

Электропривод скоростных и высокоскоростных лифтов
В скоростных и высокоскоростных лифтах в основном применяются тиристорные электроприводы постоянного тока. Тиристорные преобразователи выполняются с совместным и раздельным управлениями и подчиненной системой автоматического регулирования. Регуляторы тока и скорости выполнены как ПИ регуляторы. Пуск и замедление осуществляются под контролем комбинированного задатчика интенсивности (см.главу 23). Точность остановки достигается с помощью регулятора положения. Подробно о схеме можно узнать в [4-12].
Иностранные фирмы например «Хитачи», «Коне» наряду с электроприводом постоянного тока начали применять электропривод переменного тока на базе преобразователя частоты со звеном постоянного тока с силовыми транзисторами.
Корпорация KONE выпускает скоростные и высокоскоростные лифты грузоподъемностью 800 и 1600кг с электроприводом типа V3 F-40-V3F-160 переменного тока по системе ПЧ-АД на базе инвертора напряжения.
Напряжение сети 240–420В, выходное напряжение преобразователя 0,9Uc.
Инвертор собран на базе силовых транзисторов с широтно-импульсной модуляцией. Применение транзисторов позволяет получить частоту импульсов напряжения до 2000гц. Выпрямительный трехфазный мост собран на диодах, что позволяет получить коэффициент мощности не менее 0,9. Привод может поставляться с рекуперативным или динамическим торможением. Электропривод с системой автоматики собран по модульному принципу.
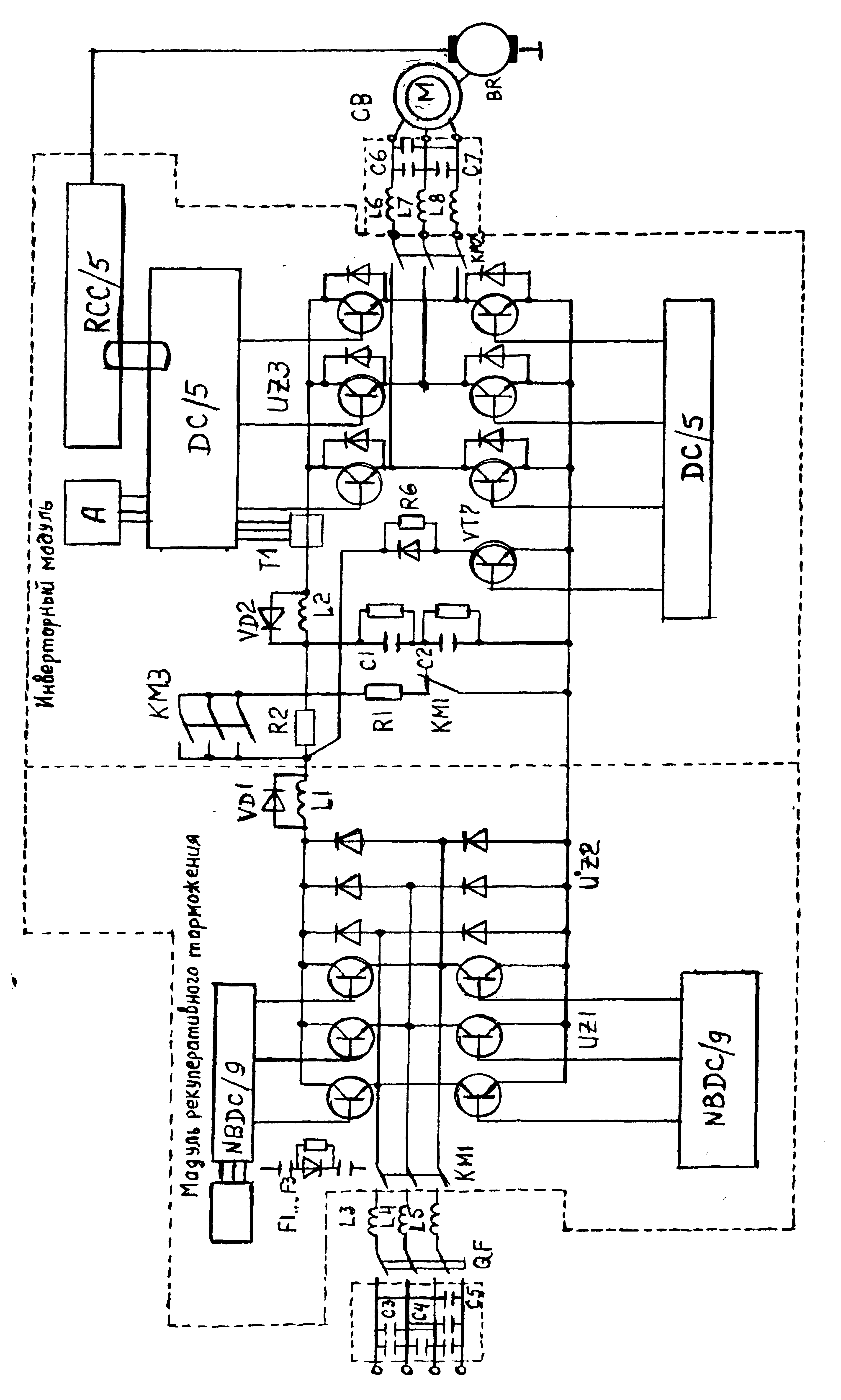
Общая схема электропривода представлена на рис 26.27.
Привод включает в себя:
Асинхронный короткозамкнутый электродвигатель М.
Модульный выпрямитель UZ2.
3. Модуль рекуперативного торможения UZ1, в который также входит дроссель L1, диод VД1. При поставке преобразователя частоты с динамическим торможением транзисторный мост с дросселем L1 и диодом VД1 отсутствует. Управление блоком рекуперации осуществляется электронным блоком NBДС/9.
4. Инверторный модуль UZ3-содержит транзисторный и диодный мост. Транзисторный мост представляет собой преобразователь частоты с широтно-импульсной модуляцией. Рекуперация энергии осуществляется диодным мостом. В модуль инвертора также входят, главные контакторы КМ1, КМ2, контактор зарядки конденсаторов КМ3, тормозной транзистор VT7, зарядный и разрядный резисторы R2 и R1,резистор динамического торможения R6, фильтр, состоящий из конденсаторов (С1,С2) и дросселя L2, диод VД2 и датчик тока T1. Управление инвертором осуществляется двумя платами электроники ДС/5 и RСС/5. В системе регулирования в качестве управляющих воздействий приняты частота и напряжение статора. САР поддерживает магнитный поток на заданном уровне с помощью обратной связи по скорости.
5. Фильтр сетевых помех состоит из трех дросселей (L3,L4,L5) и конденсаторов (С3,С4,С5). Фильтр отфильтровывает высокочастотные помехи (150кГц...30 МГц) возникающие в ПЧ, в частности при торможении двигателя.
6. Модуль звукового фильтра удаляет шум, вызываемый частотой коммутации инвертора. Модуль состоит из катушек шумового фильтра (L6,L7,L8) и конденсаторов (С6,С7,С8).
7. Выключатель автоматический QF.
Система автоматики состоит из двух модулей рис.26.28.
1. Модуль задания скорости, с помощью которого регулируется скорость, ускорение и замедление лифта, а также определяется место остановки лифта.

2
Рис.26.28.
Функциональная схема автоматики лифта
VSF .
Компьютер типа ТМS сле-дит и контро-лирует
движе-ние лифта во всех ситуациях и дает
задание на ускорение, замедление и
остановку лиф-та, т.е. в
.
Компьютер типа ТМS сле-дит и контро-лирует
движе-ние лифта во всех ситуациях и дает
задание на ускорение, замедление и
остановку лиф-та, т.е. в
Работа лифта основана на совместном действии привода U3F, ЭВМ, модуля задания скорости, датчика нагрузки (весов), а также двигателя и тахогенератора.
Компьютер ТМ3 дает команду модулю задания скорости на задание скорости. Сигнал на задание скорости плавно увеличивается с помощью цифрового задатчика интенсивности. Чтобы трогание происходило без рывков, дается информация о нагрузке лифта и информация о фактической скорости, которая также используется как обратная связь в регуляторе скорости САР, ее контроля и преобразования в импульсы. Импульсы с модуля задания скорости поступают в компьютер для расчета положения лифта.

Рис.26.29. Функциональная схема системы управления инвертором привода V3F
В начале пуска тормоз лифта отпускается и лифт удерживается на месте (без просадки) с помощью сигнала нагрузки (весов). Затем напряжение задания скорости начинает возрастать, а, следовательно, увеличивается частота и напряжение на двигателе. Это происходит таким образом, что с помощью задания частоты и напряжения (рис.26.29) образуют задание синусоиды, которые с помощью ШИМ преобразуются в серию импульсов. Эти импульсы усиливаются на плате ДС/5 инвертора и подаются на базу транзистора. При достижении номинальной скорости пуск завершается.
Замедление лифта происходит также по команде компьютера TMS. При этом с помощью задатчика интенсивности снижается задание на частоту и напряжение, в результате чего двигатель начинает работать в режиме сверхсинхронной скорости, т.е. ротор вращается быстрее, чем магнитное поле статора, и двигатель работает как генератор. Напряжение, выпрямленное диодным мостом, повышается и через транзисторный мост отдается в сеть. При динамическом торможении выработанная двигателем энергия поглощается тормозным резистором R6.