

3. Разомкнутая и замкнутая структура измерительных устройств для датчиков
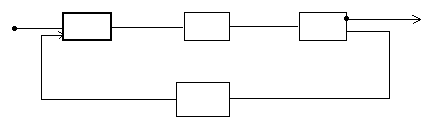
В рассмотренных двух примерах включения моста (резистивного и емкостного) использованы различные структуры измерительных устройств. В датчике на основе терморезистора применена так называемая разомкнутая структура измерительного устройства (приборы с такой структурой иногда называют приборами сопоставления). В таких устройствах все преобразования от входной измеряемой величины Х до выходной W (которая как-то используется, например, кодируется для передачи, запоминается или подается на индикатор) имеют одно направление - от входа к выходу. Здесь нет обратной связи с выхода на вход, и схема содержит последовательно включенные линейные звенья (рис. 10), причем .
 W
W
K1K2K3G
x
Рис. 10. Разомкнутая структура измерительной системы
Ясно, что в такой системе стабильность, точность и чувствительность напрямую зависят от стабильности, точности и величины коэффициента передачи составляющих звеньев.
В частности, погрешность преобразования можно характеризовать средним квадратичным отклонением, которое через погрешности отдельных звеньев цепи определится известной формулой квадратичного суммирования случайных величин
![]()
Более сложными и более совершенными являются измерительные устройства с замкнутой структурой. В них используется компенсационный принцип измерения и их правомерно рассматривать как частный случай систем автоматического управления (САУ). В частности, примером такой системы является рассмотренный ранее емкостной датчик перемещения.
В достаточно общем виде структура такой системе представлена на рис. 11.
X 1 Y =K1(X-X0) 2 Z=K2Y 3 W=K3Z
X0
X0=KобрW 4 W
Рис.11. Замкнутая структура измерительной системы.
Устройство содержит две цепи: прямого преобразования (блоки 1 , 2 и 3, их может быть и больше) и цепь обратной связи (на рис. блок 4). Измеряемая величина Х подается на вход первого блока 1. Его называют часто устройством сравнения, решающим преобразователем или сумматором. В нем происходит сравнение входной величины Х с однородной ей по природе величиной Хо , поступающей из цепи обратной связи (блок 4) и строго пропорциональной выходной величине W.
В результате сравнения вырабатывается сигнал некомпенсации (разбаланса, раскомпенсации) величин Х и Хо, т.е.
Y=К1(Х-Хо). (1)
Этот сигнал усиливается и преобразуется в блоках 2 , 3 цепи прямого преобразования, так что
W=K2K3Y=K1K2K3(X-X0)=Kпр(X-X0),
где Кпр = К1К2К3 - коэффициент передачи преобразования цепи прямого преобразования.
Цепь обратного преобразования , которая также может быть сложной , представлена блоком 4. На его входе имеем сигнал W на выходе
Х0=КобрW . (2)
Совместное решение (1) и (2) дает
W=(Кпр/(1+КпрКобр))Х = КХ, (3)
где К-общий коэффициент сложного преобразования устройства с обратной связью.
Из (3) видно, что К < Кпр.
Нетрудно убедиться, что такая система отслеживает (в другом масштабе и может быть в другой физической форме) измеряемое значение Х. Действительно, при расхождении Х и Х0, возникающее рассогласование (Х-Х0) усиливается, и выходной сигнал W изменяется до тех пор, пока пропорциональный ему Х0 не сравняется с измеряемой входной величиной Х. Таким образом, в равновесии всегда Х=Х0, а W=Х0/Кобр, т.е. при Кобр=const величина W несет информацию о значении Х0, а следовательно и Х.
Чтобы понять для чего нужен такой подход при проведении измерений, проанализируем погрешность системы. Из (3) видно, что погрешность выходного сигнала W определяется погрешностью коэффициента сложного преобразования
К=Кпр/(1+Кпр Кобр), (4)
т.е. в конце концов погрешностями Кпр и Кобр . Установим связь между этими погрешностями. В начале найдем полный дифференциал выражения (4):
dK=((1+КпрКобр)dK-Кпр Кобр dКпр-К²пр dКобр)/(1+Кпр Кобр)²
Переходя к малым конечным приращениям , получим
∆К=∆Кпр/(1+Кпр Кобр)²-К²пр ∆Кобр/(1+Кпр Кобр)² (5)
Для перехода к относительным погрешностям поделим обе части выражения (5) почленно на (4) и получим
∆К/К=(1/(1+Кпр Кобр)) (∆Кпр/Кпр)-Кпр Кобр/((1+Кпр Кобр)) (∆Кобр/Кобр) (6)
Поскольку в подавляющем числе случаев КпрКобр>>1, последнее выражение можно записать в виде
∆К/К=((1/Кпр Кобр)) (∆Кпр/Кпр)-(∆Кобр/Кобр)=-∆Кобр/Кобр. (7)
Это значит, что относительная погрешность сложного преобразования в замкнутом измерительном контуре с отрицательной обратной связью, в которой Кпр Кобр>>1, практически не зависит от погрешности передачи в прямой ветви контура и определяется, в основном, погрешностью цепи обратной связи.
Формула (6) справедлива как для систематических, так и для случайных погрешностей.
В последнем случае вместо конечных приращений нужно воспользоваться среднеквадратичным отклонением σ и суммировать погрешности квадратично, т.е.:

Поскольку, как отмечалось, влияние погрешности (в том числе относительной и достаточной большой) прямой ветви преобразования невелико в силу того, что КпрКобр>>1. Общая относительная погрешность измерений будет определяться качеством цепи обратной связи, которую можно выполнить достаточно точной и стабильной, т.е.
σ (∆К/К)= σ(∆Кобр/Кобр).
Практически это позволяет создавать точные и надежно работающие датчики с использованием простых и дешевых схем транзисторных усилителей в цепи прямого преобразования.
Рассмотренный способ построения замкнутой системы измерений является частным случаем следящей системы или системы автоматического регулирования. Такие системы воспроизводят на выходе (с определенной точностью) входное задающее воздействие, которое изменяется во времени по заранее неизвестному закону. Большое значение имеют динамические свойства таких систем, тесно связанные с их устойчивостью.