнообразны. Однако все они могут быть приведены, по М. Г. Беккеру, к типу уступ и выступ .Препятствия этих двух типов встречаются раздельно или в сочетании. Тогда они образовывают канаву или насыпь.
Профильная проходимость машины на конкретной дороге определяется ее компоновкой, геометрическими параметрами, диаметром и числом колес, в том числе ведущих.
Основные геометрические параметры автомобиля в соответствии с государственным стандартом — дорожный просвет, углы переднего и заднего свесов, продольный радиус проходимости.
Дорожный просвет — это расстояние /гпр (рис. 143) от дороги до наиболее низкой точки автомобиля, расположенной между колесами. В таблице 5 даны значения дорожного просвета для различных автомобилей.
Углы переднего У] и заднего у2 свесов представляют собой углы между плоскостью, касающейся беговой дорожки шины и наиболее выступающей точки машины
Продольный радиус Rа на рисунке характеризует проходимость автомобиля по неровностям. Чем меньше продольный радиус проходимости при прочих одинаковых геометрических параметрах машины, тем большее препятствие может преодолеть автомобиль, не зависая на нем.
30
Плавность хода и трактора, и автомобиля оценивают по влиянию колебаний главным образом на физическое состояние и здоровье человека. Наряду с этим имеются и другие важные показатели работы машины, зависящие от плавности хода. Так, при эксплуатации грузовых автомобилей на дорогах, покрытия которых с большими неровностями, скорость движения снижается на 40...50 %, межремонтный пробег на 35...40 %, расход топлива увеличивается на 50...70 %, а себестоимость перевозок — на 50...60 %.
Колебания от неровностей профиля дороги и агрофонов составляют некоторую часть общего спектра частот колебаний. Мероприятия по защите водителя от неровностей поля и дороги также составляют лишь часть общих мероприятий. Поэтому проблема плавности хода относится к области динамики машины. Показатели плавности хода являются исходными для общей оценки виброзащиты и должны соответствовать нормам, по которым оценивают свойства безопасности трактора и автомобиля для обслуживающего их персонала.
Водитель и пассажиры оценивают плавность хода субъективно, по собственным ощущениям, которые зависят от интенсивности колебаний и длительности их воздействия. Экспериментально установлено, что хорошая плавность характеризуется вертикальными колебаниями, свойственными человеческому телу при ходьбе 60...90 шагов в минуту, т. е. с частотой 1... 1,5Гц. Организм человека наиболее чувствителен к вертикальным колебаниям в диапазоне частот 4...8 Гц и горизонтальным — в диапазоне 1...2 Гц. При этом колебания воспринимаются по-разному, в зависимости от частот. Низкие частоты воспринимаются пропорционально ускорениям, средние — скоростям, а высокие — перемещениям
МЕРОПРИЯТИЯ ПО ПОВЫШЕНИЮ ПЛАВНОСТИ ХОДА АВТОМОБИЛЯ
Ход подвески. Основной параметр подвески, определяющий плавность хода машины, — ее максимальное перемещение. Оно зависит от расстояния между верхним и нижним ограничителями. График, выражающий зависимость деформации упругого элемента подвески от приложенной статистической нагрузки, называют характеристикой подвески (рис. 136).
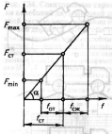
136. Приведенная характеристика подвески
Основной способ повышения
плавности хода состоит в применении
«мягкой» подвески, которая определяется
приведенным статическим ходом fст
(деформацией). На рисунке 137 представлена
зависимость изменения частоты
собственных колебаний ![]() z
подрессоренной массы отстатического
прогиба
z
подрессоренной массы отстатического
прогиба![]() ст
упругого элемента. Из приведенной
зависимости следует, что чрезмерное
увеличение хода
ст
упругого элемента. Из приведенной
зависимости следует, что чрезмерное
увеличение хода![]() ст
приводит к появлению сверхнизких
(
ст
приводит к появлению сверхнизких
(![]() z
< 1
Гц) колебаний, которые вызывают «морскую»
болезнь у водителя и пассажиров.
z
< 1
Гц) колебаний, которые вызывают «морскую»
болезнь у водителя и пассажиров.

Рис. 137. Зависимость частоты собственныхколебаний от статического прогиба упругогоэлемента подвески
Нелинейные характеристики. Применение мягкой подвески при движении по неровностям может иногда приводить к пробою и вызывать удары об ограничители подвески. Чтобы этого избежать, применяют подвески с нелинейной характеристикой, в которой используются упругие элементы с переменной жесткостью. Изменение жесткости в зависимости от нагрузки может выражаться плавной или ломаной характеристикой с одним (рис. 138, б) или несколькими изломами. При этом малым нагрузкам GH на подвеску (рессора 7) соответствует «мягкий» участок характеристики с углом а.\. При увеличении GH жесткость повышается (в работу включается рессора 2), соответствуя углу сс2. Реализация в конструкции такой характеристики со ступенчатым изменением жесткости показана на рисунке 138, 6.

Рис. 138. Подвеска с дополнительной рессорой:а — схема конструкции; б — характеристика
Нелинейность амортизаторов (рис. 139) также повышает плавность хода автомобиля. Как и нелинейная характеристика упругого элемента подвески, нелинейность характеристики амортизатора имеет «мягкие» и «жесткие» участки. Последовательность включения в работу этих участков амортизатора согласуется с изменением нагрузки на подвеску: вначале — «мягкий» участок, затем «жесткий» и в конце отбоя также «мягкий».
Пневматические подвески. В пневматической подвеске в качестве упругого элемента используется воздух, находящийся под давлением в герметично замкнутом резервуаре. Преимущество этой подвески заключается, прежде всего, в возможности регулирования жесткости пневмоэлемента. За счет этого можно получить лучшую характеристику по сравнению с подвеской на основе механического упругого элемента. Пневматическая подвеска по сравнению с механической имеет ббльший срок службы и более высокую чувствительность к неровностям. К недостаткам пневматической подвески относят ее сложность (особенно регулируемой подвески) и высокую стоимость.
 Рис. 139. Нелинейная
характеристика гидравлического
амортизатора
Рис. 139. Нелинейная
характеристика гидравлического
амортизатора
31
По управляемостью понимают способность машины двигаться по заданной траектории с требуемой точностью при воздействии водителя на механизм управления.Управляемость обусловлена двумя свойствами машины: устойчивостью при неуправляемом движении и реакцией на управляющее воздействие водителя. Эти два альтернативных свойства должны быть присущи машине в определенном соотношении. Тогда машина в целом будет обладать хорошей управляемостью. Учитывая, что разграничить эти качества машины весьма трудно, их часто рассматривают совместно.В теории автомобиля различают траекторные и курсовые отклонения. Траекторное отклонение — это отклонение вектора скорости машины от заданного направления. Курсовое отклонение — отклонение продольной оси машины от направления траектории движения. В соответствии с этими определениями различают курсовую управляемость и курсовую устойчивость.
СПОСОБЫ ПОВОРОТА КОЛЕСНЫХ МАШИН
Различают следующие способы поворота:
-управляемыми колесами только передней оси (рис. 169, а);
-управляемыми колесами обеих осей двухосной машины (рис. 169, б);
-бортом за счет создания разности крутящих моментов на ведущих
колесах кинематически или торможением (рис. 169, в);
-комбинация первого или второго способа с третьим (рис. 169, г);
-с помощью шарнирно
сочлененной рамы (рис. 169, д).

СТАБИЛИЗАЦИЯ УПРАВЛЯЕМЫХ КОЛЕС
Установка шкворней. Поперечный наклон шкворней (рис. 176) вызызывает подъем автомобиля при повороте колеса вокруг оси аа, что следует из кинематики соединительного устройства шкворня с осью. Будучи выведенным из нейтрального положения, колесо стремится занять исходное положение под действием приходящейся на него части веса автомобиля. Эта же вертикальная нагрузка будет удерживать его от самопроизвольного выхода из нейтрального положения. Момент в пятне контакта колеса с дорогой, возникающий вследствие кинематики соединительного устройства шкворня с осью и удерживающий управляемое колесо от самопроизвольного поворота, называется стабилизирующим моментом.
Кинематика колеса со шкворнем, наклоненным в продольной плоскости под углом у к вертикали и установленным вертикально, но со смещением относительно оси колеса (рис. 177, а) аналогичны. В обоих случаях момент от боковых сил всегда стремится вернуть колесо в нейтральное положение. В соответствии с рисунком 177,5 стабилизирующий момент управляемого колеса с жестким ободом при качении по несминаемой поверхности
![]() ,
где
,
где
![]() -боковая реакция,
действующая перпендику-ми|1мо к плоскости
качения колеса.
-боковая реакция,
действующая перпендику-ми|1мо к плоскости
качения колеса.

Рис. 177. Схема стабилизации управляемого колеса со смешением шкворня без наклона (а), за счет наклона шкворня в продольной плоскости при недеформируемом ободе (б) и деформируемом (в)
При качении эластичного колеса по несминаемой поверхности точка приложения равнодействующей боковых реакций смещается назад на величину е (рис. 177, в)
![]()
Как видно из полученного
выражения, при одинаковой боковой
реакции
![]() плечо
и стабилизирующий момент колеса с
эластичной шиной больше стабилизирующего
момента колеса с жестким ободом.
плечо
и стабилизирующий момент колеса с
эластичной шиной больше стабилизирующего
момента колеса с жестким ободом.
Боковая реакция Кг и стабилизирующий момент от наклона шкворня в продольной плоскости зависят от скорости движения автомобиля в квадрате, потому что основной составляющей боковой реакции при высокой скорости движения автомобиля является реакция на центробежную силу. Большой стабилизирующий момент затрудняет управление автомобилем с высокоэластичными шинами при движении с высокой скоростью. Поэтому в обоснованных случаях шкворни устанавливают вертикально или даже с обратным наклоном.
Развал колес. Колеса устанавливают наклонно (рис. 178, а) к горизонтальной плоскости под углом р, называемым углом развала. Этим достигаются три важных для эксплуатации фактора.
1. Сила сопротивления качению /у создает момент сопротивления повороту колеса на плече с при установке его с развалом и на плече с\ при установке вертикально. На меньшем плече (с < с\) момент сопротивления повороту меньше, поэтому управление автомобилем (трактором) легче.
2. При установке с развалом колесо поджимается к внутреннему коническому подшипнику ступицы, что исключает или снижает виляние колеса в случае появления зазора в подшипниках ступицы.

Рис. 178. Развал (в) и схождение (б) управляемых колес
3. Установка колес с развалом предотвращает обратный развал при |П11осс цапф шкворней.
Для современных тракторов
с = Ь/2- 10...30
мм (здесь Ь —
ширина шины), а угол ![]() = 1,5...4°.
= 1,5...4°.
Развал управляемых колес плохо сочетается со сдваиванием колес, применяемым на тракторах с целью повышения их тягово-сцепных гпойств и снижения давления на почву.
Схождение колес. Наклон колеса к поверхности качения вызывает боковой увод его в сторону наклона, т. е. колеса стремятся разойтись: левое — налево, правое — направо. Поверхность качения колеса формирует поверхность конуса, а не цилиндра, что вызывает проскальзывание и интенсивное изнашивание шин. Для устранения этого явления вводят схождение колес (рис. 17, б). Расстояние А между колесами впереди делают меньше (на 1.. .4 мм в автомобилях и на 2.. .8 мм в тракторах), чем расстояние В сзади. Касательные и боковые реакции дороги, а также удары, действующие на колеса, стремятся вызвать их отрицательное схождение. В связи с наличием зазоров и рулевой трапеции и других соединениях управляемым коле-I им придается несколько большее схождение, чем необходимо из условий компенсации только развала колес.
Схождение колес повышает коэффициент сопротивления качению, как показано на рисунке 179.

Рис. 179 Зависимость относительного увеличения сопротивления качению управляемых колёс от угла схождения колёс