|
ˆ |
|
|
1 |
2 −1 |
|
|
|
|
|
|
var{bLS (N ) −b} = |
|
σηDu |
. |
(3.3.30) |
N |
Последнее выражение показывает, что чем больше «разброс» входных параметров, тем точнее оценку мы можем получить. С другой стороны, чем больше дисперсия шума измерений, тем менее точную оценку мы получаем.
Пример. Рассмотрим идентификацию параметров линейного регрессионного объекта с тремя входами и одним выходом:
y(i) = b0 +b1u1 (i) +b2u2 (i) + b3u3 (i) + η(i) .
Для моделирования данного объекта были приняты следующие
истинные значения параметров: |
|
b0 = 3.0; b1 = –4.0; |
b2 = –5.0; b3 = –6.0. |
Входные воздействия u1(i) , |
u2 (i) , u3 (i) , а также шум η(i) мо- |
делировались с помощью генератора нормально распределенных псевдослучайных чисел.
Для идентификации параметров b0 , b1 , b2 , b3 и исследования
влияния дисперсии входных потоков и дисперсии шума на точность оценки было проведено 10 групп измерений по 50 измерений в каждой группе. В качестве характеристики точности оценивания использовалось вычисляемое средне квадратичное отклонение оценки от истинного значения параметра:
10 |
|
(b |
ˆ |
2 |
+ (b |
ˆ |
2 |
|
ˆ |
2 |
+ (b |
ˆ |
2 |
|
/10 , |
S = |
|
− b |
) |
− b |
) + (b |
|
− b |
|
) |
− b |
) |
|
∑ |
|
0 |
0 j |
|
1 |
1 j |
|
2 |
|
2 j |
|
3 |
3 j |
|
|
|
j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которое представляет собой приближение следа ковариационной матрицы ошибки оценки, т.е.
|
|
|
ˆ |
|
ˆ |
т |
S . |
|
|
tr M (b − bLS )(b − bLS ) |
|
|
|
|
|
|
|
|
|
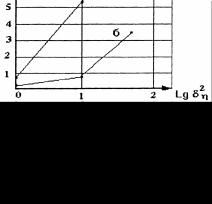
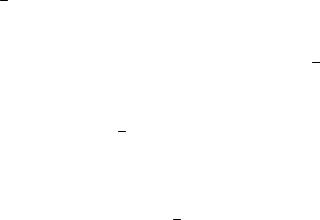
На рис. 3.3 приведены зависимости параметра точности S от дисперсий входных потоков при различных значениях дисперсии шума измерений. Полученные графические зависимости полностью согласуются с теоретическими выводами (3.3.30), а именно:
увеличение дисперсии входных потоков приводит к увеличению точности оценивания;
увеличение дисперсии шума измерений приводит к уменьшению точности оценивания.
Рис. 3.3. Зависимость точности оценки от дисперсии входных потоков и дисперсии шума измерений: а) δu = 50; б) δu = 1
Проверка адекватности модели и объекта по критерию Фишера [5] показала, что во всех расчетных случаях, кроме σu2 =1, ση2 = 50 , наблюдается адекватность модели объекту.
3.3.3. Рекуррентная форма метода наименьших квадратов для линейных регрессионных объектов
При решении практических инженерных задач оценивания на управляющих цифровых вычислительных машинах необходимо решение задач оценивания в реальном масштабе времени, что требует сокращения времени вычислений и объема обрабатываемой информации. Это может быть достигнуто как за счет совершенствования вычислительной техники, так и за счет модернизации алгоритмов оценивания в смысле уменьшения объема вычислений. Особенно трудоемкими операциями при использовании явных методов идентификации являются операции перемножения и обращения матриц большой размерности.
Учитывая это, можно заключить, что разработка методов оценивания, позволяющих снизить объем запоминаемой информации и уменьшить время вычислений, является актуальной задачей.
Во многих случаях, когда составляющие вектора измерений поступают последовательно с течением времени, возможно находить
192

оценку сˆ(i +1) на (i +1) -м шаге измерительного процесса в виде
коррекции оценки сˆ(i) |
на i -м шаге. Эта коррекция представляет |
собой взвешенную |
невязку между векторами выходов объекта |
′ |
′ |
′ |
y (i +1) |
ˆ |
и модели ψ (U (i +1)c (i)) , полученными на интервале вре- |
мени [ti ;ti+1] . Такие алгоритмы последовательной обработки дан-
ных называются рекуррентными (последовательными) алгоритмами и имеют вид:
|
ˆ |
ˆ |
|
′ |
|
|
′ ′ |
ˆ |
|
|
|
|
|
с(i +1) = c (i) + K (i +1)( y (i +1) − ψ (U (i +1),c (i))) , |
′ |
– вектор поступивших на интервале [ti ;ti+1) измерений |
y (i +1) |
выхода размерности p ; U |
′ |
(i +1) |
– матрица входов, размерности |
|
p ×m . Такой процесс получения последовательно уточняемых
оценок называется рекуррентным оцениванием.
В том случае, когда вся измерительная информация распадается на взаимно некоррелированные группы ( p измерений в группе),
для линейного регрессионного объекта вида
′ |
′ |
|
′ |
(3.3.31) |
|
y (i +1) |
=U (i +1)b + η (i +1) , |
можно сформировать рекуррентный алгоритм оценивания [4], при этом основные рекуррентные формулы для оценки параметров имеют вид:
ˆ |
ˆ |
′ |
′ |
ˆ |
|
bLS (i +1) |
= bLS (i) + K(i +1)( y (i +1) |
−U (i +1)bLS (i)) . (3.3.32) |
|
|
′ |
|
(3.3.33) |
|
P(i +1) = P(i) − K (i +1)U |
(i +1)P(i) . |
Коэффициент усиления K (i +1) |
может быть рассчитан по формуле |
K(i +1) = P(i)U′т (i +1)(R′−1 (i +1) +U ′(i +1)P(i)U ′т (i +1))−1 . (3.3.34)
Часто в приложениях используется другая формула расчета коэффициента усиления K (i +1) :
′ |
′ |
(i +1) , |
(3.3.35а) |
K (i +1) = P(i +1)U (i +1)R |
′ |
|
|
p × p . |
где R (i +1) – диагональная матрица весов размерности |
Для инициализации рекуррентного процесса необходимо задать
начальные приближения ˆ и . Можно предложить два bLS (0) P(0)
способа задания начальных приближений:
первый способ заключается в использовании выборок U (0) , y(0) достаточного объема и последующем расчете начальных приближений по формулам [4]:
ˆ |
= (U (0)) |
−1 |
y(0) , |
P(0) = (U |
т |
(0)R(0)U (0)) |
−1 |
; (3.3.35б) |
bLS (0) |
|
|
|
второй способ используется, если никаких предварительных выборок не производится. В этом случае можно предложить сле-
|
|
|
ˆ |
дующее правило: чем хуже начальные приближения bLS (0) , тем |
больше должна быть матрица P(0) . Можно показать, что матрица |
P(0) отражает матрицу ошибки оценки. Поэтому, чем хуже на- |
чальное |
ˆ |
|
дисперсия ошибки |
приближение bLS (0) , тем больше |
оценки, |
и тем больше должна быть матрица P(0) . Вообще, матри- |
цу P(0) можно задать в виде: |
|
|
|
P(0) = λI , |
(3.3.36) |
где λ – большое число, при этом |
ˆ |
– любой вектор, размерно- |
bLS (0) |
сти m.
Запишем полученные рекуррентные соотношения при одном измерении в группе для РАР-объекта, модель которого может быть представлена в виде:
|
|
|
|
|
~ |
т |
~ |
|
|
|
~ |
|
y(i) = z |
|
(i)c , |
|
где |
z(i) , |
определяются формулами (3.1.15), (3.1.16). В этом слу- |
|
c |
|
чае |
оценка |
ˆ |
, матрица |
усиления K (i +1) и матрица |
|
cLS (i +1) |
P(i +1) рассчитываются по формулам:
+ K (i +1)(y(i) − z |
т |
ˆ |
|
(i)cLS (i)) , (3.3.37) |
(i) |
|
|
1 |
, |
(3.3.38а) |
|
1 |
|
|
|
+ z т (i)P(i)z(i) |
|
|
|
|
|
|
|
|
|
|
|
|
r(i) |
|
|
|
или
K (i +1) = r(i)(P(i +1)z(i)) , |
(3.3.38б) |

P(i +1) = P(i) − |
|
|
|
|
1 |
P(i)z(i)z т(i)P(i) . (3.3.39) |
|
1 |
|
т |
|
|
|
+ z |
|
|
|
|
|
|
|
|
|
(i)P(i)z(i) |
|
|
r(i) |
|
|
|
|
При равноточных измерениях не имеет смысла использовать
|
|
|
|
|
|
|
|
|
различные r(i) , |
i =1, 2, ... . |
Тогда, |
введя обозначение |
H (i) = r P(i) , можно переписать |
формулы |
(3.3.38а), |
(3.3.38б), |
(3.3.39) в виде: |
|
|
1 |
|
|
|
K (i +1) = H (i)z(i) |
|
|
|
(3.3.40а) |
(1 + z т (i)H (i)z(i)) |
|
или |
K (i +1) = H (i +1)z(i) , |
|
|
(3.3.40б) |
|
|
|
|
H (i +1) = H (i) − |
|
1 |
|
|
H (i)z(i)z т(i)H (i) . |
(3.3.41) |
|
|
|
|
(1 |
+ z т(i)H (i)z(i)) |
|
|
|
|
|
ˆ |
H (0) определяются так же, как |
Начальные приближения c(0) , |
было рассмотрено выше.
Пример. Как показывает опыт использования рекуррентных соотношений (3.3.37) – (3.3.39), большое влияние на точность оценки и на скорость сходимости алгоритма оказывают начальные при-
ˆ |
(0) |
и матрицы P(0) . |
ближения оценки c |
Для исследования влияния этих факторов проводилась идентификация параметров линейного регрессионного объекта вида:
y(i) = b0 + b1U1(i) + b2U2 (i) +b3U3 (i) + η(i) .
При моделировании использовались следующие параметры объекта
b0 = 1.0; b1 = 2.0; b2 = 3.0; b3 = 4.0.
Входные потоки U j (i) ; i =1,50 ; j =1,3 , а также шум измерений η(i) моделировались с помощью генератора нормально распределенных случайных чисел с параметрами распределений:
M{U } =1,0 ; |
σ2 |
=10,0 ; |
1 |
U |
|
|
|
1 |
|
M{U |
} = 2,0 ; |
σ2 |
=10,0 ; |
2 |
|
U2 |
|
M{U |
} = 3, |
0 |
; |
σ2 |
|
=10,0 ; |
3 |
|
|
|
U3 |
|
M{η} = 0, |
0 |
; |
ση2 |
=10,0 . |
В качестве оценки точности определения параметров исследуемого объекта использовалась сглаженная по 10 реализациям ошибка
|
1 |
10 |
3 |
ˆ |
2 |
|
1/2 |
|
|
|
∑ ∑ |
|
|
|
|
(i) = |
|
(bj (i −l) −bj ) |
|
. |
|
|
10 |
|
|
|
|
i=0 j=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
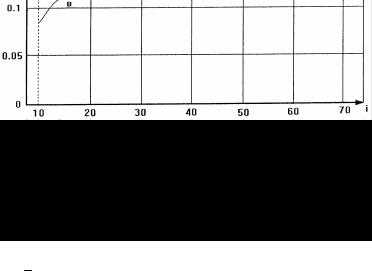
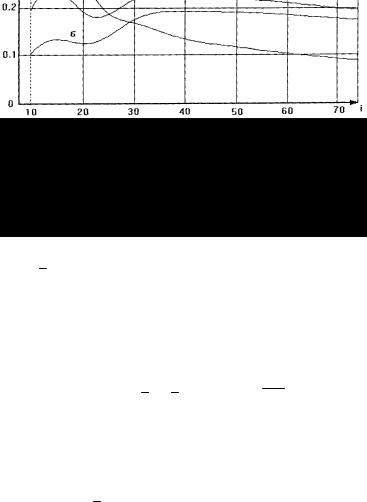
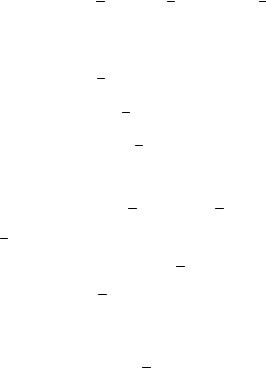
На рис.3.2а и 3.2б приведены зависимости |
|
|
(i) от номера изме- |
рений для различных начальных приближений H (0) при началь- |
ных значениях оценки |
ˆ |
|
близких к истинным значениям пара- |
c(0) |
метров (см. рис.3.4а) и плохих начальных приближениях |
ˆ |
(см. |
c(0) |
рис.3.4б). Приведенные графические зависимости полностью согласуются с теоретическими выводами.
Рис. 3.4а. График зависимости сглаженной ошибки оценки от номера измерений при b (0) = [1,2; 2,0; 3,1; 3,9] и начальных приближениях матрицы Н(0):
а) Н[0] = 1хI; б) Н[0] = 10хI; в) Н[0] =100хI
Рис.3.4б. График зависимости сглаженной ошибки оценки от номера измерений при b (0) = [0; 0; 0; 0] и начальных приближениях матрицы Н[0]:
а) Н[0] = 10хI; б) Н[0] = 1000хI; в) Н[0] = 10000хI
3.3.4. Метод наименьших квадратов для нелинейных объектов
Рассмотрим нелинейный статический объект y(i) = Ψ(u (i),c) + η(i) , i =1, N .
Соответствующая ему модель представлена в виде
~ |
|
~ |
|
|
(3.3.42) |
|
|
|
|
y(i) = Ψ(u (i),c ) , i =1, N . |
Оптимизируемый критерий соответствует методу наименьших квадратов:
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
~ |
|
2 |
|
|
= ∑[ y(i) − Ψ(u (i),c )] |
r(i) : |
|
|
|
i=1 |
|
|
|
|
~ |
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
= arg |
~min J (c ) . |
|
(3.3.43) |
|
cLS |
|
|
|
|
c |
|
|
Задача минимизации критерия (3.3.43) при нелинейной функции (3.3.42) может быть решена каким-либо методом нелинейного программирования. Эти методы достаточно хорошо разработаны и описаны в соответствующей литературе.
197
В настоящем пособии приведен метод оптимизации, предназначенный для нахождения экстремума функции вида (3.3.43). Получаемая в результате итерационная последовательность соответствует методу Ньютона – Гаусса [14].
Пусть на j -м шаге итерационного процесса имеется некоторая
оценка параметра ˆ , достаточно близкая к истинному значению c( j)
параметра. Для каждого i -го момента времени ( i [i, N ] ) разложим функцию Ψ(u (i),cˆ( j)) в ряд Тейлора относительно оценки
ˆ до второго члена малости: c( j)
|
|
|
~ |
( j)) + |
∂Ψ(u (i),c ) |
|
∂c~т |
~ − ˆ
(c c( j)) .(3.3.44)
~=ˆ
c c ( j)
Подставим последнее выражение в формулу критерия (3.3.43):
~ =
J (c )
N |
|
|
|
|
|
|
ˆ |
|
= ∑ |
|
( j)) − |
y(i) − Ψ(u(i),c |
i=1 |
|
|
|
|
|
|
|
|
|
Введем обозначения:
~~ ˆ
β( j) = с −с( j) ,
|
|
|
ˆ |
т |
|
|
|
|
|
|
∂Ψ(u(i),c ) |
|
|
|
|
∂c |
|
|
ˆ |
|
|
|
|
|
c |
=c |
y(1) e( j) =
y(N)
|
|
|
|
|
2 |
|
|
|
|
|
|
ˆ |
|
|
r(i) . (3.3.45) |
(c |
−c |
( j)) |
( j) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
− Ψ(u (1), c( j)) |
|
|
|
... |
|
|
|
, |
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
− Ψ(u (N ), c( j)) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
~ |
|
|
|
|
∂Ψ(u (1),c ) |
... |
∂Ψ(u (1),c ) |
|
|
~ |
|
|
|
~ |
|
|
|
|
|
∂c1 |
~ ... |
|
∂cm |
~ |
|
. (3.3.46) |
Φ( j) = |
... |
... |
|
|
∂Ψ( |
u |
(N),c ) |
... |
∂Ψ( |
u |
(N),c ) |
|
|
~ |
|
|
|
~ |
|
|
|
|
|
∂c1 |
|
|
|
|
|
∂cm |
|
c~= |
~ |
( j) |
|
|
|
|
|
|
|
|
c |
|
С учетом введенных обозначений, функция (3.3.45) принимает вид:
~ |
~ |
|
т |
|
~ |
|
|
( j)) |
R(e( j) −Φ( j)β( j)) . (3.3.47) |
J (c ) = (e( j) −Φ( j)β |
|

Последнее выражение, с точностью до обозначений, имеет тот
же вид, что и критерий (3.3.10). Минимизация критерия (3.3.47) по
~
β( j) приводит к итерационной последовательности:
cˆ( j +1) = cˆ( j) + (Φт ( j)RΦ( j))−1 Φт ( j)R( y − Ψ(cˆ( j))) . (3.3.48)
Необходимо отметить, что данный метод очень чувствителен к
ˆ |
(0) . |
выбору начального приближения c |
Это объясняется тем, что в основе метода лежит линеаризация
|
|
~ |
относительно оценки |
ˆ |
на j-м шаге итера- |
|
функции Ψ(u (i),c ) |
c( j) |
ционного процесса.
Признаком окончания итерационного процесса (3.3.48) может служить выполнение условия:
|
ˆ |
ˆ |
|
|
|
|
|
|
|
J (c( j +1)) |
− J (c( j)) |
|
≤ δ , |
(3.3.49) |
|
|
|
|
|
ˆ |
+1)) |
|
|
J (c( j |
|
|
|
где δ – заданное малое число.
В заключение данного раздела сравним рекуррентную формулу (3.3.37) и итерационную (3.3.48). Несмотря на то, что эти формулы имеют схожий вид, они отражают два совершенно различных подхода к идентификации.
Рекуррентная формула (3.3.37) построена по принципу коррекции оценки на основе новых наблюдений.
Итерационная формула (3.3.48) обеспечивает движение к минимуму функции (3.3.43) по направлению антиградиента в точке
ˆ , при этом никаких новых наблюдений не поступает. c( j)
3.3.5.Линейные несмещенные оценки
сминимальной дисперсией ошибки оценки
(марковские оценки)
В случае, когда известна ковариационная матрица ошибки измерений Dη = var(η) , то рационально в качестве матрицы весов R в
методе наименьших квадратов использовать обратную ковариационную матрицу ошибок измерений, т.е.
R = Dη−1 .
Тогда критерий, соответствующий методу наименьших квадратов, для нахождения оценок линейного регрессионного объекта будет иметь вид:
|
|
|
|
|
|
т |
D |
−1 |
|
|
|
|
|
(3.3.50) |
J (b ) = ( y − y(b )) |
|
|
|
( y − y(b )) . |
|
|
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
Подставляя R = D−1 |
в формулу оценки (3.3.13) и ошибки оцен- |
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ки (3.3.23) для линейного регрессионного объекта, получим |
ˆ |
|
= (U |
т |
|
−1 |
|
|
−1 |
U |
т |
−1 |
y |
; |
(3.3.51) |
bMV |
|
Dη U ) |
|
|
|
|
Dη |
|
|
|
ˆ |
|
|
|
|
(U |
|
т |
|
|
−1 |
−1 |
. |
(3.3.52) |
|
|
|
|
|
|
|
|
var(bMV −b ) = |
|
|
Dη |
U ) |
|
|
|
|
|
ˆ |
|
|
является оценкой минимальной дис- |
Покажем, что оценка bMV |
|
персии в классе линейных оценок (теорема Маркова – Гаусса), т.е. покажем, что
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−b ) , |
|
|
|
|
var(bL −b ) ≥ var(bMV |
|
|
|
ˆ |
– любая линейная несмещенная оценка. |
|
|
где bL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запишем дисперсию оценки bL : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
} = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
var(bL −b ) = M{(Qy |
−b )(Qy −b ) |
|
= M{(QUb |
|
+ Qη− |
|
)(QUb |
|
+ Qη− |
|
)т} . |
|
|
b |
|
b |
Учитывая, что для несмещенных оценок QU = I , получаем |
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
т |
, |
|
|
|
|
(3.3.53) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
var(bL −b ) = QDηQ |
|
|
|
|
|
где Dη — ковариационная матрица помехи. Рассмотрим два матричных выражения:
A = D−1/2U |
и Bт = QD1/2 |
, |
η |
η |
|
где |
|
|
Dη = Dη1/2 (Dη1/2 )т . |
(3.3.54) |
Воспользуемся неравенством Шварца [14] для матриц. Согласно этому неравенству:
QDη1/2 (Dη1/2 )т Qт = QDηQт ≥