

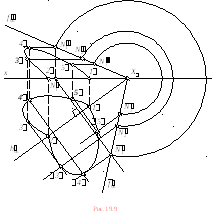
19.2. Цилиндр (рис.19.5)

1. В цилиндр вписываем правильную
шестиугольную призму ABCDEF(рис.19.6).
Поскольку секущая плоскостьпересекает основание цилиндра, две
точки, лежащие в сечении, очевидны: точки
1 и 2 лежат в пересечении горизонтального
следа![]() c нижним основанием.
c нижним основанием.
2. Строим точки встречи ребер призмы А, В и С с плоскостью . Рассмотрим построение на примере точки 3 – точки встречи ребра призмы А с плоскостью. Через реброАпроводим вспомогательную плоскость (например, фронтально-проецирующую плоскость). Строим линию пересеченияM1N1вспомогательной плоскостии плоскости:

![]() =
=![]()
![]() ,
,
![]() Хх
Хх
(![]() и Х
на чертеже не показаны);
и Х
на чертеже не показаны);
![]() =
=![]()
![]() ,
,![]() х.
х.
Определяем проекции точки 3:
3– в пересечении
![]() с горизонтальной проекцией ребраА,3– по линии
проекционной связи, проведенной до
пересечения с проекцией ребраА.
с горизонтальной проекцией ребраА,3– по линии
проекционной связи, проведенной до
пересечения с проекцией ребраА.
3. Проведя вспомогательные плоскости и, находим точки4и5, в которых ребраВиСпересекаются с плоскостью(рис.19.7).
4. Соединив точки 2, 3, 4, 5 и 1 плавной кривой линией получим сечение цилиндра плоскостью (рис.19.8). В данном случае сечение представляет собой часть эллипса, ограниченного отрезком 12.

5. Определяем видимость сечения относительно поверхности цилиндра. В направлении на плоскость проекций 1часть контура сечения, ограниченная точками1-2-3-4и образующей цилиндра, будет невидима, а в направлении на плоскость2невидимой будет кривая3-4-5-1.
7. Совмещаем
плоскость
с плоскостью проекций 1
путем ее вращения вокруг горизонтального
следа
![]() (см. задачу 14).
(см. задачу 14).
Строим горизонтали,
проходящие через точки сечения 3,
4
и 5.
Определяем совмещенное с горизонтальной
плоскостью проекций положение фронтального
следа
![]() плоскости.
В совмещенном с плоскостью 1
положении горизонтальные проекции
горизонталей будут параллельны следу
плоскости.
В совмещенном с плоскостью 1
положении горизонтальные проекции
горизонталей будут параллельны следу
![]() .
.
8. Проекции точек 1и2остаются
неподвижными, поскольку они лежат на
горизонтальном следе
![]() ,
являющемся осью вращения. Проекции
точек3,4и5находим на пересечении горизонтальных
следов плоскостей вращения, проходящих
через точки3,
4 и5и перпендикулярных горизонтальному
следу
,
являющемся осью вращения. Проекции
точек3,4и5находим на пересечении горизонтальных
следов плоскостей вращения, проходящих
через точки3,
4 и5и перпендикулярных горизонтальному
следу
![]() ,
с соответствующими горизонтальными
проекциямигоризонталей.
Часть эллипса
,
с соответствующими горизонтальными
проекциямигоризонталей.
Часть эллипса
![]() 1-
2-3-4-5
– есть истинная величина построенного
сечения.
1-
2-3-4-5
– есть истинная величина построенного
сечения.
Задача 20
Построить точки пересечения прямой LT с поверхностью заданного геометрического тела. Показать видимость прямой относительно поверхности геометрического тела. Построить развертку полной поверхности геометрического тела и нанести на нее точки пересечения.
20.1. Пирамида (рис.20.1)
1. Через заданную прямую LTпроведем вспомогательную плоскость, например фронтально-проецирующую плоскость(рис.20.2).
2. Строим сечение пирамиды этой вспомогательной плоскостью – треугольник123.
3. Точки пересечения K1 иK2прямойTLс контуром сечения (треугольником123) являются точками пересечения прямой с поверхностью заданного геометрического тела.
4. Определяем видимость прямой
относительно поверхности пирамиды: в
направлении на 1будет невидимым отрезок, ограниченный![]() и проекцией ребраSB;
в направлении на2– отрезок, ограниченный
и проекцией ребраSB;
в направлении на2– отрезок, ограниченный![]() и проекцией ребраSA.
и проекцией ребраSA.

![]() является натуральной величиной ребраSA. Аналогично построены отрезки
является натуральной величиной ребраSA. Аналогично построены отрезки![]() и
и![]() ,
являющиеся истинными величинами реберSBиSC.
,
являющиеся истинными величинами реберSBиSC.
6. Строим развертку заданной пирамиды
методом треугольников (рис.20.4).
На чертеже произвольно выбираем точкуS0, из которой в любом направлении
проводим лучS0A0. На
этом луче откладываем натуральную
величину отрезкаSA, равную
![]() Из точкиА0проводим дугу
радиусомR1 = АС,
из точкиS0– радиусомR2 =
Из точкиА0проводим дугу
радиусомR1 = АС,
из точкиS0– радиусомR2 =![]() и в пересечении дуг
получаем точку С0.
Далее к стороне S0C0
пристраиваем треугольник S0C0B0,
две другие стороны которого определены
следующим образом:
и в пересечении дуг
получаем точку С0.
Далее к стороне S0C0
пристраиваем треугольник S0C0B0,
две другие стороны которого определены
следующим образом:
![]() иС0B0=CB.
иС0B0=CB.
Аналогично построен и третий треугольник S0B0A0.
7. Построенную развертку поверхности пирамиды дополняем основанием – треугольником А0В0С0. При этом длина его сторон может быть определена по сторонамА0С0,С0В0,В0А0, уже имеющимся на развертке.
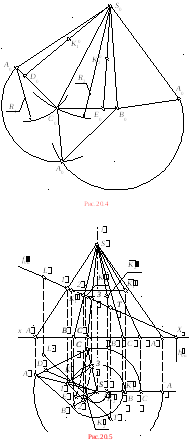
8. На построенную развертку наносим точки пересечения K1иK2прямойLTс поверхностью пирамиды. Для этого на эпюре через точки пересечения и вершину пирамидыSпроводим вспомогательные отрезкиSEиSD(рис.20.5) и наносим их на развертку:
B0E0 = BE ; A0D0 = AD.
Определяем методом вращения истинные величины расстояний от вершины Sдо точекK1иK2и отмечаем их положение на развертке:
S![]() = S0
= S0![]() ;
S
;
S![]() = S0
= S0![]() .
.
Рис.20.7
T
L
T
L
1
х
2
3
1
2
3
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()


































![]()



![]()


![]()



















![]()









1. Через заданную прямую проводим вспомогательную плоскость, например фронтально-проецирующую плоскость (рис.20.7).

3. Определяем видимость прямой относительно поверхности призмы в направлении на плоскости 1 и 2.
4. Строим развертку заданной призмы методом раскатки. Основания призмы спроецированы на плоскость 1в натуральную величину, а ее ребра с искажением. Для построения развертки первоначально преобразуем положение призмы так, чтобы ее ребра спроецировались на одну из новых плоскостей проекций в натуральную величину.
5. Вводим
дополнительную плоскость проекций 4,
перпендикулярную плоскости 1
и параллельную ребрам призмы (рис.20.8).
Тогда на плоскости 4
ребра проецируются в натуральную
величину (проекции
![]() ,
,![]() и
и![]() ).
).
6. Вращением вокруг ребра B1B2 совмещаем с плоскостью чертежа грань А1А2В2В1 (рис.20.9). Точки В1 и В2 лежат на оси вращения и, следовательно, при вращении своего положения не изменяют.

![]() перпендикулярно ребру
перпендикулярно ребру![]() проводим прямую, являющуюся следом
плоскости вращения точкиA1.
Затем из точки
проводим прямую, являющуюся следом
плоскости вращения точкиA1.
Затем из точки
![]() проводим дугу радиусомR, равным
натуральной величине стороны основанияА1В1(А1В1=
проводим дугу радиусомR, равным
натуральной величине стороны основанияА1В1(А1В1=![]() ).
В пересечении дуги с плоскостью вращения,
проведенной ранее из
).
В пересечении дуги с плоскостью вращения,
проведенной ранее из![]() ,
получим точку
,
получим точку![]() .
По той же схеме найдем
.
По той же схеме найдем
![]() .
Параллелограмм
.
Параллелограмм
![]() является натуральной величиной граниА1В1В2А2.
является натуральной величиной граниА1В1В2А2.
7. Аналогично строим грани
![]() и
и![]() .
К полученной развертке боковой поверхности
достраиваем основания
.
К полученной развертке боковой поверхности
достраиваем основания![]() и
и![]() .
Построенная фигура является разверткой
полной поверхности заданной призмы.
.
Построенная фигура является разверткой
полной поверхности заданной призмы.
8. Находим на развертке положение точек K1 и K2. Для этого через точку K1 проводим вспомогательную прямую ED, а через точку K2 – прямую FG, параллельные ребрам (см. рис.20.8). Затем находим положение этих вспомогательных прямых и точек K1 и K2 на плоскости 4 и на развертке.