

Физика / Теоритическая механика в задачах и примерах
.pdfΩ VC |
|
VC |
3,46 c 1 . |
(4.1) |
|
r cosα |
|||||
hP |
|
|
|
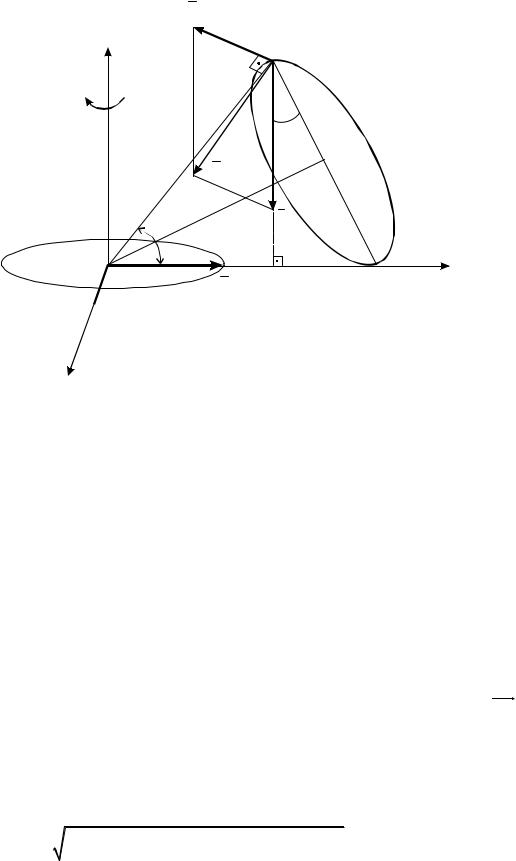
Теперь найдем скорость точки В. Для этого на рис. 4.1 проведем из точки В перпендикуляр ВК на мгновенную ось ОР, равный по величине 2 hP .
Тогда скорость точки В определим как её скорость при вращении тела вокруг мгновенной оси:
VB Ω ВК Ω 2hP 2 VC 120 см/c .
Поскольку по условию задачи скорость VC точки С и расстояние hP постоянные по величине, то из (4.1) следует, что величина мгновенной угловой скорости также является постоянной. При качении конуса по
неподвижной плоскости |
ХОY |
конец вектора |
(точка А) описывает |
окружность радиуса . |
Так как |
|
|
VA , тогда его модуль можно найти по |
|||
формуле |
|
|
|
|
ε VA ωZ Ω, |
(4.2) |
|
где ωZ – угловая скорость вращения конуса вокруг оси OZ.
Для определения ωZ проведем из точки С на ось ОZ перпендикуляр hZ (рис. 4.1), где
hZ OC cosα r ctgα cosα 30 см.
Тогда
ωZ VC 2 c 1, hZ
и из (4.2) находим
ε ωZ Ω 6,92 c 2 .
Изобразим на рис. 4.2 вектор углового ускорения ε конуса выходящим из точки О параллельно вектору VA , т. е. в данный момент времени ось углового ускорения ОЕ, по которой направлен вектор ε, совпадает с осью ОХ.
аBP
Z |
B |
|
|
|
|
Z |
|
|
|
|
C |
|
аB |
|
|
|
|
|
аОС |
r |
|
|
|
O |
2 A |
Y |
|
K |
L P |

X E
Рис. 4.2
Для определения ускорения точки В конуса воспользуемся теоремой Ревальса:
aB aOC aBP ,
где
aOC 2 BK 2 2hP 415,7 см/с2. aBP ε hE ε BO ε 2r 277,1 см/с2.
На рис. 4.2 вектор осестремительного ускорения аОС направим из точки В по BK к мгновенной оси вращения ОР. Вектор вращательного ускорения aBP
проведем перпендикулярно плоскости, проходящей через векторы ε и ОВ. Вектор ускорения aB точки В изобразим диагональю параллелограмма,
построенного на векторах аОС и aBP как на сторонах, модуль которого вычислим по формуле:
a |
B |
|
a2 |
a2 |
2 a |
BP |
a |
cos |
|
90o α |
|
366 см/c2 |
. |
|
|
BP |
OC |
|
OC |
|
|
|
По теме 4 «Движение тела вокруг неподвижной точки» рекомендуется решить следующие задачи из сборника [1]: 19.1; 19.3; 19.5; 19.9.
5. ТЕМА 6 СОСТАВНОЕ (СЛОЖНОЕ) ДВИЖЕНИЕ ТОЧКИ И ТЕЛА
На практических занятиях по теме «Сложное движение точки и тела» решаются задачи по установлению соотношений между кинематическими характеристиками относительного, переносного и абсолютного движений точки и твердого тела.
5.1.Задачи на сложное движение точки
I.Если точка совершает сложное движение и составляющие движения,
вкоторых она одновременно участвует, заданы, то для определения кинематических характеристик её абсолютного движения следует придерживаться следующего порядка:
1)ввести две системы координат: неподвижную и подвижную, связанную с телом, относительно которого движется точка;
2)разложить движение точки на составляющие и определить её траектории в относительном, переносном и абсолютном движениях;
3)мысленно остановив переносное движение, найти положение точки в заданный момент времени на траектории относительного движения и определить её скорость и ускорение в относительном движении;
4)мысленно остановив относительное движение, по угловой скорости
иугловому ускорению переносного движения определить скорость и ускорение точки в переносном движении в заданный момент времени;
5)применив теорему о сложении скоростей, определить абсолютную скорость точки;
6)вычислить модуль ускорения Кориолиса и найти его направление, воспользовавшись правилом Н. Е. Жуковского;
7)найти проекции абсолютного ускорения точки на оси неподвижной системы отсчета и по ним определить искомое абсолютное ускорение точки по модулю и направлению.
II.Для определения одной из скоростей точки при сложном движении с помощью теоремы о сложении скоростей, если известны направления её абсолютной, относительной и переносной скоростей и модуль одной из этих скоростей, следует придерживаться следующего порядка:
1)ввести две системы координат: неподвижную и подвижную, связанную с телом, относительно которого движется точка;
2)разложить движение точки на составляющие и определить её траектории в относительном, переносном и абсолютном движениях;
3)воспользовавшись теоремой о сложении скоростей, построить в этой точке треугольник скоростей: построение следует начинать с вектора скорости, известной по модулю и направлению; затем через его конец и начало провести прямые, параллельные соответственно двум другим

векторам до их пересечения; при обходе полученного треугольника скоростей векторы, определяющие направления относительной и переносной скоростей, изображаются в одном направлении, а вектор абсолютной скорости – в противоположном;
4) найти модули неизвестных по величине скоростей, определив длины сторон в построенном треугольнике скоростей.
Пример 5.1. Пластина АВС равномерно вращается вокруг оси ОZ с угловой скоростью ωе (рис. 5.1). По её стороне АС движется точка М
согласно уравнению s =s(t)=АМ(t). Определить абсолютную скорость и абсолютное ускорение точки М в момент времени t1.
Решить задачу при следующих данных:
ωе 10 с-1, s = АМ = 4t3 м, t1 = 0,5 c.
Решение. Точка М совершает сложное движение, поскольку она одновременно участвует в двух движениях.
Свяжем с осью вращения ОZ неподвижную систему координат ОXYZ, предполагая, что пластина АВС в рассматриваемый момент времени t1 находится в плоскости YОZ (рис. 5.1). Подвижную систему отсчета Axyz (на рис. 5.1 не изображена) мысленно свяжем с пластиной АВС, относительно которой движется точки М.
Тогда движение точки М по стороне АС вращающейся пластины АВС является для неё относительным движением, а вращение вместе с пластиной АВС вокруг неподвижной оси ОZ переносным движением (так как из
данных задачи ωе 0 , то пластина АВС вращается вокруг оси ОZ по часовой
стрелке).
Абсолютная скорость точки М вычисляется по теореме о сложении скоростей:
Va Vе Vr .
Сначала определим кинематические характеристики относительного движения точки. Это движение задано естественным способом и представляет собой прямолинейное движение точки М по стороне АС пластины АВС по
закону s = АМ = |
= 4t3. |
Найдем положение точки М на |
|
траектории |
относительного |
движения в момент времени t1 = 0,5 c. Для этого вычислим расстояние
s1 AM t1 0,5 0,5 м.
Z |
|
|
|
|
e |
|
|
A |
|
|
|
|
s1 |
|
|
K |
Re |
M |
|
|
Ve |
Vr |
|
|
|
|
|
B |
Va |
60o |
C |
O |
|
|
Y |
|
|
|
|
X |
|
|
|
|
|
Рис. 5.1 |
|

Определим относительную скорость точки М и ее численное значение:
Vr dsdt 12 t2 ,
при t1 = 0,5 c Vr = 3 м/с. Поскольку Vr 0, то на рис.5.1 вектор Vr
направим из точки М в сторону увеличения расстояния s = АМ, т. е. из точки М к точке С.
Вычислим величину переносной скорости точки М как скорость точки вращающейся пластины АВС:
Ve ωe Re ωe s1 cos60o 2,5 м/c ,
где Re = MK, т. е. длина перпендикуляра, опущенного из точки М на ось
вращения OZ, другими словами, Re – радиус окружности, которую описывала бы точка М при переносном вращении вместе с пластиной АВС вокруг оси OZ в данный момент времени t1 = 0,5 c.
На рис. 5.1 направим вектор Vе из точки М перпендикулярно отрезку MK в направлении ωе (параллельно оси ОХ).
Геометрически складывая векторы Vr и Vе , определяем вектор
абсолютной скорости Vа точки М. Так как угол между ними α 90о , то модуль абсолютной скорости находим по формуле:
Va Ve2 Vr2 3,9 м/с.
Для определения абсолютного ускорения точки М воспользуемся теоремой Кориолиса о сложении ускорений. Найдем векторы относительного, переносного ускорений и ускорения Кориолиса по модулю и направлению.
Так как относительное движение точки М задано естественным способом, то вектор относительного ускорения ar определяется по теореме Гюйгенса:
ar arτ arn .
Однако, поскольку траекторией этого движения является прямая линия АС
( |
|
= |
|
), то в этом случае величина нормального ускорения |
an V 2 |
/ρ 0 |
|
|
|
r |
r |
|
|||
и ar arτ .
|
Z |
|
|
|
|
|
Поэтому |
|
|
|
|
значение |
|
|
|
|
|
относительного |
ускорения точки М |
||||||||
|
|
e |
|
|
|
||||||||
|
A |
|
|
|
|
вычислим по формуле: |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s1 |
|
|
|
|
τ |
|
dV |
24 t , |
||
|
|
|
|
|
|
|
ar ar |
|
r |
||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
K |
R |
an |
M |
|
|
|
|
|
|
|
2 |
|
|
e |
e |
|
и при t = 0,5 c ar 12 м/с . |
|
||||||||
|
|
|
aC |
ar |
|
|
Так как в данный момент |
||||||
|
|
|
V |
|
времени знаки числовых значений V и |
||||||||
|
|
|
|
r |
|
ar |
|
|
|
|
|
|
r |
|
|
|
|
60o |
|
одинаковые, |
то |
относительное |
|||||
|
B |
k j |
|
C |
движение точки ускоренное, и на рис. |
||||||||
|
O |
|
|
Y |
5.2 |
вектор относительного ускорения |
|||||||
X |
i |
e |
|
|
|
ar |
направим |
так |
|
же |
как |
вектор |
|
|
|
|
|
относительной скорости Vr , т. е. из |
|||||||||
|
|
|
|
|
|||||||||
|
|
|
Рис. 5.2 |
|
точки М к точке С. |
|
|
|
|
|
|||
|
|
|
|
|
Переносное ускорение точки М |
||||||||
|
|
|
|
|
|
|
|||||||
определим как ускорение точки пластины АВС, вращающейся вокруг |
|||||||||||||
неподвижной оси OZ: |
|
|
|
|
|
|
|
|
|
||||
r rn |
r τ |
, |
ae ae |
ae |
где
ane ω2e Re 25 м/c2,
aeτ εe Re 0,
так как по условию задачи переносное движение равномерное вращение (ωe const ) и εe dωe / dt = 0. Следовательно, переносное ускорение точки М
r rn |
, и на рис. 5.2 этот вектор |
равно нормальному переносному ускорению ae ae |
направим из точки М по отрезку MK к оси вращения OZ. Вычислим модуль ускорения Кориолиса
|
r |
|
r |
Vr , |
|
|
(5.1) |
|||||||
|
aС 2 ωe |
|
|
|||||||||||
который равен |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
aС 2 |
|
|
|
|
Vr |
|
sinα 30 м/c |
2 |
, |
|
|||
|
|
|
|
|
|
|||||||||
|
|
ωe |
|
|
|
|
|
|||||||
где α 30o угол между векторами ω |
e |
и V . |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
Направление вектора aC найдем |
по правилу Н. Е. |
Жуковского: |
||||||||||||
спроецируем вектор Vr относительной скорости точки М на плоскость ОХY,

перпендикулярную вектору ωe , а затем повернём эту проекцию в этой плоскости на 90о в направлении ωe (по ходу часовой стрелки). На рис. 5.2 изобразим вектор ускорения Кориолиса aC , направив его из точки М
параллельно оси ОХ.
Для определения абсолютного ускорения точки М запишем теорему Кориолиса о сложении ускорений для данной задачи:
aa aen ar aC .
Поскольку направление вектора абсолютного ускорения aa точки М
неизвестно, то в данном равенстве разложим его на составляющие векторы по осям декартовой системы ОХYZ:
rn |
|
r r |
aaX i aaX j aaX k ae |
ar aC . |
|
Здесь i , j, k орты неподвижного трёхгранника |
ОХYZ (рис. 5.2), а aaX , |
|
aaY и aaZ проекции вектора aa на эти оси.
Проецируя полученное векторное равенство на оси ОX, ОY, ОZ и подставляя модули найденных выше векторов ускорений, получаем:
aaX aC 30 м/c2 ;
aaY aen ar cos60o 19 м/c2 ; aaZ ar sin60o 10,4 м/c2 .
Тогда модуль абсолютного ускорения точки М найдем по формуле:
aa aaX2 aaY2 aaZ2 302 ( 19)2 ( 10,4)2 37 м/c2 .
Следовательно, при t = 0,5 c модуль абсолютной скорости точки М равен Va 3,9 м/c , а величина её абсолютного ускорения aa 37 м/c2 .
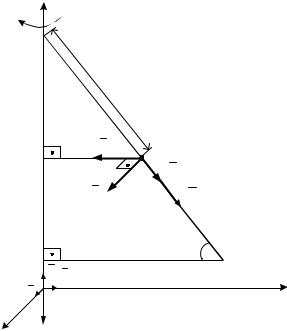
Пример 5.2. В кулисном механизме при вращении кривошипа ОL вокруг оси О, перпендикулярной плоскости рисунка, ползун А, перемещаясь вдоль кривошипа ОL, приводит в движение стержень АВ, движущийся в вертикальных направляющих K (рис. 5.3).
Определить абсолютную скорость Vа точки А в функции от угловой скорости ωи угла поворота кривошипа ОL, если OK = d.
|
Решение. Точка А ползуна совершает сложное движение, поскольку |
||||||||||||
она одновременно участвует в двух движениях. |
|
|
|||||||||||
|
Свяжем с точкой О и направляющими K неподвижную систему |
||||||||||||
координат OXY (рис. 5.3) . Тогда движение точки А вместе с поступательно |
|||||||||||||
движущимся в вертикальных направляющих K стержнем АВ является для неё |
|||||||||||||
абсолютным движением и поэтому вектор V |
абсолютной скорости точки А |
||||||||||||
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
направлен вдоль направляющих по вертикали (параллельно оси OY). |
|
||||||||||||
|
Подвижную систему отсчета Оху мысленно свяжем с вращающимся |
||||||||||||
кривошипом ОL, по которому движется ползун А (на рис. 5.3 не изображена). |
|||||||||||||
Тогда скорость той точки вращающегося кривошипа ОL, с которой в данном |
|||||||||||||
положении механизма совпадает точка А, является для неё переносной |
|||||||||||||
скоростью Vе . Поэтому вектор Vе |
направлен из точки А перпендикулярно |
||||||||||||
кривошипу ОL в направлении его вращения с угловой скоростью . |
|||||||||||||
Определим модуль переносной скорости точки А: |
|
|
|||||||||||
|
|
V ω OA ω |
|
d |
|
|
|
|
|
|
|||
|
|
e |
|
|
|
cos . |
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
Движение |
точки |
|
А |
вместе |
с |
r |
|
|
||||
|
|
φ |
Va |
L |
|||||||||
поступательно |
движущимся |
|
по |
|
|||||||||
|
|
Ve |
A |
|
|||||||||
кривошипу ОL ползуном является для |
|
|
|
||||||||||
неё |
относительным |
движением |
|
со |
|
|
|
|
|||||
скоростью Vr , направленной вдоль |
|
|
|
||||||||||
|
|
|
|
||||||||||
кривошипа из точки А к точке L. |
|
|
O |
φ |
K X |
|
|||||||
|
Для |
определения |
|
|
величины |
|
|
|
|
||||
абсолютной скорости Vа точки А |
|
|
|
|
|||||||||
воспользуемся |
теоремой |
|
о |
сложении |
|
d |
B |
|
|||||
скоростей: |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Va |
Vе Vr . |
|
|
|
|
|
|
Рис. 5.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для этого построим в точке А векторный треугольник скоростей. |
|
||||||||||||
|
На рис. 5.3 построение начинаем из точки А с известного по модулю и |
||||||||||||
направлению вектора переносной скорости Vе . Через его конец и начало |
|||||||||||||
проводим прямые, параллельные соответственно векторам Vr |
и Vа . Вектор, |
||||||||||||
проведенный из точки А в точку пересечения этих прямых, является |
|||||||||||||
абсолютной скоростью точки А. |
|
|
|
|
|
|
|||||||
|
Полученный треугольник скоростей прямоугольный, так как Vе Vr . |
||||||||||||
Угол между векторами Vе |
и Va |
равен |
, |
как острые углы с взаимно |
|||||||||
перпендикулярными сторонами (Vе |
OA , |
а |
Va OK ). Определим модуль |
||||||||||

абсолютной скорости Va |
точки А как гипотенузу данного прямоугольного |
|||||||||||||
треугольника по известной величине катета Vе и углу : |
|
|
|
|||||||||||
|
|
|
|
|
V |
Ve |
|
|
ωd |
, |
|
|
|
|
|
|
|
|
|
a |
cos |
|
cos2 |
|
|
|
|||
что и требовалось найти. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
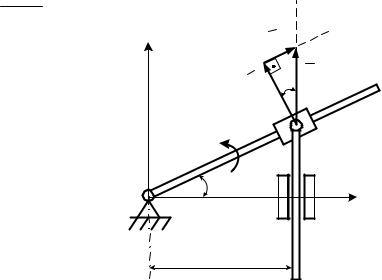
Пример 5.3. На тележке, движущейся по горизонтали вправо с |
||||||||||||
ускорением a0 , установлен электрический мотор, ротор которого при пуске в |
||||||||||||||
ход вращается по закону = (t). |
|
|
|
|
|
|
|
|
||||||
|
|
Определить абсолютное ускорение точки А, лежащей на ободе ротора |
||||||||||||
радиуса R, при t1, если в этот момент времени точка А находится в |
||||||||||||||
положении, указанном на рис. 5.4. |
|
|
|
|
|
|
|
|
||||||
|
|
Решить задачу при следующих данных: |
|
|
|
|
||||||||
|
|
а0 = 49,3 см/с2, = (t) = t2 рад, t1 = 1 c, СА = R = 20 см. |
|
|
|
|||||||||
|
|
Решение. Свяжем с плоскостью, по которой движется тележка, |
||||||||||||
неподвижную систему координат ОXY, направив ось ОХ по направлению ее |
||||||||||||||
движения, а с самой тележкой подвижную систему координат (на рис. 5.4 |
||||||||||||||
не изображена). |
|
|
|
|
|
|
|
|
Точка |
А |
совершает |
|||
|
|
|
|
|
|
|
|
|
|
|
||||
Y |
|
|
|
|
|
|
|
|
сложное движение, поскольку |
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
она одновременно участвует в |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
двух движениях: в переносном |
|||||
|
|
|
|
ar |
|
|
|
|
движении вместе |
с тележкой |
||||
|
|
|
|
|
|
|
|
|||||||
|
|
C |
30o |
|
ae |
|
|
|
|
по |
горизонтали |
вправо |
с |
|
|
|
|
n |
|
|
|
|
|
ускорением |
a0 |
и |
в |
||
|
|
|
ar |
A |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
относительном |
вращении |
с |
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
a0 |
|
|
|
ротором вокруг оси С. |
|
|||
O |
j |
i |
|
|
|
|
X |
|
|
|
Для |
|
определения |
|
|
|
|
|
|
|
|
абсолютного ускорения точки |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Рис. 5.4 |
|
|
|
|
|
|
воспользуемся |
|
теоремой |
|||
|
|
|
|
|
|
|
|
Кориолиса |
о |
сложении |
||||
ускорений |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
aa aе ar aC . |
|
|
|
|||||
|
|
Изобразим на рис. 5.4 в точке А уже известный по модулю вектор |
||||||||||||
|
|
|
|
r |
r |
|
|
|
2 |
, направленный параллельно оси |
||||
переносного ускорения ae |
a0 49,3 см/c |
|
||||||||||||
ОХ. Найдем относительное ускорение точки А как ускорение точки |
||||||||||||||
вращающегося ротора: |
|
|
|
|
|
|
|
|
|
|
|
|||
r rn |
r τ |
ar ar |
ar . |
Для этого вычислим угловую скорость и угловое ускорение ротора при t1 = 1 c:
ω |
d |
2t |
|
t 1 2 c 1 , |
ε |
dω |
2 c 2 . |
|
|||||||
dt |
|
dt |
|||||
|
|
|
|
|
|
Поскольку знаки угловой скорости и углового ускорения ротора оба положительные и угловое ускорение от времени не зависит, то ротор вращается равноускоренно против хода часовой стрелки (рис. 5.4).
Тогда величины нормального и касательного ускорений точки А в относительном движении равны:
arn ω2 R 80 см/c2, arτ ε R 40 см/c2.
|
rn |
направим из точки А по радиусу к оси С |
||||
Вектор нормального ускорения ar |
||||||
вращения |
ротора. Касательное |
ускорение |
rτ |
изобразим |
в |
точке А |
ar |
||||||
|
|
rn |
в направлении . |
|
|
|
перпендикулярно нормальному ускорению ar |
|
|
||||
Так |
как переносное движение поступательное (ωe 0), |
то |
из (5.1) |
|||
следует, что ускорение Кориолиса равно нулю (aС 0 ). Тогда в этом случае теорема Кориолиса принимает вид
r r r aa ae ar ,
или, поскольку относительное движение является вращательным,
r r rn |
r τ |
aa ae ar |
ar . |
Так как направление вектора абсолютного ускорения aa точки А
неизвестно, то в данном равенстве для плоского случая, разложим этот вектор на составляющие по осям ОХ и ОY:
aaX i aaX j |
rn |
r r |
(5.2) |
ae |
ar aC , |
||
где i , j орты неподвижной декартовой системы координат ОХY, а |
aaX , |
||
aaY проекции вектора абсолютного ускорения aa на эти оси.
Для определения величины абсолютного ускорения точки А спроецируем векторное равенство (5.2) на оси неподвижной системы