

Бакаев Методы статистических испытаний 2007
.pdfДля упрощения методики моделирования перейдем к сферическим координатам r,ϑ, ϕ , которые связаны с
декартовыми посредством формул
x = r sinϑcosϕ, |
y = r sinϑsinϕ, |
z = r cosϑ, |
|
|||
0 ≤ r <1, 0 ≤ϑ < π, |
0 ≤ϕ < 2π. |
|
|
|
||
Если в |
указанные |
формулы |
вместо |
x, y, z, r, ϑ иϕ |
||
подставить соответственно X, Y, Z, R, |
Θ и Φ, |
то получается |
||||
фактически связь между старыми (декартовыми) |
случайными |
|||||
величинами |
X, Y, Z |
и новыми (сферическими) |
случайными |
|||
величинами R, Θ , Φ, принимающими свои значения в интервалах (0; 1), (0; π) и (0; 2π), соответственно. Поскольку якобиан преобразования от декартовых координат к сферическим известен
∂(x, y,z) = r 2 sinϑ ,
∂(r,ϑ,ϕ)
то легко выписать плотность распределения в новых координатах (обозначим ее через q(r,ϑ,ϕ)):
q(r,ϑ,ϕ)= p(x, y,z) |
∂(x, y,z) |
|
= |
3 |
r 2 sinϑ . |
|
∂(r,ϑ,ϕ) |
4π |
|||||
|
|
|
||||
Как нетрудно заметить, последняя формула может быть переписана в виде
q(r,ϑ,ϕ) = (3r 2) (12 sinϑ)(2π)-1 .
Поскольку каждый из множителей, выделенных структурно в правой части, представляет собой плотность одномерного распределения случайной величины R, Θ и Φ, соответственно, то совместная плотность распределения трехмерной случайной величины (R, Θ ,Φ) представляется в виде произведения соответствующих одномерных плоскостей, что в свою очередь
71

свидетельствует о взаимной независимости одномерных случайных величин R, Θ иΦ. Таким образом, эти случайные величины можно моделировать независимо друг от друга, используя формулы метода обратных функций,
∫R 3r 2 d r = Γ |
, |
1 |
∫Θsinϑ dϑ = Γ |
|
, |
1 |
∫Φ |
dϕ = Γ |
|
, |
|
2 |
|
2 π |
|
||||||||
0 |
1 |
|
0 |
2 |
|
0 |
|
3 |
|
||
что впрочем, эквивалентно более простым формулам
R = 3 Γ , |
cosΘ =1− 2 Γ |
2 |
, |
Φ = 2πΓ |
3 |
. |
1 |
|
|
|
|
Окончательно, используя результаты моделирования для R, Θ , Φ можно вернуться к исходным случайным величинам по формулам
X = Rsin ΘсоsΦ , Y = Rsin ΘsinΦ, Z = R cosΘ .
Моделирование многомерной нормальной случайной величины с коррелированными координатами
Корреляция является одной из самых больших проблем, с которыми сталкиваются количественные аналитики и рискменеджеры, практикующие методы статистического моделирования для принятия финансово-инвестиционных решений. В частности, самооценка подверженности риску любого инвестиционного банка, часто рассчитываемая как квантиль VaR (Value at Risk), также заметно меняется при варьировании предположений о взаимозависимости между всеми вовлеченными рыночными факторами риска.
Остановимся подробно на исследовании наиболее важного для практики частного случая, когда моделируется многомерная нормально распределенная случайная величина с заданной матрицей ковариации С и с нулевыми
72

математическими ожиданиями.7 Итак, будем моделировать многомерную случайную величину Х = (Х1; Х2; …; Хn) с (совместной) плотностью распределения
|
p(x) = p(x1, x2 ,…, xn) = (2π)− |
n |
1 |
e− |
1 |
C |
−1 |
x,x , |
|
|||||||
|
2 |
|
C |
|
− |
|
2 |
|
|
|||||||
|
|
|
2 |
|
|
|||||||||||
где |С| – определитель матрицы |
С, |
|
x,y = ∑in=1 xi yi |
– |
||||||||||||
скалярное |
произведение |
векторов |
|
|
x = (x1; x2;…; xn) |
и |
||||||||||
y = (y1; y2;…;yn), а |
C −1 x ,x |
– соответственно |
|
квадратичная |
||||||||||||
форма, порожденная матрицей С -1, то есть |
|
|
|
|
|
|
|
|||||||||
|
|
n |
|
n |
n |
−1 ) xi x j . |
|
|||||||||
|
C−1 x,x = ∑(C−1 x ) xi = ∑ ∑(C |
|
||||||||||||||
|
|
i=1 |
i |
i=1 j=1 |
|
ij |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
Нам |
будет |
удобно |
ввести |
набор |
|
новых |
координат |
|||||||||
y = (y1 ; y2;…;yn), |
связанных |
со |
старыми |
|
|
посредством |
||||||||||
матричного преобразования |
|
x=Vy, |
(4.9) |
где V = (vij) – некоторая (пока не определенная) |
n × n – мат- |
рица. Тогда квадратичную форму <C -1x,x> можно расписать в новых координатах как
<C -1x,x> = <C -1Vy, Vy>,
или, используя известные свойства матричных операций,
<C -1x,x> = <V TC -1Vy,y>, |
(4.10) |
где VT — матрица, транспонированная к матрице V. Потребуем теперь, чтобы8
7Впрочем, приведенная ниже техника легко обобщается на случай ненулевых математических ожиданий.
8 Напомним, что конкретный вид матриц V до сих пор не был еще определен.
73
V TC -1V = E, |
(4.11) |
где Е — единичная матрица порядка n. Умножая последнее матричное соотношение слева на (VT)-1, а справа на V -1, приходим к формуле
C -1=(V T) -1V -1, |
|
откуда для самой матрицы С получаем9 |
|
С=VV T. |
(4.12) |
Считая в дальнейшем, что матрица V подобрана в соответствии с условием (4.12), якобиан преобразования (4.9) легко вычисляется10 и равен:
∂(x1; x2 ;…;xn ) = V . ∂( y1; y2 ;…; yn )
Кроме того, используя формулу (4.12), имеем, применяя известные свойства определителей,
C = V 
 VT = V 2 ,
VT = V 2 ,
откуда
1
V = C 2 ,
так что на самом деле можно получить
∂(x1; x2 ;…; xn ) = С 1 .
2
∂( y1; y2 ;…; yn )
Последний результат позволяет с учетом (4.10) и (4.11) вычислить плотность распределения в новых координатах
9Напомним, что, как известно из теории матриц (см., например, [ 6, п. 4.59]), при обращении матричного произведения порядок матричных сомножителей изменяется на противоположный.
10Заметим, что это преобразование — линейное.
74

q( y , y |
|
,…, y |
n |
) = |
p(x ,x |
|
,…,x |
n |
) |
|
∂(x1; x2 ;…; xn ) |
|
= |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
1 |
2 |
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
∂( y ; y |
2 |
;…; y |
n |
) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
n |
|
|
|
|
1 |
|
|
|
− |
1 |
|
|
C −1х,х |
|
|
|
1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
− |
|
|
C |
− |
2 |
|
e |
|
|
|
|
|
|
C |
2 |
= |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
= (2 π) |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||||||||
|
|
|
|
= (2 π)−n2 |
|
e− |
C −1х,х = (2 π)−n2 e− |
у,у = |
|||||||||||||||||||||||||||||
|
|
|
|
|
2 |
2 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
n |
|
|
|
|
− |
1 |
|
|
|
|
|
− |
yi2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
= ∏ |
|
|
|
2 e |
2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
(2 π) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
откуда |
|
следует, |
i |
=1 |
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
плотность |
||||
|
|
что |
|
|
|
|
|
|
|
новых координатах |
|||||||||||||||||||||||||||
распределения представляется как произведение одномерных плотностей, каждая из которых соответствует нормальному распределению с параметрами (0,1). Обозначая набор соответствующих одномерных случайных величин через Y = (Y1;Y2;…;Yn), можно сделать вывод, что имеет место связь
X = V Y, |
(4.13) |
а, кроме того, все Y1,Y2,…,Yn – независимы и каждая из них распределена по нормальному закону с параметрами (0,1). Вопрос моделирования таких случайных величин уже обсуждался в параграфе 4.1. Окончательное моделирование многомерной случайной величины Х проводится на основе применения матричного соотношения (4.13).
Остался невыясненным вопрос нахождения матрицы V, удовлетворяющей соотношению (4.12). Известно, что матрица ковариации С симметрична и положительно определена. Из теории матриц следует11, что в этом случае существует нижняя треугольная матрица V, удовлетворяющая условию (4.12). Это соображение значительно облегчает построение нужной матрицы V, так как достаточно искать ее в классе нижних треугольных матриц. Другими словами, для матрицы V = (vij )n×n можно считать, что vij = 0 при i < j , а
11 См., например, [6, п. 11.10]
75
элементы vij с i ≥ j (их общее количество равно n (n+1)/2) определяются тогда из n (n+1)/2 уравнений
∑j vilvjl = cij , |
1 ≤ j ≤ i ≤ n, |
l =1 |
|
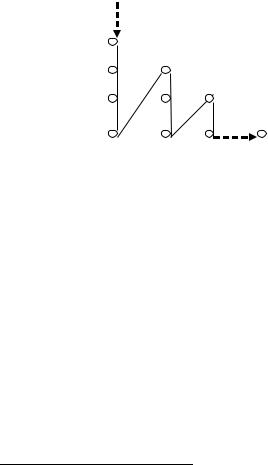
где cij – элементы матрицы С. Удобно решать последнюю систему, например, по схеме, указанной на рис. 4.2.
Рис. 4.2. Схема последовательного определения элементов матрицы V
Пример 4.5. Пусть требуется смоделировать нормально распределенные случайные величины Х1 и Х2 с параметрами (0,1) и с заданным коэффициентом корреляции ρ = M[X1 X 2 ].12
В качестве исходных объектов для моделирования примем независимые случайные величины Y1 и Y2, каждая из которых распределена нормально с параметрами (0,1). Как уже неоднократно отмечалось ранее, их моделирование представляет собой стандартную и хорошо изученную задачу. Матрица ковариации для моделируемых случайных величин X1 и X2 имеет вид
1 |
ρ |
||
С = |
|
|
. |
|
ρ |
1 |
|
|
|
||
12Напомним, что коэффициент корреляции всегда удовлетворяет условию
ρ[−1;1].
76
Легко тогда проверить, что матрица
|
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
V = |
ρ |
1− |
ρ |
|
|
|
|
|||
удовлетворяет условию |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 1 |
ρ |
1 |
ρ |
= C . |
|||||||
VV T = |
|
|
2 |
|
|
|
|
2 |
|
= |
|
|
|
− |
ρ |
|
0 |
1− |
ρ |
|
|
|
|
||
ρ 1 |
|
|
|
|
ρ |
1 |
|
|||||
Таким образом, X1 и X2 |
|
могут быть смоделированы на основе |
||||||||||
формулы (4.13) путем использования соотношений:
X1=Y1, X 2 = ρY1 +  1− ρ2 Y2 .
1− ρ2 Y2 .
4.4 Метод суперпозиции
Предположим, что функция F(x) одномерной случайной величины X представима в виде
m |
(4.14) |
F(x) = ∑ck Fk (x) , |
|
k=1 |
|
где Fk (x ) – некоторые функции распределения, |
а все |
коэффициенты разложения ck > 0, k = 1,2,…,m. В частности, допустимо принять m = ∞ . Полагая в обеих частях данного равенства х → ∞ и пользуясь известным свойством функций распределения
lim F(x)=lim Fk (x)=1,
x→∞ x→∞
приходим к выводу, что с необходимостью должно выполняться
77

m
∑ck =c1 + c2 +…+ cm =1.
k =1
Таким образом, коэффициенты сk, k = 1, 2,…, m, имеют смысл вероятностей, с которыми некоторая дискретная случайная величина принимает свои значения. Основываясь на этом наблюдении, введем дискретную случайную величину Y с законом распределения
|
1 |
2 |
|
… |
|
m |
|
|
c1 |
c2 |
|
… |
|
cm |
|
так что P ({Y = k })= ck , |
k=1,2,…,m. |
|
|
|
|||
Метод суперпозиции был предложен Дж. Батлером13 и |
|||||||
состоит фактически в следующем. |
|
|
|
|
|||
Пусть Г1 и Г2 — независимые случайные числа. Пусть |
|||||||
вначале число Г1 используется для |
моделирования значения |
||||||
Y = k случайной величины Y14, а затем |
|
при соответствующем |
|||||
k случайная величина Х моделируется путем решения уравнения Fk(x) = Г2, тогда смоделированная таким образом
случайная величина |
Х |
будет |
иметь как раз функцию |
|
распределения F(х). |
|
|
|
|
Действительно, |
достаточно |
применить формулу полной |
||
вероятности |
|
|
|
|
P({X < x })= ∑ P |
({ X < x |Y = k })= ∑Fk (x)ck = F(x) |
, |
||
m |
|
|
m |
|
k =1 |
|
k =1 |
|
|
откуда и следует, что F(х) – функция распределения случайной величины Х.
13См. J. W. Butler, Machine sampling from given probability distributions, Symposium on Monte Carlo methods, ed. H.A. Meyer, Wiley, New York, 1956, p. 249-264.
14См. параграф 4.1.
78

m |
Fk (x) возникают |
Функции распределения вида F(x)= ∑ ck |
|
k=1 |
|
на практике, когда появляется смесь из случайных величин, различным образом распределенных. В этом случае применение метода суперпозиции является по существу рецептом для моделирования случайной величины Х с функцией распределения F(x).
С другой стороны, представление (4.14) зачастую вводится искусственным образом с целью облегчить процедуру моделирования искомой случайной величины X. Следующий пример демонстрирует один из часто применяемых приемов моделирования, использующих идею метода суперпозиции.
Пример 4.6 (Дж. Батлер)
Пусть случайная величина X принимает значения в интервале (0;1) и пусть ее функция распределения представима рядом
∞ |
(4.15) |
F(x) = ∑ck xk , |
k =1
∞
где ck ≥ 0 при всех k=1,2,… и ∑ck =1. Требуется построить
k =1
рациональный алгоритм моделирования случайной величины X.
Прежде всего заметим, что представление (4.15) есть по существу разложение функции распределения в ряд Маклорена, при этом вытекающее из (4.15) условие F(0) = 0 является естественным, так как значения Х сосредоточены на интервале
(0;1).
Далее, положим Fk(x) := xk при x (0;1)15 и воспользуемся для моделирования принципом суперпозиции, который в
15 Очевидно, Fk(x) удовлетворяет всем свойствам функции распределения.
79

данном конкретном случае реализуется по двухступенчатой схеме16:
а) сначала из условия
k −1 |
k |
∑c j < Г1 |
≤∑c j |
j=1 |
j=1 |
выбирается k;
б) затем моделируется сама случайная величина Х по формуле
1
X = (Г2)k .
Пример 4.7. Рассмотрим для иллюстрации более конкретную версию предыдущего примера. Пусть случайная величина Х принимает значение в интервале (0; 1) и пусть ее плотность распределения представима в виде
p(x)= c(2 x+6 x5 ) .
Требуется смоделировать случайную величину Х.
Определим вначале численное значение константы c из условия нормировки
|
|
|
|
|
|
1 = ∫01 ρ(x) d x = c ∫01(2 x+ 6 x5 ) d x = 2c , |
то есть |
c = |
1 |
. При этом для функции распределения имеем |
|||
|
||||||
( |
) |
|
2 |
2 |
|
|
|
|
|
|
|||
F x |
|
= |
1 |
(x 2 |
+ x 6 ) . Далее, полагая F1(x) = x2 и F2(x) = x6, |
|
|
|
|||||
представим F(x) как
F(x) = c1F1(x)+c2F2(x).
16 Как и выше, через Г1 и Г2 обозначается пара независимых случайных чисел.
80