

Загребаев Методы обработки статистической информации в задачах контроля 2008
.pdfПусть квадратная матрица T(i) имеет вид
|
i |
|
|
|
|
−1 |
T(i) = |
κ∑ |
|
( j) |
|
т( j) + U |
, |
t |
t |
|||||
|
j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
где κ – скаляр; t ( j) – вектор; U – постоянная симметричная мат-
рица той же размерности, то справедливо следующее рекуррентное соотношение:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т(i)T(i −1) |
|
|
||||||||
|
|
|
|
|
T(i) = T(i − |
1) − |
T(i −1)t |
(i)t |
, |
|
|||||||||||||||||||||
|
|
|
|
|
|
κ−1 + t |
т(i)T(i −1)t(i) |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T(0) = U−1 . |
|
|
|
|
|
|
|||||||||||||
|
|
Полагая |
|
|
T(i) = Γ(i) ; T(i −1) = Γ(i −1) ; |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
κ = − ∫F ′(η) f ′(η)dη; |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
∂ψ( j,c ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
t (i) = |
|
|
; |
|
|
U = 0 , |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
∂c |
|
|
|
|
|
ˆ |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
=ci−1 |
|
|
|
|
|
|
|
|
|
|
|
|
получим для коэффициента усиления Γ(i) |
следующее рекуррентное |
||||||||||||||||||||||||||||||
выражение : |
|
|
|
|
|
|
Γ(i) = Γ(i −1) − |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
∂ |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Γ(i −1) |
∂ψ(i,c ) |
|
|
|
ψ(i,c ) |
|
|
|
|
Γ(i −1) |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
∂c |
|
|
|
∂c |
|
|
ˆ |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
c =c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
− |
|
|
|
|
|
|
|
|
|
|
|
i−1 |
|
|
|
|
|
|
|
|
c |
=ci−1 |
|
|
|
|
|
. (3.4.42) |
|||
|
|
∞ |
′ |
′ |
|
−1 |
|
∂ |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
− |
∫ |
|
|
|
+ |
|
ψ(i,c ) |
|
|
|
|
Γ(i −1) |
∂ψ(i,c ) |
|
|
|
|
||||||||||||
|
F (η) f |
(η)dη |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
−∞ |
|
|
|
|
|
|
|
∂c |
|
|
|
|
|
ˆ |
|
|
|
|
|
|
∂c |
|
|
ˆ |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
=c |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
=ci−1 |
|
|
|
|
|
|
|
|
|
i−1 |
||
|
|
В качестве начального приближения принимают матрицу |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Γ(0) = νI , |
|
|
|
|
(3.4.43) |
|||||||||||||
где ν – большое число.
Таким образом, оптимальный рекуррентный алгоритм будет состоять из двух вычисляемых формул
ˆ ˆ |
′ |
ˆ |
∂ψ(i,c ) |
|
|
|
|
|
|
|
|||||
ci = ci−1 |
|
|
|
|
, |
(3.4.44) |
|
+ Γ(i)F (ε(i,ci−1))) |
∂c |
|
|
||||
|
|
|
|
ˆ |
|
||
|
|
|
|
|
c |
=ci−1 |
|
221

где Γ(i) вычисляется на каждом шаге рекуррентного процесса по формуле (3.4.42) при начальных условиях (3.4.43). Начальное при-
ˆ
ближение c0 может быть задано любым вектором соответствую-
щей размерности.
В заключение данного раздела запишем рекуррентный оптимальный алгоритм для линейного динамического объекта
n |
n |
n |
y(i) = −∑a j y(i − j) + ∑ bk u(i − k) + ∑dl η(i −l) . |
||
j=1 |
k=0 |
l=0 |
Как известно, оптимальная настраиваемая модель, соответствующая данному объекту, имеет вид:
n |
|
|
n |
|
||
y(i) = −∑a j y(i − j) + ∑ bk u(i − k) + |
|
|||||
j=1 |
|
|
k=0 |
|
||
n |
|
|
|
|
||
+∑ |
dl |
( y(i |
−l) − y(i −l)) , |
|
||
|
|
|||||
l=1 d0 |
|
|
|
|
||
или, используя введенные в разд. 3.1.1 обозначения, |
|
|||||
~ |
|
|
т ~ |
|
||
|
y(i) = z(i) |
c . |
|
|||
Тогда |
|
|
|
|
||
~ |
|
|
|
|
||
|
∂ψ(i, c ) |
= z |
(i) . |
(3.4.45) |
||
~ |
|
|||||
|
|
∂c |
|
|
|
|
Подставляя (3.4.45) в рекуррентные соотношения (3.4.42), (3.4.44), получим:
|
ˆ |
ˆ |
|
|
|
|
′ |
|
ˆ |
|
|
(3.4.46а) |
|
|
c(i) = c(i −1) + Γ(i)F (ε(i, c(i −1)))z(i) ; |
||||||||||||
Γ(i) = Γ(i −1) − |
|
|
|
|
Γ(i −1)z (i)z т(i)Γ(i −1) |
|
, |
||||||
|
|
∞ |
′ |
′ |
|
−1 |
т |
|
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
∫ |
|
|
|
|
|
|||
|
|
|
|
− |
|
F |
(η) f (η)d |
η |
+ z (i)Γ(i −1)z (i) |
||||
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
т |
|
ˆ |
|
(3.4.46б) |
||
|
|
ε(i, c (i −1)) = y(i) − z |
|
(i)c(i −1) , |
|||||||||
ˆ |
– любой вектор; Γ(0) = λI ; λ – большое число. |
|
|
||||||||||
где c(0) |
|
|
|||||||||||
222

3.4.5.Оптимальная функция потерь
Впредыдущем разделе была получена формула, которая отражает зависимость АМКО от функции потерь F(η) и плотности
распределения шумов f (η) при оптимальном (в смысле минимума АМКО) выборе матрицы B
|
|
∞ |
|
|
|
|
|
|
|
|
∫ F′2 (η) f (η)dη |
|
A−1 |
(c,ση2 ). |
|||
V(F, f ) = |
−∞ |
|
|
|
|
|||
|
|
|
|
2 |
||||
|
|
∞ |
′ |
′ |
|
|
|
|
|
|
∫ |
F (η) f |
|
|
|
|
|
|
|
|
(η)dη |
|
|
|
||
|
−∞ |
|
|
|
|
|
|
|
Будем считать, что плотность распределения ошибок измерений известна. Тогда поставим задачу подобрать такую функцию потерь F * (ε) , которая обеспечит минимальное значение АМКО.
Для решения этой задачи отметим, что любую функцию потерь можно представить в виде суммы F *(ε) + λδF(ε) , где δF(ε) –
малая вариация функции потерь, λ – скалярный множитель. Тогда АМКО будет функцией скалярного параметра λ и плотности распределения f (η) . Учитывая, что f (η) определена природой шума,
АМКО будет функцией только одного параметра λ:
ϕ(λ) = V(F * (ε) + λδF(ε), f ) .
В этом случае условие экстремума АМКО имеет вид:
ϕ′(λ) λ=0 = 0 .
Рассмотрим, что представляет собой матрица ϕ(λ):
ϕ(λ) = V(F * +λδF, f ) =
∞ |
|
|
|
|
′2 |
|
|
|
∞ |
|
|
|
′ |
|
′ |
|
|
2 |
∞ |
|
|
′2 |
|
|
|
|
∫ |
|
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
∫ |
|
|
|
|
|||||
|
f (η)F * (η)dη+ 2λ |
|
f (η)F * (η)δF (η)dη+ λ |
|
|
|
|
|
× |
||||||||||||||||
|
|
|
|
|
|
f (η)δF (η)dη |
|||||||||||||||||||
−∞ |
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
||
|
|
|
|
∞ |
|
|
|
|
|
|
2 |
|
∞ |
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
∫ |
′ |
|
′ |
|
|
|
|
|
∫ |
′ |
|
′ |
|
|
∫ |
|
′ |
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ 2λ |
f (η)F * (η)dη |
|
f (η)δF (η)dη+ |
|
||||||||||
|
× |
|
f (η)F * (η)dη |
|
|
|
|
|
|||||||||||||||||
|
|
−∞ |
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
−∞ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
2 |
−1 |
×A−1 (c ,ση2 ). |
|
|
|
|
||||
|
|
|
|
|
|
|
+λ2 |
∫ f |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
′(η)δF ′(η)dη |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
223
Тогда
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
2 |
|
′ |
|
|
|
= |
|
|
|
|
|
′ |
|
′ |
|
|
|
′ |
|
′ |
|
− |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ϕ (λ) |
|
λ=0 |
2 |
∫ |
f (η)F * (η)δF (η)dη |
∫ |
f (η)F * (η)dη |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
∞ |
|
|
|
|
∞ |
|
|
′2 |
|
|
|
|
|
|
∫ |
|
′ |
|
|
|
′ |
|
∫ |
′ |
|
′ |
|
∫ |
|
|
|
|
|
|
|
−2 |
|
f (η)F * (η)dη |
f (η)δF (η) |
f |
|
|
|
|
|
|
||||||||||||
|
|
|
|
(η)F * (η)dη × |
|
|||||||||||||||||
−∞ |
|
|
|
|
|
|
|
−∞ |
|
|
|
−∞ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
∞ |
|
|
|
|
|
4 |
−1 |
|
|
|
(c |
|
|
|
|
|
|
|
|
|
|
∫ f |
′ |
|
′ |
|
|
×A |
−1 |
2 |
|
|
|
|
|||||
|
|
|
× |
(η)F |
* (η)dη |
|
,ση )= 0 . |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принимая во внимание, |
что A−1 (c,ση2 ) |
не нулевая матрица, и |
||||||||||||||||||||
|
|
|
|
∞ |
f |
′ |
′ |
|
|
|
|
, получим |
|
|
|
|
|
|||||
допуская, что |
∫ |
(η)F * (η)dη ≠ 0 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
∞ |
|
|
|
′ |
|
|
′ |
|
∞ |
′ |
|
′ |
|
|
|
|
||
|
|
|
|
∫ f (η)F * (η)δF (η)d |
η ∫ |
f |
(η)F * (η)dη = |
|
|
|
||||||||||||
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
∞∞
=∫ f ′(η)δF′(η)dη ∫ f (η)F *′2 (η)dη.
−∞ −∞
Преобразуя последнее выражение, можно записать:
∞ |
′ |
′ |
|
∞ |
f |
′ |
′ |
||
∫ f |
(η)F * (η)δF (η)dη |
|
∫ |
(η)δF |
(η)dη |
||||
−∞ |
|
|
− |
−∞ |
|
|
|
|
= 0 . |
∞ |
|
∞ |
|
|
* ′ |
|
|||
|
|
|
|
|
|
||||
∫ |
′2 |
(η)dη |
|
∫ |
f |
′ |
(η)dη |
||
f (η)F * |
|
(η)F0 |
|||||||
−∞ |
|
|
−∞ |
|
|
|
|
|
|
Внесем интегралы, стоящие в знаменателях, под интегралы числителей, тогда получим
∞ |
f |
′ |
′ |
∞ |
|
f |
′ |
′ |
||
∫ |
(η)F * (η)δF (η) |
dη = |
∫ |
|
|
(η)δF (η) |
dη . |
|||
∞ |
|
∞ |
|
′ |
|
|||||
−∞ |
∫ |
′2 |
(η)dη |
−∞ |
∫ |
f |
′ |
|||
|
f (η)F * |
|
(η)F * (η)dη |
|||||||
|
−∞ |
|
|
|
−∞ |
|
|
|
|
|
224
Так как δF ′(η) может быть любой функцией, то
|
′ |
|
|
|
f |
′ |
|
|
|
f (η)F * (η) |
= |
|
(η) |
, |
(3.4.47) |
||
∞ |
′2 |
|
∞ |
′ |
′ |
|||
∫ |
(η)dη |
|
∫ f |
|
|
|||
f (η)F * |
|
(η)F * (η)dη |
|
|
||||
−∞ |
|
|
|
−∞ |
|
|
|
|
или, после умножения обеих частей (3.4.47) на F *′(η) , получим
|
′2 |
(η) |
|
f |
′ |
′ |
|
|
|
f (η)F * |
= |
|
(η)F * (η) |
. |
(3.4.48) |
||
∞ |
′2 |
|
∞ |
|
|
|||
|
|
′ |
′ |
|
||||
∫ |
(η)dη |
∫ f |
|
|||||
f (η)F * |
(η)F * (η)dη |
|
||||||
−∞ |
|
|
|
−∞ |
|
|
|
|
Нетрудно заметить, что последнее выражение представляет собой равенство нормированных функций. Это равенство справедливо только в том случае, если сами функции пропорциональны. Таким образом, получаем
f (η)F *′2 (η) = k1 f ′(η)F *′(η) ,
где k1 – коэффициент пропорциональности. Отсюда следует, что
F *′(η) = k1 ff ′((η)) ,
η
т.е.
F *′(η) = k1 ff′((η)) = k1{ln f (η)}′.
η
И, следовательно, оптимальная функция потерь определяется соотношением:
F* (ε) = k1 ln f (η) η=ε + k2 .
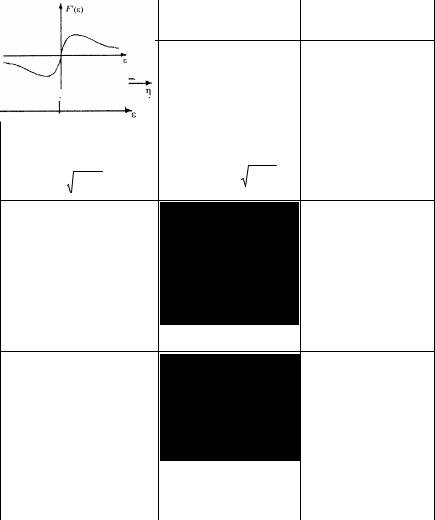
Впоследнем выражении неопределенными оказываются коэффициенты k1 и k2 . Для их определения рассмотрим графики типо-
вых плотности распределения шума η и логарифма от плотности распределения (рис. 3.5).
Как правило, плотность распределения f (η) является четной функцией, а логарифм плотности распределения – четная убывающая функция, имеющая максимальное значение при η = 0. Таким
225
образом, для того, чтобы F ′* (ε) = k1 ff ′((ηη)) имела смысл функции
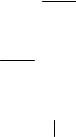
потерь, т.е. имела минимум при ε = 0 (что эквивалентно η = 0), необходимо условие k1 < 0 (рис. 3.6).
|
|
|
|
|
|
|
|
|
а |
|
б |
Рис. 3.5. Типичный вид плотности распределения (а) и логарифма плотности распределения шума η (б)
Рис.3.6. График зависимости функции потерь от невязок ε при k1 < 0 и k2 > 0
Что же касается параметра k2 , то он определяет минимальное значение F * (0) . При k2 > k1 ln f (0) всегда выполняется неравенство F * (ε) > 0 .
Таким образом, оптимальная функция потерь не единственна, а зависит от параметров k1 и k2 . Этот факт является следствием того, что АМКО зависит не от F(ε) , а от F ′(ε) .
226
Для задач идентификации конкретные значения этих параметров несущественны. Удобно принять k1 = −1, а k2 = 0 . Таким об-
разом, оптимальная функция потерь равна логарифму плотности распределения помех с обратным знаком:
F * (ε) = −ln f (η) |
|
η=ε . |
(3.4.49) |
|
|||
|
|
Сравнивая полученный результат с оптимизируемым критерием в методе максимума правдоподобия при аддитивной помехе можно сделать вывод об их полной идентичности.
Приведем примеры оптимальных функций потерь и их производных.
1. Нормальная плотность распределения помех (плотность распределения Гаусса) при условии взаимной некоррелированности измерений
f (η) = |
1 |
exp |
−η2 |
/ 2σ2 |
(i) |
= N (0,σ |
η |
(i)) . |
|
||||||||
|
2π ση(i) |
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
Функция потерь, согласно (3.4.49), будет иметь вид:
F *(ε) = ε2 / 2ση2 (i) + ln 2πση(i) ,
′ |
2 |
(3.4.50) |
F * (ε) = ε / ση(i) . |
||
Поскольку положение экстремума не зависит от постоянного слагаемого ln 2πση(i) , то можно записать следующий оптимизируемый критерий:
|
N |
|
|
|
|
J (c ) = ∑( y(i) − y(i))2 (1 |
ση(i)) |
||||
|
i=1 |
|
|
|
|
или в векторной форме: |
|
|
т |
D |
|
J (c ) = ( y − y) |
|
( y − y) . |
|||
|
|
|
|
η |
|
Таким образом, при нормальном законе распределения использование оптимальной функции потерь эквивалентно применению метода наименьших квадратов.
2. Экспоненциальная плотность распределения помех (плотность распределения Лапласа) при условии взаимной некоррелированности измерений
f (η) = 2α1(i) exp[− η / α(i)] = L(0,α(i)) .
227
|
Таблица 3.1 |
Оптимальные функции потерь и их производные |
|
|
|
Плотность |
Функция потерь F(ε) Производная функции |
распределения f(η) |
потерь F′(ε) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
−η2 / 2ση2 |
|
|
|
|
|
|
|
|
||||
N (0,ση) = |
2 |
e |
|
|
ε2 / 2ση2 + ln 2πση2 |
|
ε/ ση2 |
|
2πση |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
− |
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
s |
|
|
|
|
|
|
||
L(0, s) = |
|
e |
|
|
ε |
|
/ s + ln 2s |
1/ s sign ε |
||
|
|
|
|
|||||||
2s |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c(0,s) = |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
2ε/(s2 + ε2 ) |
|||
|
πs |
|
|
η 2 |
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
+ |
|
|
|
ln(s |
2 |
|
2 |
|
π |
|||
|
|
|
|
|
|
s |
|
|
+ ε |
|
) + ln |
|
|
||||
|
|
|
|
|
|
s |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для функции потерь получаем: |
|
|
|
|
|||||||||||||
|
F * (ε) = |
|
ε |
|
/ α(i) + ln 2α(I) , |
|
′ |
|
|
||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
F * (ε) = sign ε / α(i) . (3.4.51) |
|||||||||||||
228

В данном случае получили модульную функцию потерь. Использование метода наименьших квадратов дает худшие асимптотические свойства оценок.
3. Дробная плотность распределения помех (плотность распределения Коши) при условии взаимной некоррелированности измерений
f (η) = |
1 |
|
1 |
|
|
= C(0,α(i)) . |
|
|
|
|
|
||
|
1+ (η/ α(i)) |
2 |
||||
|
πα(i) |
|
|
|
||
В этом случае имеем:
F * (ε) = ln(α(i)2 + ε2 ) + ln π / α(i) ,
′ |
2 |
+ ε |
2 |
) . |
(3.4.52) |
F * (ε) = 2ε / (α(i) |
|
|
Эти и некоторые другие виды функций потерь и их производные приведены в табл.3.1 [13].
3.4.6. Асимптотическая матрица ковариаций ошибок оценки при оптимальной функции потерь
Найдем, чему равна асимптотическая матрица ковариаций при
оптимально выбранной функции потерь, т.е. |
|
F * (ε) = −ln f (η) η=ε . |
(3.4.53) |
Подставив выражение (3.4.53) для оптимальной функции потерь в формулу для АМКО (3.4.40), получим:
|
|
|
|
|
∞ |
|
′2 |
(η)dη |
|
|
|
|
|||
|
|
|
|
|
∫ |
|
|
|
|
|
|||||
|
|
|
|
|
f (η)F * |
|
A−1 |
(c ,ση2 )= |
|||||||
V(F*, f ) = |
−∞ |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
||||||||
|
|
|
|
|
∞ |
′ |
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (η)F * (η)dη |
|
|
|
|
|||||
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
′ |
2 |
dη |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
∫ f (η)[(−ln f (η)) ] |
|
|
(c ,ση2 )= |
||||||||||
= |
−∞ |
|
|
|
|
|
|
|
|
A−1 |
|||||
|
|
|
|
|
|
|
|
2 |
|||||||
|
|
∞ |
f ′(η)(−ln f (η))′d |
|
|
|
|
|
|
||||||
|
|
∫ |
|
|
|
|
|
|
|
||||||
|
|
|
η |
|
|
|
|
|
|
||||||
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
229
|
∞ |
′ |
2 |
|
|
|
|
∫ f (η)[ f |
dη |
|
|||
|
(η) / f (η)] |
|
(c ,ση2 ). |
|||
= |
−∞ |
|
|
|
A−1 |
|
∞ |
|
|
|
|||
∫ f ′(η)[− f ′(η) / f (η)]dη
−∞
Приводя подобные члены, окончательно получаем:
V(F*, f ) = V( f ) = |
A−1 |
(c ,ση2 ) |
. |
(3.4.54) |
∞ |
|
|||
|
|
|
|
|
|
∫ [ f ′(η)]2 / f (η)dη |
|
|
|
−∞
Выражение, стоящее в знаменателе (3.4.54), называется информацией Фишера и обозначается IF ( f (η)) , т.е.:
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IF ( f (η)) = ∫ [ f ′(η)]2 / f (η)dη. |
|
(3.4.55) |
|||||||||||||
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Очевидно, справедливо следующее неравенство: |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
V(F, f ) ≥ V(F*, f ) , |
|
|
|
|
(3.4.56а) |
|||||||
|
где |
F(η) – любая функция потерь, |
F * (η) = −ln f (η) . Или, рас- |
|||||||||||||||||
|
крывая V(F, f ) и V(F*, f ) , получим: |
|
|
|
|
|
|
|
|
|||||||||||
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− ∫ F′2 (η) f (η)dη |
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||
|
−∞ |
|
|
|
A−1 (c ,ση2 )≥ |
|
|
|
|
|
A−1 (c,ση2 ).(3.4.56б) |
|||||||||
|
∞ |
|
|
2 |
∞ |
2 |
|
|
|
|
|
|
||||||||
′ |
|
|
|
|
|
∫ f ′ |
(η) / f (η)dη |
|
|
|||||||||||
|
′ |
|
|
|
|
|
|
|
|
|
||||||||||
∫ F (η) f (η)dη |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Важно отметить, что, если нормированная асимптотическая мат- |
|||||||||||||||||||
|
рица не зависит от параметра c и дисперсии шума ση2 |
(линейный |
||||||||||||||||||
|
регрессионный объект), то неравенство (3.4.56б) можно упростить: |
|||||||||||||||||||
|
|
|
|
|
|
|
∞ |
F′2 (η) f (η)dη |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
∫ |
|
|
|
|
1 |
|
|
|
|
||||
|
|
|
|
|
|
−∞ |
|
|
|
|
≥ |
|
|
|
|
. |
(3.4.57) |
|||
|
|
|
|
|
|
|
∞ |
|
|
|
∞ |
f |
′2 |
(η) |
dη |
|||||
|
|
|
|
|
|
|
∫ |
F′(η) f ′(η)dη |
∫ |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
−∞ |
|
f (η) |
|
|
|||||
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|||
|
Таким образом, |
знание плотности распределения помехи f (η) |
||||||||||||||||||
|
позволяет определить оптимальную функцию потерь. |
При этом |
||||||||||||||||||
230