

26.3.4. Типовые электроприводы крановых механизмов
В зависимости от назначения и типа крана, вида механизма и требований, предъявленных к приводу, применяются различные системы крановых электроприводов.
Промышленностью выпускаются комплектные крановые электроприводы и панели управления электродвигателями. Ниже приведены основные из них [4-25].
Электроприводы постоянного тока: а) с управлением магнитным контроллером МК-ДП (магнитным контроллером, называют устройство управления, состоящее из командоконтроллера и контакторных панелей);
б) по системе тиристорный преобразователь – двигатель ТП-Д;
в) по системе генератор- двигатель Г-Д.
Электроприводы переменного тока:
а) с односкоростным или двухскоростным асинхронным короткозамкнутым двигателем, управляемым магнитными пускателями, МП-АДК, МП-АДД;
б) с асинхронным двигателем с фазным ротором, управляемым магнитным контроллером с торможением противовключением, МКП-АДФ;
в) с асинхронным двигателем с фазным ротором, управляемым магнитным контроллером с динамическим торможением с самовозбуждением СМКД-АДФ;
г) по системе асинхронный двигатель с фазным ротором – управляемый тиристорный преобразователь напряжения ТПН-АДФ;
д) асинхронный двигатель с фазным ротором, управляемый магнитным контроллером с тиристорным импульсно-ключевым регулированием МКИ-АДФ;
е) по системе тиристорный преобразователь частоты с непосредственной связью – двухскоростной асинхронный короткозамкнутый двигатель (НПЧ-АДД).
Технические данные некоторых из указанных приводов приведены в таблице 26.4.
Таблица 26.4
Технические данные типовых электроприводов кранов
|
Тип электропривода |
Механизм |
Диапазон регул. Скорости |
Тип магнит. Контроллера и преобразователя |
Наибольшая расчетная мощность электродвигателя, кВт при Uном=380В |
Тип кранов | |||
|
1М-3М |
4М |
5М |
6М | |||||
|
МК-АДД |
Подъем, пере-движение |
6:1 3:1 |
Б5701 Б5701 |
22 22 |
18,5 18,5 |
- - |
- - |
Облегченные |
|
МКД-АДФ |
Подъем, крюковой, грейферный |
8:1 при спуске |
ТСД60, ТСД160, ТСД250, ТСД400, ТСДГ160 |
37, 85, 140, 250, 85 |
30, 70, 110, 200, 70 |
25, 58 90, 160 58 |
- |
Краны мостовые козловые, башенные, где требуется диапазон регулирования 8:1 |
|
|
|
|
|
|
|
|
|
|
|
Продолжение таблицы 26.4 | ||||||||
|
МКИ-АДФ |
Передвижение |
10:1 |
БОК6511, БОК6502 |
37 2х18,5 |
30 2х15 |
22 2х11 |
- |
Все типы кранов, где требуются жесткие характеристики |
|
ТПН-АДФ |
Подъем, пере-движение |
4:1 Подъем 8:1 Спуск 8:1 Передвижение |
П6512...ПУ ПС512...КУ |
|
До 80 |
|
|
Контейнерные краны с двухдвигательными и кратным двум двигателями приводами |
|
НПЧ-АДД |
Поворот, пере-движение |
(10...20):1 |
ТТС40, ТТС100 Б004 |
|
|
24 60 |
|
Башенные краны |
|
МК-ДП |
Подъем, передвижение |
6...1 |
ПСО160...ПС630 ПСО...П630 или (ДП) двухдвигательный |
38, 150 |
30...125 |
25...100 |
16...80 |
Мостовые металлургические краны |
|
ТП-Д |
Подъем, поворот |
40:1
|
ТПЕ, панель управления П9203 |
|
240 |
|
|
Башенные краны |
|
|
Поворот, пере-движение |
100:1 |
Комплексный привод ЭТУ 360 |
|
20 |
|
|
Краны штабелеры |
Ниже рассмотрены некоторые из типовых схем, применяемых в приводах кранов.
Схема электропривода механизма подъема с панелью ТСДИ
Электропривод с магнитным контроллером типа ТСДИ рис.26.5 обеспечивает динамическое торможение асинхронного двигателя с самовозбуждением при спуске и импульсно-ключевое регулирование при подъеме. Электроприводы с динамическим торможением с самовозбуждением выполняются только для механизмов подъема с целью получения жестких тормозных характеристик при спуске (рис.26.6), что позволяет увеличить диапазон регулирования скорости до значения 8:1. С помощью импульсно-ключевого регулирования получают жесткую характеристику на первой позиции при подъеме, что также повышает диапазон регулирования до (6...4):1.
Рис.26.6.
Механические характеристики электропривода
при управлении панелью ТСДИ
Рис.26.5.
Схема электропривода механизма подъема
с панелью ТСДИ и электросхемы реле
времени (а)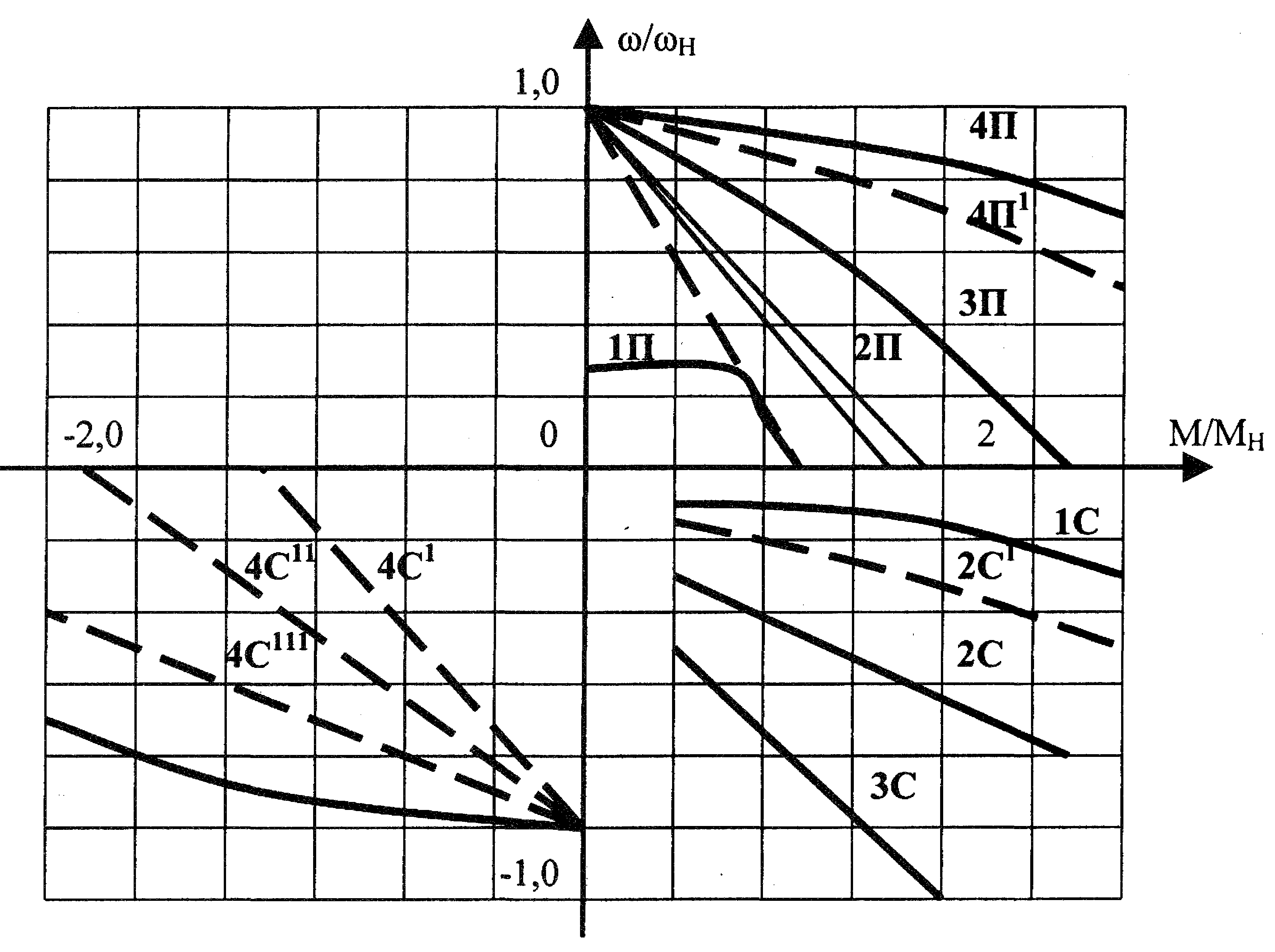
 Реверс осущес-твляется
контакто-рами КМ1В КМ2В, динамическое
тор-можение – контак-тором КМ2. Для
по-вышения надежно-сти электропривода
в режиме динами-ческого торможения с
самовозбуждением применяют началь-ное
подмагничивание. Питание дви-гателя
постоянным током при началь-ном
подмагничива-нии осуществляется от
сети через кон-такты контактора КМ4,
сопротивле-ние R1,
диод V1,
ка-тушку реле КА2, контакта контактора
КМ2. Контактами КМ2 также подключаются
две фазы двигателя к выпрямителю UZ1.
Регу-лирование скорости осущес-твляется
контакторами КМ1V...КМ4V.
Жесткие ха-рактеристики при динами-ческом
торможении само-возбуждением получаются
из-за изменения постоян-ного тока,
питающего об-мотку статора при изме-нении
нагрузки. Узел им-пульсно-ключевого
регули-рования ИКР, включает в себя
тиристоры VS1...VS3,
формирователь импульсов на резисторах
R2...R4,
измерительный мост UZ2,
подключенный к цепи ротора через
конденсаторы С1 с выходом на резисторы
R7,
R8,
стабилитроны VD1
и VD2.
В схеме применены полупроводниковые
реле времени КТ2...КТ4, условно показанные
в цепи управления блоками. Схема реле
времени приведена на рис.26.5а.
Реверс осущес-твляется
контакто-рами КМ1В КМ2В, динамическое
тор-можение – контак-тором КМ2. Для
по-вышения надежно-сти электропривода
в режиме динами-ческого торможения с
самовозбуждением применяют началь-ное
подмагничивание. Питание дви-гателя
постоянным током при началь-ном
подмагничива-нии осуществляется от
сети через кон-такты контактора КМ4,
сопротивле-ние R1,
диод V1,
ка-тушку реле КА2, контакта контактора
КМ2. Контактами КМ2 также подключаются
две фазы двигателя к выпрямителю UZ1.
Регу-лирование скорости осущес-твляется
контакторами КМ1V...КМ4V.
Жесткие ха-рактеристики при динами-ческом
торможении само-возбуждением получаются
из-за изменения постоян-ного тока,
питающего об-мотку статора при изме-нении
нагрузки. Узел им-пульсно-ключевого
регули-рования ИКР, включает в себя
тиристоры VS1...VS3,
формирователь импульсов на резисторах
R2...R4,
измерительный мост UZ2,
подключенный к цепи ротора через
конденсаторы С1 с выходом на резисторы
R7,
R8,
стабилитроны VD1
и VD2.
В схеме применены полупроводниковые
реле времени КТ2...КТ4, условно показанные
в цепи управления блоками. Схема реле
времени приведена на рис.26.5а.
Управление осуществляется от командоконтроллера, имеющего по четыре фиксированных положения в каждую сторону движения. Схема выполнена несимметричной. Регулирование скорости в сторону подъема осуществляется изменением сопротивления ступеней резисторов в роторной цепи под контролем реле времени КТ2...КТ4. На первой позиции командоконтроллера контактор КМ1 - разомкнут и в цепь ротора включены все резисторы на стороне переменного тока и резисторы R11 на стороне постоянного тока. Для выпрямления напряжения служит полууправляемый мост, состоящий из тиристоров VS1...VS3 и диодов UZ1. При напряжении больше пробоя стабилитрона VD1 по оптрону VS4 протекает ток и тиристоры VS1...VS3 открываются, двигатель работает на характеристике с полным сопротивлением. При уменьшении напряжения на стабилитроне VD1 ниже его номинального значения, по оптрону ток не протекает и тиристоры закрываются. При снижении скорости э.д.с. ротора повышается и тиристоры открываются.
Такая работа схемы регулирования позволяет создать жесткую механическую характеристику 1П. На второй позиции включается контактор КМ1V и шунтирует выпрямительную схему, двигатель переходит на характеристику 2П и т.д.
Режим динамического торможения реализуется на всех положениях спуска, кроме последнего, на котором двигатель работает от сети и спуск осуществляется в режиме рекуперативного торможения. Недостатком схемы является невозможность спуска легких грузов с малой скоростью, а также отсутствие на 1-ой...3-ей позициях спуска перехода с тормозного в двигательный режим.
У
Рис.26.7. Упрощенная
силовая схема электропривода с панелями
управления П6502
380В
Рис.26.7.
Упрощенная силовая схема электропривода
с панелями управления П6502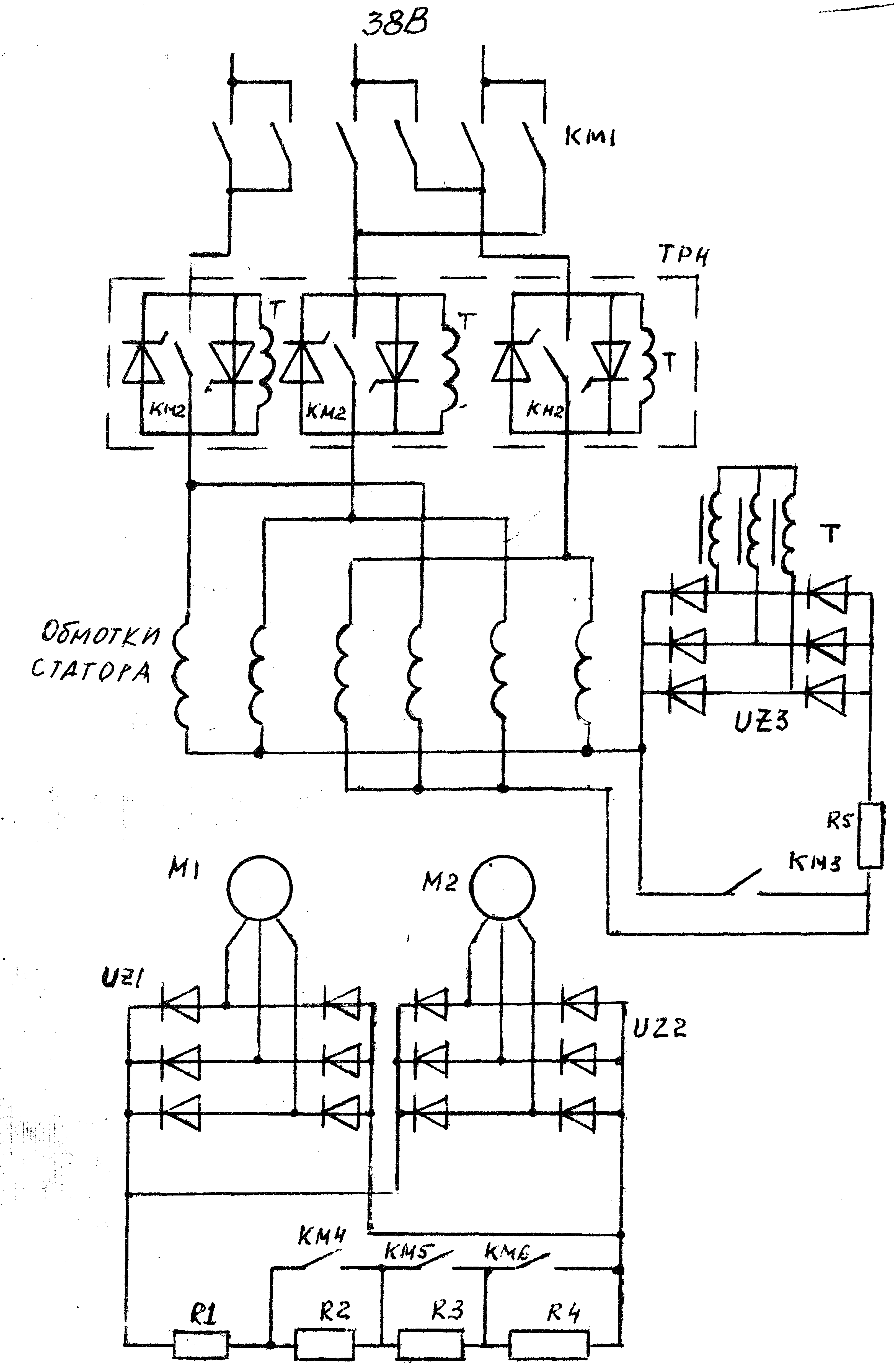 ение
каждого полупериода питающей се-ти, что
осуществляется по специальной схеме
питания статорных обмоток электродвигателя
(рис. 26.7) при 2 и 2n
электродвигателях. Схема позволяет
осуществить од-новременное питание
элек-тродвигателей постоянным и
переменным токами. К на-чалам обмоток
электродви-гателей подводится трех-фазное
напряжение пере-менного тока от
тирис-торного регулятора напря-жения
ТРН, а к концам обмоток каждых двух
элек-тродвигателей, соединен-ных в две
звезды (звездой объединяются две ф
ение
каждого полупериода питающей се-ти, что
осуществляется по специальной схеме
питания статорных обмоток электродвигателя
(рис. 26.7) при 2 и 2n
электродвигателях. Схема позволяет
осуществить од-новременное питание
элек-тродвигателей постоянным и
переменным токами. К на-чалам обмоток
электродви-гателей подводится трех-фазное
напряжение пере-менного тока от
тирис-торного регулятора напря-жения
ТРН, а к концам обмоток каждых двух
элек-тродвигателей, соединен-ных в две
звезды (звездой объединяются две ф
О
Рис.26.8.
Механические характеристики
электропривода, выполненного на рис.26.7
в 1 и 2 квадранте