

Ersoy O.K. Diffraction, Fourier optics, and imaging (Wiley, 2006)(ISBN 0471238163)(427s) PEo
.pdf218 APODIZATION, SUPERRESOLUTION, AND RECOVERY OF MISSING INFORMATION
the circular aperture has a central lobe whose radius is given by |
|
||
d ¼ |
0:61 ld0 |
|
ð14:3-1Þ |
R |
|||
where d0 is the distance from the circular aperture. d is called the Rayleigh distance and is a measure of the limit by which two point sources can be resolved. Note that d is due to the exit pupil of the optical system, which is a finite aperture.
Finite aperture means the same thing as missing information since the wave field is truncated outside the aperture. Below the wave field is referred to as the signal since the topic discussed is the same as signal recovery in signal processing. In addition, the window function is generalized to be a distortion or transformation operator D, as commonly used in the literature on signal recovery. The coverage will still be in 1-D without loss of generality.
For a space-limited signal, the exact recovery of the signal is theoretically possible since the Fourier transform of such a signal is an analytic function [Stark, 1987]. If an analytic function is exactly known in an arbitrarily small region, the entire function can be found by analytic continuation. Consequently, if only a small part of the spectrum of such a signal is known exactly, the total spectrum and the signal can be recovered.
Unfortunately, especially due to measurement noise, the exact knowledge of part of the spectrum is often impossible. Instead, imperfect measurements and a priori information about the signal, such as positivity, finite extent, etc. are the available information.
The measured signal v can be written in terms of the desired signal u as
v ¼ Du |
ð14:3-2Þ |
where D is a distortion or transformation operator. With known D, the problem is to recover z (in system identification, the problem is to estimate D when v and u are known).
The straightforward approach to solve for u is to find D 1 such that
u ¼ D 1v v ¼ Du |
ð14:3-3Þ |
Unfortunately, D is often a difficult transformation. For example, when more than one u corresponds to the same v, D 1 does not exist. Such is the case, for example, when D corresponds to a low-pass filter. Even if D 1 can be approximated, it is often ill-conditioned such that slight errors cause large errors in the estimation of u. The problem of recovery of u under such conditions is often referred to as the inverse problem. In the following sections, signal recovery by contractions and projections will be studied as potential methods for solving inverse problems. These methods are usually implemented in terms of a priori information in the signal and spectral domains.
220 APODIZATION, SUPERRESOLUTION, AND RECOVERY OF MISSING INFORMATION
Another topic of importance is the fixed point(s) of the linear operator A. Consider
Au ¼ u |
ð14:4-7Þ |
Any vector u* which satisfies this equation is called a fixed point of A.
If the mapping A is strictly nonexpansive, and there are two fixed points u* and v*, then
ju v j ¼ jAu Av j < ju v j |
ð14:4-8Þ |
is a contradiction. It is concluded that there cannot be more than one fixed point in a strictly nonexpansive contraction.
14.4.1Contraction Mapping Theorem
When the mapping by A is strictly nonexpansive so that
jAu Avj ju vj |
ð14:4-9Þ |
where 0 < a < 1, then, A has a unique fixed point in S0.
Proof:
Let u0 be an arbitrary point in S0. The sequence uk ¼ Auk 1, k ¼ 1; 2; . . . is formed. The sequence ½uk& belongs to S0. We have
|
jukþ1 |
ukj ¼ jAuk |
Auk 1j ajuk |
uk 1j |
ð14:4-10Þ |
||||||||
and, by repeated use of Schwarz inequality, |
|
|
|
|
|
||||||||
jukþp ukj ¼ jukþp ukþp 1 þ ukþp 1 |
ukþp 2 þ ukþpþ2 ukj |
|
|||||||||||
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
¼ |
p |
|
ukþi 1j ðap 1 þ ap 2 þ þ 1Þjukþ1 |
ukj ð14:4-11Þ |
|||||||||
jukþi |
|||||||||||||
|
i¼1 |
|
|
|
|
|
|
|
|
|
|
|
|
Since |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jzkþ1 zkj akjz1 |
z0j |
|
|
ð14:4-12Þ |
|||||
and |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
p 1 |
þ a |
p |
2 |
|
1 |
ap |
1 |
|
ð14:4-13Þ |
||
|
|
|
|
þ þ 1 ¼ |
|
< |
|
; |
|||||
|
|
|
|
1 a |
1 a |
||||||||

222 APODIZATION, SUPERRESOLUTION, AND RECOVERY OF MISSING INFORMATION
As another example, if u(t) is an analog signal bandlimited by a system to frequencies below fc, Cu(t) can be written as
|
1 |
|
2 f t |
|
|
|
CuðtÞ ¼ |
ð |
uðtÞ |
sin p cð |
tÞ |
dt |
ð14:5-4Þ |
pðt tÞ |
|
|||||
|
1 |
|
|
|
|
|
Every estimate uk of u should be constrained by C. Cuk is interpreted as an approximation to ukþ1. The result Cuk is further processed with a distortion operator D, if any, to yield DCuk. Interpreting DCuk as an estimate of v, the output errorv is defined as
v ¼ v DCuk |
ð14:5-5Þ |
The recovered signal error between the (k þ 1)th and kth iterations can be defined as
u ¼ ukþ1 Cuk |
ð14:5-6Þ |
How does u and v relate? The simplest assumption is that they are proportional, say, u ¼ l v. Then,
Fuk ¼ ukþ1 ¼ Cuk þ u ¼ Cuk þ lðv DCukÞ |
ð14:5-7Þ |
This can also be written as
Fuk ¼ lv þ Guk |
ð14:5-8Þ |
where
G ¼ ðI lDÞC |
ð14:5-9Þ |
and I is the identity operator. The initial approximation to u can be chosen as u0 ¼ lv.
If F is chosen contractive, uk converges to a fixed-point u . Equation (14.5-8) shows that
jFuk Funj ¼ jGuk Gunj |
ð14:5-10Þ |
Thus, if F is contractive, so is G. With u0 ¼ lv, Eq. (14.5-8) becomes
Fuk ¼ ukþ1 ¼ u0 þ Guk |
ð14:5-11Þ |
ITERATIVE CONSTRAINED DECONVOLUTION |
223 |
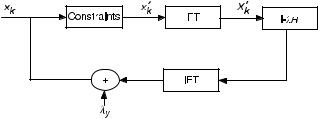
The procedure at the kth iteration according to Eq. (14.5-11) is as follows:
1.Apply the constraint operator C on uk, obtaining u0k.
2.Apply the distortion operator D on u0k, obtaining u00k .
3. Compute ukþ1 as u0 þ lðuk
An example of this method is given below for deconvolution.
14.6ITERATIVE CONSTRAINED DECONVOLUTION
Given v and h, deconvolution involves determining u when v is the convolution of u and h:
v ¼ h u |
ð14:6-1Þ |
When the iterations start with u0 ¼ lv, Eq. (14.5-8) can be written as |
|
ukþ1 ¼ lv þ ðd lhÞ Cuk |
ð14:6-2Þ |
where the constraint operator is simply the identity operator for the time being. The FT of Eq. (14.6-2) yields
Ukþ1 ¼ lV þ Uk lHUk |
ð14:6-3Þ |
where the capital letters indicate the FTs of the corresponding lowercase-lettered variables in Eq. (14.6-2)
Eq. (14.6-3) is a first-order difference equation in the index k. It can be written as
Ukþ1 |
|
ð1 lHÞUk ¼ lV |
ð14:6-4Þ |
||||
whose solution is |
|
|
|
|
|
|
|
|
|
V |
lH&kþ1u½k& |
|
|||
Uk ¼ |
|
|
½1 |
ð14:6-5Þ |
|||
H |
|||||||
where u½k& is the 1-D unit step sequence. As k ! 1, the solution becomes |
|||||||
|
|
U1 ¼ |
V |
ð14:6-6Þ |
|||
|
|
|
|
||||
|
|
H |
|||||
if |
|
|
|
|
|
|
|
|
j1 lHj < 1 |
ð14:6-7Þ |
|||||
Equation (14.6-6) is the same result obtained with the inverse filter. The advantage of the interactive procedure is that stopping the iterations after a finite number of steps may yield a better result than the actual inverse filter.
METHOD OF PROJECTIONS |
225 |
In many applications the impulse response is shift variant. The iterative method discussed above can still be used in the time or space domain, but the algebraic equations in the transform domain are no longer valid.
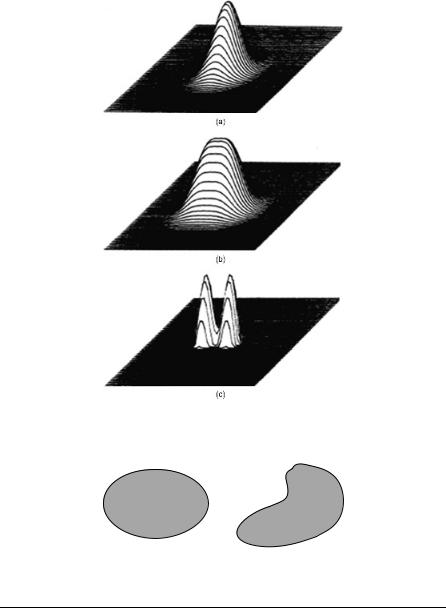
EXAMPLE 14.2 A 2-D Gaussian blurring impulse response sequence is given by
h |
m; n |
& ¼ |
exp |
m2 þ n2 |
|
½ |
|
|
100 |
The image sequence is assumed to be
u½m; n& ¼ ½dðm 24Þdðn 32Þ þ dðm 34Þdðn 32Þ&
(a)Determine the blurred image v ¼ u h. Visualize h and v.
(b)Compute the deconvolved image with l ¼ 2, 65 iterations, and a positivity constraint.
Solution: (a) The convolution of u and h is given by [Schafer, Mersereau, Richards]
v m; n |
|
exp |
ðm 24Þ2 þ ðn 32Þ2 |
|
exp |
ðm 34Þ2 þ ðn |
32Þ2 |
|
& ¼ |
100 |
# þ |
100 |
# |
||||
½ |
" |
" |
Plots of h and v are shown in Figure 14.5(a) and (b), respectively.
(b)Figure 14.5(c) shows the deconvolution results after 65 iterations.
14.7METHOD OF PROJECTIONS
A subset of contractions is projections. An operator P is called a projection operator or projector if the mapping Pu satisfies
j |
Pu |
u |
j ¼ |
v S0 |
j |
v |
u |
j |
ð |
14 |
: |
7-1 |
Þ |
|
|
inf |
|
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
where u 2 S, and S0 is a subset of S. In the context of signal recovery, S0 is the subset to which the desired signal belongs to. g ¼ Pu is called the projection of u onto S0. This is interpreted as the projection operator P generating a vector g 2 S0 which is closest to u 2 S. G is unique if S0 is a convex set. A very brief review of a convex set is given below.
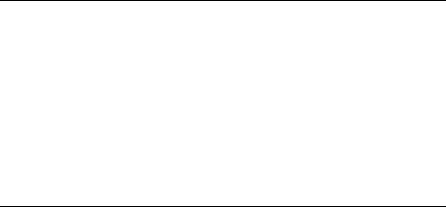
Let u1 and u2 belong to S0. S0 is convex, if for all l, 0 l 1, lu1 þ ð1 lÞu2 also belongs to S0. A convex set and a nonconvex set are visualized in Figure 14.6.
It can be shown that if S0 is convex, then P is contractive [Youla]. Hence, it is desirable that S0 is indeed convex. If so, the resulting method is called projections onto convex sets. We will consider this case first.
226 APODIZATION, SUPERRESOLUTION, AND RECOVERY OF MISSING INFORMATION
Figure 14.5. Deconvolution of blurred 2-D signal: (a) Gaussian blurring function, (b) blurred signal,
(c) recovered signal by deconvolution [Courtesy of Schafer, Mersereau, Richards].
Convex set |
Nonconvex set |
Figure 14.6. Examples of a convex set and a nonconvex set.
EXAMPLE 14.3 Consider the set S3 of all real nonnegative functions uðx; yÞ (such as optical field amplitude) that satisfy the energy constraint
ðð
juj2 ¼ juðx; yÞj2dxdy E
Show that S3 is convex.
METHOD OF PROJECTIONS ONTO CONVEX SETS |
227 |
Solution: Consider u1; u2 2 S3. For 0 l 1. The Cauchy–Schwarz inequality to will be used to write
jlu1 þ ð1 lÞu2j lju1j þ ð1 lÞju2j lE1=2
Hence, the set is convex.
EXAMPLE 14.4 Consider the set S4 of all real functions in S whose amplitudes must lie in the closed interval [a,b], a < b, and a 0, b > 0. Show that S4 is convex. Solution: For 0 l 1, we write
u3 ¼ lu1 þ ð1 lÞu2 la þ ð1 lÞa ¼ a
for the lower bound, and
u3 ¼ lu1 þ ð1 lÞu2 lb þ ð1 lÞb ¼ b
for the upper bound. Hence, u3 2 S0, and S4 is convex.
14.8METHOD OF PROJECTIONS ONTO CONVEX SETS
The method of POCS has been successfully used in signal and image recovery. The viewpoint is that every known property of an unknown signal u is considered as a constraint that restricts the signal to be a member of a closed convex set Si. For M properties, there are M such sets. The signal belongs to S0, the intersection of these sets:
\M
S0 ¼ Si |
ð14:8-1Þ |
i¼1 |
|
The signal restoration problem is defined as projecting v, the corrupted version of u, onto S0.
Let Pi denote the projector for the set Si. Let us also define the operator Ti by
Ti ¼ 1 þ liðPi 1Þ |
ð14:8-2Þ |
If ui is the fixed-point of Pi in Si, we get
T |
u |
¼ |
u |
þ lið |
P |
u |
u |
Þ ¼ |
u |
ð |
14:8-3 |
Þ |
i |
i |
i |
i |
i |
i |
i |
|