

3.4 Микропроцессорная система числовой кодовой автоматической блокировки – аб-чку
Рассмотренные выше системы АБ разработаны с учётом использования электромагнитных реле и полупроводниковых элементов. Это ограничивает функциональные возможности и надёжность работы систем, что не в полной мере удовлетворяет возросшим требованиям, предъявляемым к современным системам ИРДП.
Дальнейшее совершенствование систем АБ тесно связано с переходом на микроэлектронную, в том числе и микропроцессорную, элементную базу.
Первым шагом в этом направлении является разработка нескольких систем АБ, таких как кодовая электронная блокировка КЭБ-1, КЭБ-2, АБ-ЧКЕ, АБ-Е1 и АБ-Е2. Реализация аппаратуры сигнальных установок этих систем осуществлена как в микроэлектронной, так и в микропроцессорной технике.
На участках железных дорог Украины произведены испытания микропроцессорной АБ-ЧКУ. Основным элементом этой системы является микропроцессорный путевой приёмник (МПП). Он содержит следующие функциональные узлы КАБ: дешифратор, кодовый путевой трансмиттер, трансмиттерное реле и импульсное путевое реле. МПП может применяться на участках с любым видом тяги при колебаниях температуры окружающей среды от минус 45 до 65°С и относительной влажности воздуха до 95%. Расчётное среднее время наработки на отказ не менее 40 тыс. часов.
Структурно МПП состоит из двух каналов, каждый из которых содержит два микропроцессорных узла. Нормально оба канала находятся в рабочем состоянии, но при этом один является ведущим, а второй – ведомым.
Ведущий канал через узлы выбора и перезапуска подключен к рельсовой линии блок-участка и выполняет технологический алгоритм обработки информации. После декодирования принятого кодового сигнала возбуждаются соответствующие сигнальные реле и включаются лампы на проходном светофоре. С целью повышения помехозащищённости возбуждение сигнальных реле осуществляется при условии одинакового приёма не менее трёх кодовых циклов. Обесточивание сигнальных реле происходит сразу после скачкообразного уменьшения амплитуды кодового сигнала в РЦ от воздействия поездного шунта.
В процессе функционирования ведущего канала на его процессоры подаются тестовые сигналы. При рассогласовании в работе процессоров ведущего канала происходит их перезапуск для восстановления синхронности работы. При этом информация о предотказном состоянии микропроцессорного приёмника по каналам диспетчерского контроля передаётся обслуживающему персоналу.
В МПП реализован метод приёма кодовых сигналов от РЦ в целом. Для этого в ПЗУ декодера хранятся эталонные кодовые комбинации числовой кодовой АБ. В процессе декодирования осуществляется сравнение применяемогокода с контрольным. Для идентификации кодовой комбинации принятые и эталонные временные различия импульсов, а также интервалов не должныпревышать 0,05 с. С целью повышения помехозащищенности при дешифрации кодовых комбинаций Ж и З срабатывание сигнальных реле Ж или ЖЗ происходит при условии одинаковогоприёма не менее трех кодовых циклов.
Для удобства обслуживания аппаратуры АБ на лицевой панели приёмника установлены световые индикаторы, сигнализирующие об его работе.
Структурная схема аппаратуры сигнальной точки АБ-ЧКУ имеет следующие узлы (рис. 3.11):
микропроцессорный путевой приемник (МПП);
дроссель-трансформаторы (ДТ) питающего и релейного концов
устройства защиты и согласования (УЗС);
сигнальный блок (СБ);
генератор линейных сигналов (ЛГ) системы ДК;
проходной трех- или четырехзначный светофор;
питающий трансформатор (ПТ).
МПП выполняет следующие функции:
контроль состояния рельсовой линии;
прием и расшифровка кодовых сигналов;

Рис. 3.11. Структурная схема сигнальной точки АБ-ЧКУ
формирование сигналов АЛС числового кода;
управление состояниями сигнальных реле Ж, ЖЗ и З;
контроль исправного состояния ламп светофора;
контроль передачи кодовых сигналов и их временных параметров;
сопряжение с устройствами диспетчерского контроля.
МПП имеет два режима работы: трансляции и приемопередачи сигналов. Как транслятор его можно использовать в устройствах АПС и ЭЦ для кодирования РЦ. Режим приемопередачи сигналов осуществляется в том случае, если МПП используется в сигнальной установке проходного светофора.
Процедуры контроля состояния рельсовой линии блок-участка, демодуляции и декодирования поступающего от неё кодового сигнала выполнены на программном уровне.
Полезный сигнал от РЦ обнаруживается методом поиска разладки. Под разладкой понимается скачкообразноеизменение амплитуды кодового сигнала на входе МПП.
Различают положительную и отрицательную разладку. Применительно к контролю состояния РЦ под положительной разладкой понимается скачкообразное увеличение амплитуды кодового сигнала в момент освобождения рельсовой линии подвижным составом. Под отрицательной разладкой – скачкообразное снижение амплитуды сигнала в момент входа подвижного состава на рельсовую линию или при нарушении целостности рельсовых нитей, а также соединителей.
Для
повышения устойчивости работы АБ при
изменении в широких пределах сопротивления
балласта рельсовой линии МПП дополнен
адаптивным алгоритмом обработки
сигналов. Вероятность
ложного срабатывания МПП при пороге
обнаружения
разладки равном 8 и при соотношении
сигнал/помеха равном 3 не превышает
![]() .
.
Структурная схема АБ-ЧКУ имеет следующие функциональные узлы (рис. 3.12): АЦП1, АЦП2 – аналого-цифровые преобразователи; МПК – микропроцессорные контроллеры; СК1 и СК2 – схемы контроля первого и второго каналов; СД – схема диагностики; СКИ – схема коммутации интерфейса; СЗ – схема запуска; Ивх, Ивых – интерфейсы входных и выходных цепей; БКТ1, БКТ2 –
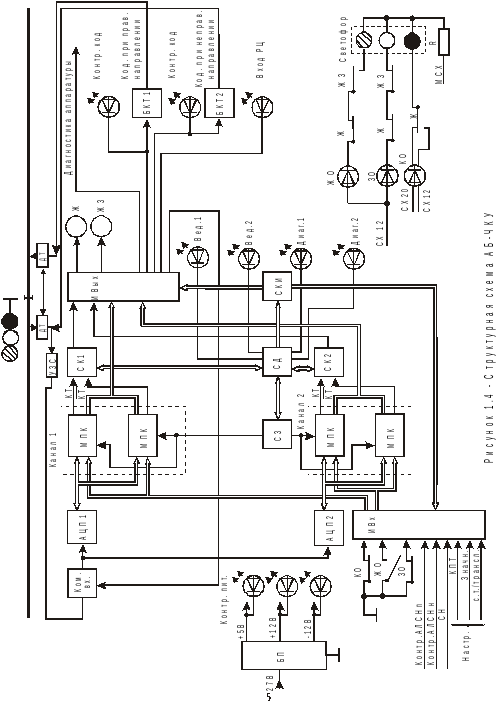

бесконтактные коммутаторы тока; Квх – коммутатор входных цепей; БП – блок питания; Ж, ЖЗ – сигнальные реле; КО, ЖО, ЗО – огневые реле соответственно ламп красного, желтого и зелёного огней; ИС1ИС10 – индикаторные светодиоды.
АБ-ЧКУ функционально и электромагнитно совместима с кодовой АБ и, в отличие от неё, может различать кодовые комбинации желтого и зеленого огней. Это позволяет реализовать четырехзначную сигнализацию проходных светофоров без дополнительных жил кабеля и другой аппаратуры.
Контроль целостности нитей накала ламп проходного светофора осуществляется с помощью огневых реле КО, ЖО, ЗО. Это позволяет на программном уровне осуществлять изменения сигнального показания светофора, сигнального кода АЛСН, передаваемого в смежную РЦ, и перенос красного огня в соответствии с требованиями инструкции по сигнализации.
Интерфейс входа Ивх представляет собой задающий узел. Настроечными перемычками СН или контактами реле Н МПК настраивается на режим работы при движении поездов в правильном или неправильном направлении по одному из путей перегона. При движении поездов в правильном направлении от Ивх подаются контрольные сигналы числового кода на входы МПК первого и второго каналов по шине контроллера АЛСНп, а при неправильном – по шине контроллера АЛСНн.
Одновременно на входы этих же МПК поступают цифровые значения кодового сигнала РЦ от АЦП1 и АЦП2 соответственно первого и второго каналов. С помощью настроечныхперемычек Ивхтакже выбирается значность сигнализации,устанавливается режим работы (транслятора или приемопередатчика)и производится настройка на прием кодовых сигналов с модулятором КПТШ-5 или КПТШ-7.
Инициализация каналов и запуск контроля СК1 и СК2 при первом включении и после перерывов электроснабжения осуществляется схемой запуска СЗ.
Бесконтактный модулятор тока БКТ2 предназначен при работе АБЧКУ при неправильном направлении движения.
В выходном интерфейсе Ивыхпредусмотрены шины для передачи диагностической информации.
При отказе одного из каналов гаснет индикаторный светодиод «Диаг. 1» либо «Диаг. 2». Схема диагностики (СД) обнаруживает неисправный канал и через схему коммутации интерфейса (СКИ) подключает внешние цепи к входам и выходам исправного канала. В зависимости от этого загорается светодиод ведущего канала «Вед.1» либо «Вед. 2».
Программное обеспечение (ПО) АБ-ЧКУ представляет собой две синхронно работающие одинаковые программы, обрабатывающие информацию независимо друг от друга. Каждая программа выполняется в МПК своего комплекта и использует только ей доступную память.
Идентичность выполнения программ в каждом из комплектовпроверяется на аппаратном уровне схемой контроля. Приобнаружении схемой сравнения различных выходных результатовАБ-ЧКУ переводится в безопасное состояние.
ПО построено по методу циклической обработки поступающих входных сигналов. Отсчет реального времени ведется по прерываниям от таймера с частотой 400 Гц. В моменты принятия решения о состоянии рельсовой линии блок-участка производится тестирование компонентов аппаратной части микропроцессорных комплектов, включая МПК, ОЗУ, ПЗУ и АЦП.
Тест МПК заключается в побитной установке разрядов регистров общего назначения в «1», а затем в «0», с проверкой правильности выполнения этой операции и операции условных переходов.
Тест ОЗУ заключается в подсчете контрольных сумм ячеек ПЗУ, занимаемых программой, и сравнении полученного результата с эталонным значением.
Тест АЦП заключается в последовательной проверке правильности работы микросхемы АЦП для трех эталонных значений входного напряжения: -5, 0, +5В.
При обнаружении ошибок перевод аппаратных средств в безопасное состояние выполняется путем:
запрета прерываний от таймера;
выдачи сигналов логического «0» на шины возбуждения сигнальных реле Ж, ЖЗ;
прекращения передачи кодовых сигналов в смежную РЦ;
перевода МПК в режим «Останов».
После считывания цифровых значений кодового сигнала с АЦП принимается решение о состоянии рельсовой линии с учетом изменяющихся условий передачи кодового сигнала (изменениесопротивления балласта, рельсов, стыковых соединителей и т. д.).
Декодирование кодовых сигналов осуществляется в конце длинного интервала. Этот интервал является синхронизирующимдля обработки последующих кодовых сигналов.
Для защиты от проблеска зеленого огня при движении по блок-участку короткой подвижной железнодорожной единицы при приеме кодовых сигналов Ж или З после шунтового режима решение принимается не сразу, а после одинакового декодирования четырех подряд следующих кодовых сигналов.
На программном уровне выполняются следующие функциитехнологического алгоритма:
контроль горения красного огня;
контроль одновременного горения ламп желтого и зеленого огней при четырехзначной АБ;
контроль временных параметров кодовых сигналов, передаваемых в смежную РЦ (при возникновении искажения в двух следующих подряд кодовых циклах дальнейшая их передача прекращается).
Зацикливание или выход из под контроля процесса выполнения программы контролируется таймером WDT(WatchDogTimer), выполняющим функцию «таймера-сторожа».