

Ersoy O.K. Diffraction, Fourier optics, and imaging (Wiley, 2006)(ISBN 0471238163)(427s) PEo
.pdf

ABERRATIONS |
211 |
EXAMPLE 13.3 Determine S, Cx, and Ax when the recording and reconstruction waves are plane waves.
Solution: In this case, zr and zc are infinite. Therefore S; cx, and Ax become
|
|
m |
" |
m2 |
|
|
|
# |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
S ¼ |
Mh4zo3 |
|
Mh2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Cx |
|
m xc m xo |
|
m2 |
1 |
|
xr m2 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
¼ Mh3zo2 |
"zc Mh zo |
|
Mh2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
! þ zr Mh2# |
|
|
|
|
|
||||||||||||||||||||
|
|
m |
|
xo2 |
|
|
m |
2 |
|
|
|
|
|
2m xo |
|
xc mxr |
2 |
||||||||||||
Ax |
|
|
|
|
|
|
1 |
|
|
|
|
xc mxr |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
¼ Mh2zo |
"zo2 |
Mh2 |
|
|
|
|
|
|
zc þ Mhzr þ zc þ Mhzr # |
||||||||||||||||||||
|
! Mh zo |
||||||||||||||||||||||||||||
EXAMPLE 13.4 Determine Cx and Ax when zr ¼ zo
Solution: After a little algebra, we find
|
¼Mh |
zo |
Mh2zo2 |
zc2 |
þ zr |
Mh2zo2 zc2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Cx |
|
m |
xo |
1 |
|
1 |
|
|
xr |
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
m |
xo2 |
1 |
|
|
m |
|
|
2 xo xc |
|
mxr xr2 1 |
|
m |
|
2 xc xr |
|||||||||||||||||||||
Ax |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
¼Mh |
zo2 Mhzo |
þ Mhzc þ zc zo zc þ Mhzr þ zr2 Mhzo Mhzc zc zc zr |
||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||

APODIZATION |
213 |
A subset of contractions is projections which are introduced in Section 14.7. There are a number of different types of projections. The method of projections on to convex sets (POCS) is the one which is relatively easier to handle, and it is covered in Section 14.8. This method is further discussed in succeeding chapters as a tool which is used within other algorithms for the design of diffractive optical elements and other diffractive optical devices. In Section 14.9, the Gerchberg–Papoulis algorithm is discussed as a special case of the POCS algorithm in which the signal and Fourier domains are used together with certain convex sets. Section 14.10 gives other examples of POCS algorithms.
Two applications that have always been of major interest are restoration from phase and restoration from magnitude. The second application is usually much more difficult to deal with than the first application. An iterative optimization method for restoration from phase is discussed in Section 14.11. Recovery from a discretized phase function with the DFT is the topic of Section 14.12.
A more difficult type of projection is generalized projections in which constraints do not need to be convex. In such cases, iterative optimization may or may not lead to a solution. This topic is covered in Section 14.13. Restoration from magnitude, also called phase retrieval, can usually be formulated as a generalized projection problem. A particular iterative optimization approach for this purpose is discussed in Section 14.14.
The remaining sections discuss other types of algorithms for signal and image recovery. Section 14.15 highlights the method of least squares and the generalized inverse for image recovery. The singular value decomposition for the computation of the generalized inverse is described in Section 14.16. The steepest descent algorithm and the conjugate gradient method for the same purpose are covered in Sections 14.17 and 14.18, respectively.
14.2APODIZATION
Apodization is the same topic as windowing in signal processing. Without loss of generality, it is discussed in one dimension below.
The major effect of the exit pupil function is the truncation of the input wave field. In signal theory, this corresponds to the truncation of the input signal. The Gibbs phenomenon also called ‘‘ringing’’ is produced in a spectrum when an input signal is truncated. This means oscillations near points of discontinuity. This is also true when the spectrum is truncated, this time ringing occurring in the reconstruction of the signal.
In order to be able to simulate the behavior of the truncated wave field, it can be sampled, and the resulting sequence can be digitally processed. Let z½n& be the truncated sequence due to the exit pupil, and Z(f) be the DTFT of z½n&.
Also let the sampling interval of u½n& be Ts. Truncation is equivalent to multiplying u½n& by a rectangular sequence o½n& in the form
u0½n& ¼ u½n&o½n& |
ð14:2-1Þ |
216 APODIZATION, SUPERRESOLUTION, AND RECOVERY OF MISSING INFORMATION
where
|
|
|
|
|
b ¼ cosh |
1 |
cosh |
1ð10aÞ |
ð14:2-9Þ |
N |
The corresponding time window o½n& is obtained by computing the inverse DFT of W(n) and scaling for unity peak amplitude. The parameter a represents the log of the ratio of the main-lobe level to the sidelobe level. For example, a equal to 3 means sidelobes are 3 decades down from the main lobe, or sidelobes are 60 dB below the main lobe.
Among the windows discussed so far, the simplest window is the rectangular window. The Bartlett window reduces the overshoot at the discontinuity, but causes excessive smoothing. The Hanning, Hamming, and Blackman windows achieve a smooth truncation of u½n& and gives little sidelobes in the other domain, with the Blackman window having the best performance. The Hamming and Gaussian windows do not reach zero at jnj ¼ N.
Often the best window is the Kaiser window discussed next.
14.2.1.5Kaiser Window
|
> |
|
|
|
n |
2 |
1=2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ð Þ |
|
! |
|
|
|
|
|
|
|
|
|
||||
|
< |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
o n |
8 I0 |
a 1 |
|
N |
|
|
|
|
0 |
|
n N |
ð |
14:2-10 |
Þ |
||||
½ & ¼ |
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
> |
|
|
|
|
|
|
|
|
|
|
|
j j |
|
|
|
||
|
|
I0 |
a |
|
|
|
|
|
|
|
|
|
|
|||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
0 |
|
|
|
|
|
|
|
|
otherwise |
|
|
|
||
where I0(x) is the zero-order modified Bessel function of the first kind given by |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x |
m |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
X |
6 |
|
|
7 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
I0 |
x |
Þ ¼ |
1 |
2 |
2 |
3 |
|
ð |
14:2-11 |
Þ |
|||||
|
|
|
|
|
||||||||||||||
|
|
|
|
ð |
|
m¼0 |
4 |
m! |
5 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
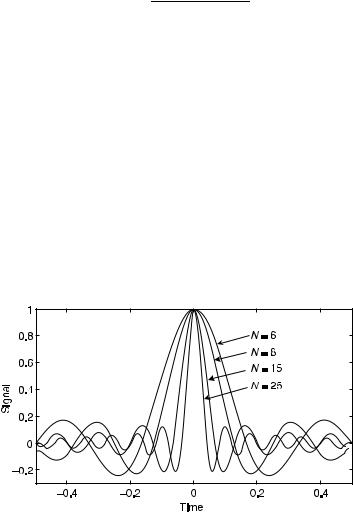
and a is a shape parameter which is chosen to make a compromise between the width of the main lobe and sidelobe behavior.
The Kaiser window is the same as the rectangular window when a equals 0. o½n& for N ¼ 20 and a ¼ 2, 4, 8, and 20 are shown in Figure 14.2. Increase of a at constant N reduces the sidelobes, but also increases the main lobe width. Increase of N at constant a reduces the main lobe width without appreciable change of sidelobes.
EXAMPLE 14.1 Rerun example 5.8 with apodization using the Hanning window along the x-direction. Compare the results along the x-direction and the y-direction. Solution: The Fraunhofer result obtained when apodization with the Hanning window along the x-direction is used with the same square aperture as shown in Figure 14.3. It is observed that there are less intense secondary maxima along the
