

1.13. Характеристики импульсных систем, описываемых уравнениями в пространстве состояний
Если
в первом уравнении (1.80), которое является
неоднородным разностным уравнением
считать матрицу
![]() нулевой, то получим однородное разностное
уравнение
нулевой, то получим однородное разностное
уравнение
![]() , (1.91)
, (1.91)
в
котором, полагая заданным начальное
состояние вектора
![]() при
при![]() ,
получим
,
получим![]() ,
,![]() ,
и т.д. Таким образом, общее решение
уравнения (1.91) можно записать в виде
,
и т.д. Таким образом, общее решение
уравнения (1.91) можно записать в виде
![]() . (1.92)
. (1.92)
Матрица
![]() носит название переходной матрицы
состояния линейной импульсной системы.
Вычисление
носит название переходной матрицы
состояния линейной импульсной системы.
Вычисление![]() по известной матрице
по известной матрице![]() всегда возможно. Наиболее просто найти
всегда возможно. Наиболее просто найти![]() ,
если матрица
,
если матрица![]() диагональная. Если
диагональная. Если![]() ,
то
,
то![]() .
.
Если
найдена
![]() ,
то в импульсной системе, описываемой
уравнениями(1.80),
можно вычислить выход
,
то в импульсной системе, описываемой
уравнениями(1.80),
можно вычислить выход
![]() при заданном входе
при заданном входе![]() по выражению
по выражению
 . (1.93)
. (1.93)
В (1.93) первое слагаемое − свободная составляющая, а второе − вынужденная.
Применим
к уравнениям (1.80)
![]() -преобразование,
полагая, что начальные значения вектора
состояния
-преобразование,
полагая, что начальные значения вектора
состояния![]() нулевые. Получим
нулевые. Получим![]() ,
,![]() ,
где
,
где![]() ,
,![]() ,
,![]() − изображения
соответствующих векторов
− изображения
соответствующих векторов
![]() ,
,![]() ,
,![]() .
.
Из полученного уравнения найдем
![]() , (1.94)
, (1.94)
где
![]() − обратная
матрица к матрице
− обратная
матрица к матрице![]() ,
,![]() − единичная
− единичная![]() матрица.
матрица.
Матрица
![]() размерности
размерности![]() носит названиепередаточной
матрицы
(матрицы
передаточных функций)
импульсной системы. Ее элементы
носит названиепередаточной
матрицы
(матрицы
передаточных функций)
импульсной системы. Ее элементы
![]() являются обычными скалярными функциями,
связывающими
являются обычными скалярными функциями,
связывающими![]() вход
вход![]() с
с![]() выходом
выходом![]() .
Если
.
Если![]() ,
,![]() − скалярные
величины, то
− скалярные
величины, то![]() − обычная
скалярная передаточная функция.
− обычная
скалярная передаточная функция.
Матрицу
![]() будем называтьвесовой
матрицей.
Очевидна связь
будем называтьвесовой
матрицей.
Очевидна связь
![]() ,
,![]() .
.
Отметим
один из способов определения переходной
матрицы состояния
![]() с помощью
с помощью![]() -преобразования
-преобразования
![]() .
.
Введем еще одну из важнейших характеристик импульсной системы, заданной уравнениями состояния (1.80), – характеристическое уравнение импульсной системы
![]() , (1.95)
, (1.95)
где
![]() означает определитель матрицы
означает определитель матрицы![]() .
Если матрица
.
Если матрица![]() размерности
размерности![]() ,
то (1.95) − это алгебраическое
уравнение
,
то (1.95) − это алгебраическое
уравнение![]() -ой
степени.
-ой
степени.
Линейная
импульсная система, описываемая
уравнениями состояния (1.80), будет
устойчива, если все корни
![]() уравнения (1.95) по модулю меньше единицы,
т.е.
уравнения (1.95) по модулю меньше единицы,
т.е.![]() ,
,![]() .
Для выяснения этого факта можно,
например, использовать алгебраический
критерий устойчивости импульсных
систем, изложенный в подразделе 1.7.
.
Для выяснения этого факта можно,
например, использовать алгебраический
критерий устойчивости импульсных
систем, изложенный в подразделе 1.7.
Для
импульсных систем, описываемых
уравнениями (1.80), можно ввести и другие
понятия, аналогичные понятиям для
непрерывных систем [1], такие как
наблюдаемость и управляемость.
Управляемость и наблюдаемость зависят
от вида матриц
![]() ,
,![]() ,
,![]() в (1.80). Определения и методы оценки
управляемости и наблюдаемости идентичны
[1] и здесь не приводятся.
в (1.80). Определения и методы оценки
управляемости и наблюдаемости идентичны
[1] и здесь не приводятся.
Пример
1.13. Найдем передаточную функцию
разомкнутой импульсной системы из
примера 1.12, используя полученные
уравнения состояния (1.90). В соответствии
с (1.94)
![]() .
Найдем матрицу
.
Найдем матрицу![]() .
Очевидно,
.
Очевидно,
 .
.
С
учетом матриц
![]() и
и![]() из (1.90) имеем
из (1.90) имеем
 ,
,
где
![]() ,
,![]() ,
,![]() ,
,![]() .
.
Этот результат совпадает с результатом, полученным в примере 1.2.
1.14. Цифровые системы автоматического управления
Цифровой САУ можно назвать такую, в состав которой включено цифровое вычислительное устройство (ЦВУ) в виде отдельных схем на базе элементов цифровой логики, микропроцессоров, микроконтроллеров и в наиболее сложных случаях в виде специализированных управляющих вычислительных машин (комплексов).
При классификации САУ по виду математических моделей под цифровой САУ будем понимать такую, в которой хотя бы один из сигналов в контуре управления подвергается одновременной дискретизации (квантованию) по уровню и времени. С этой точки зрения цифровая САУ является подклассом дискретных систем.
На ЦВУ возлагаются следующие основные функции: формирование программы управления (для систем стабилизации, позиционирования и программного управления), реализация цифровых алгоритмов управления и реализация дискретной коррекции. Кроме этого ЦВУ можно применять и для выполнения других функций: контроля элементов и состояния всей системы в целом, некоторых сервисных функций (учет времени работы и т.п.).
Цифровая
САУ содержит две части: ЦВУ и непрерывную
часть, включающую объект управления,
исполнительное устройство,
усилительно-преобразовательные и
корректирующие устройства, датчики и
т.п. Будем считать непрерывную часть
линейной, описываемой передаточной
функцией
![]() .
Тогда базовая структура рассматриваемой
системы будет иметь следующий вид:
.
Тогда базовая структура рассматриваемой
системы будет иметь следующий вид:
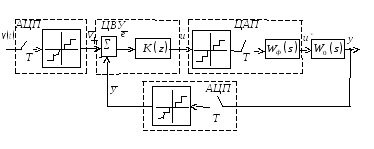
Рис. 1.10
На
рис. 1.10 АЦП – аналого-цифровой
преобразователь; ЦАП – цифро-аналоговый
преобразователь; Т – период замыкания
идеальных импульсных элементов (ключей);
![]() ,
,![]() ,
,![]() ,
,![]() – сигналы, представленные в цифровой
форме;
– сигналы, представленные в цифровой
форме;![]() ,
,![]() – непрерывные сигналы;
– непрерывные сигналы;![]() – последовательность прямоугольных
модулированных по амплитуде импульсов;
– последовательность прямоугольных
модулированных по амплитуде импульсов;![]() – передаточная функция формирующего
устройства;
– передаточная функция формирующего
устройства;![]() – математическая модель, отражающая
алгоритм функционирования ЦВУ.
– математическая модель, отражающая
алгоритм функционирования ЦВУ.
АЦП
и ЦАП на рис. 1.10 выделены в самостоятельные
функциональные блоки, хотя на практике
они могут непосредственно являться
узлами ЦВУ. Каждый из них представлен
в виде идеального квантователя и
нелинейной статической характеристики,
характеризующий процесс. Период
замыкания ключей везде одинаковый и
равен
![]() (обычно задается ЦВУ). ЦВУ осуществляет
операцию сравнения двух сигналов в
цифровой форме
(обычно задается ЦВУ). ЦВУ осуществляет
операцию сравнения двух сигналов в
цифровой форме![]() и преобразование их по определенному
алгоритму в соответствии с выражением
и преобразование их по определенному
алгоритму в соответствии с выражением![]() в цифровое значение
в цифровое значение![]() ,
которое преобразуется в сигнал
,
которое преобразуется в сигнал![]() .
.
Рассмотрим
особенности процессов квантования по
времени и уровню в цифровой САУ. Пусть
оба ключа АЦП замыкаются в момент
времени
![]() и изменяют значения
и изменяют значения![]() и
и![]() .
Далее требуется определенное время на
преобразование этих значений в цифровую
форму
.
Далее требуется определенное время на
преобразование этих значений в цифровую
форму![]() ,
,![]() ,
определение разности
,
определение разности![]() ,
преобразование
,
преобразование![]() в
в![]() и, наконец, преобразование
и, наконец, преобразование![]() в аналоговое (постоянное) значение
в аналоговое (постоянное) значение![]() .
Обозначим это время через
.
Обозначим это время через![]() .
Таким образом, постоянное значение на
выходе ЦАП по отношению к моменту съема
информации АЦП появляется с задержкой
на время
.
Таким образом, постоянное значение на
выходе ЦАП по отношению к моменту съема
информации АЦП появляется с задержкой
на время![]() .
Обычно формирующее устройство является
фиксатором нулевого порядка, т.е.
постоянное значение сигнала
.
Обычно формирующее устройство является
фиксатором нулевого порядка, т.е.
постоянное значение сигнала![]() держится до момента следующего замыкания
ключа. Очевидно, период замыкания
держится до момента следующего замыкания
ключа. Очевидно, период замыкания![]() не может быть меньше
не может быть меньше![]() ,
т.е. всегда выполняются условие
,
т.е. всегда выполняются условие![]() .
.
Итак,
из рассмотренного следует, что ключ
ЦАП замыкается с задержкой на время
![]() по отношению к моментам
по отношению к моментам![]() замыкания ключей АЦП.
замыкания ключей АЦП.
Время
![]() зависит
от быстродействия АЦП, ЦАП и ЦВУ и
длительности (сложности) отработки
программы преобразования
зависит
от быстродействия АЦП, ЦАП и ЦВУ и
длительности (сложности) отработки
программы преобразования![]() в
в![]() .
Быстродействие современных вычислительных
средств достаточно велико и непрерывно
повышается, а алгоритмы обработки
информации в ЦВУ обычно простые. В силу
этого время
.
Быстродействие современных вычислительных
средств достаточно велико и непрерывно
повышается, а алгоритмы обработки
информации в ЦВУ обычно простые. В силу
этого время![]() достаточно малое.
достаточно малое.
В
процессе квантования по уровню весь
диапазон изменения аналоговой величины,
например![]() ,
разбивается на
,
разбивается на![]() равных частей (квантов), тогда величина
равных частей (квантов), тогда величина

определяет разрешающую способность АЦП.
Каждому
кванту из
![]() интервалов присваивается определенное
число (двоичный код). Для однозначности
такого присвоения (кодирования) должно
выполняться условие
интервалов присваивается определенное
число (двоичный код). Для однозначности
такого присвоения (кодирования) должно
выполняться условие
![]() ,
,
где
![]() – число двоичных разрядов без учета
знакового разряда. В АЦП обычно число
разрядов велико (от 8÷32 и более) и величина
– число двоичных разрядов без учета
знакового разряда. В АЦП обычно число
разрядов велико (от 8÷32 и более) и величина![]() также большая, т.е. число ступеней
нелинейной характеристики большое.
Например, если
также большая, т.е. число ступеней
нелинейной характеристики большое.
Например, если![]() ,
то
,
то![]() и при
и при![]() величина
величина![]() .
.
При
условии
![]() нелинейную характеристику АЦП заменяют
линейной с коэффициентом передачи
нелинейную характеристику АЦП заменяют
линейной с коэффициентом передачи![]() ,
т.е.
,
т.е.![]() .
.
ЦАП
с числом разрядов
![]() имеет на выходе число уровней напряжения,
равное
имеет на выходе число уровней напряжения,
равное
![]() ,
,
а
величина
 .
При большом числе
.
При большом числе![]() ступенчатую характеристику заменяют
на линейную с коэффициентом передачи
ступенчатую характеристику заменяют
на линейную с коэффициентом передачи
![]() .
.
Считая, что ЦВУ реализует линейный алгоритм, т.е. является линейной, исходную структуру можно преобразовать к виду, изображенному на рис. 1.11.

Рис. 1.11
На
этом рисунке
![]() ,
где учитывают коэффициенты передачи
АЦП и ЦАП, а множитель
,
где учитывают коэффициенты передачи
АЦП и ЦАП, а множитель![]() время запаздывания, необходимое на
обработку информации в цифровых
элементах.
время запаздывания, необходимое на
обработку информации в цифровых
элементах.
Считаем
![]() малой величиной, тогда
малой величиной, тогда![]() а
а ![]() при идентичных характеристиках АЦП и
ЦАП. В дальнейшем можно полагать
при идентичных характеристиках АЦП и
ЦАП. В дальнейшем можно полагать
![]() .
.