

Михеев Исполнителные устройства автоматических 2008
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
МОСКОВСКИЙ ИНЖЕНЕРНО-ФИЗИЧЕСКИЙ ИНСТИТУТ (ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ)
В. П. Михеев, В. И. Выжимов
Исполнительные устройства автоматических систем
Учебное пособие
Рекомендовано УМО «Ядерные физика и технологии» в качестве учебного пособия
для студентов высших учебных заведений
Москва 2008
УДК 681.5(075) ББК 32.965я7 М69
Михеев В. П., Выжимов В. И. Исполнительные устройства автоматических систем: Учебное пособие. - М.:МИФИ, 2008.-332с.
Рассматриваются исполнительные устройства, широко используемые в системах автоматического управления: электромагнитные механизмы, электромашинные и тиристорные усилители, электрические и гидропневмодвигатели. Анализируются их статические характеристики как преобразователей энергии. Рассматриваются методы управления выходными параметрами. Учебное пособие предназначено для студентов, специализирующихся по электронике и автоматике физических установок, поддерживает курс «Теоретические основы специальности: элементная база автоматических систем», читаемый на кафедре Автоматики МИФИ
Учебное пособие подготовлено в рамках Инновационной образовательной программы.
Рецензент доц., канд. техн. наук Нечаев Н.Н.
Печать пособия выполнена в соответствии с оригиналом – макетом, представленным автором.
ISBN 978-5-7262-0940-1
©Московский инженерно-физический институт (государственный университет), 2008
ОГЛАВЛЕНИЕ
Предисловие ………………………………………………… .………7
1.Преобразователи сигналов в автоматических системах…...…….8
1.1.Структура систем автоматического управления……….…….8
1.2.Классификация преобразователей…………………………. .10
1.3.Статические характеристики преобразователей……………12
1.3.1. Регулировочная характеристика……………...………14
1.3.2. Внешняя характеристика………………………………17
1.3.3. Характеристики нагрузки и статическая устойчивость……………………….………….....…… 20
1.4.Преобразователи дискретного действия…………………….24
2.Электромагнитные устройства …………...……………………...31
2.1.Нереверсивные ЭММ постоянного тока………………...…..31
2.1.1.Принцип действия. Структурная схема ЭММ………..31
2.1.2.Статические характеристики ЭММ…………………...33
2.2.ЭММ переменного тока………………………………………39
2.2.1.Статические характеристики ЭММ
переменного тока ……………………………….…......39 2.2.2. Конструктивные особенности ЭММ переменного
тока……………………………………………………...43
2.3.Реверсивные электромагнитные механизмы…...…………...46
2.3.1.Принцип действия реверсивных ЭММ………………..46
2.3.2.Статические характеристики реверсивных ЭММ…….48
2.4.Временные характеристики ЭММ…………………………...52
2.4.1.Переходные процессы в ЭММ при срабатывании…..52
2.4.2.Переходные процессы в ЭММ при отпускании……..55
2.4.3.Изменение временных характеристик ЭММ………...57
2.5.Области применения и конструкции электромагнитных устройств………………………………………………………61
2.5.1.Силовые электромагниты……………………………...61
2.5.2.Электромагнитные реле……………………………….65
2.5.3.Контакторы……………………………………………..74
2.5.4.Контакты коммутирующей аппаратуры……………...75
3.Электромашинные усилители………………………...…………..86
3.1.Генераторы независимого возбуждения….....…………..….87
3.1.1.Конструкция и принцип действия ГНВ…..……..…...87
3.1.2.Реакция якоря …………………………………… ….93
3.1.3.Статические характеристики ГНВ………...…………96
3
3.2.Электромашинные усилители поперечного поля……..… 100
3.2.1.Принцип действия…………………………………....101
3.2.2.Статические характеристики ЭМУ………………....104
4.Тиристорные усилители…………………………………………111
4.1.Принцип действия тиристорного усилителя (ТУ)……......111
4.1.1.Принцип работы тиристора………………….............111
4.1.2.Согласование тиристора с нагрузкой…………….....116
4.1.3.Структурная схема ТУ……………………………….121
4.1.4.Классификация схем ТУ……………………...……...122
4.2.Тиристорные блоки с выходом на переменном токе……..125
4.2.1.Статические характеристики ТБ при активной нагрузке………………………………………………..125
4.2.2.Статические характеристики ТБ при
индуктивной нагрузке………………………….......…126
4.2.3. Статические характеристики ТБ при
cмешанной (R-L) нагрузке……………………………129
4.2.4.Реверсивные ТБ переменного тока………………….133
4.3.Тиристорные блоки с выходом на выпрямленном токе….136
4.3.1.Статические характеристики однотактной схемы
ТБ при различных видах нагрузки.............................. |
136 |
4.3.2. Статические характеристики двухтактной схемы |
|
ТБ при различных видах нагрузки…………… …..144 |
|
4.3.3.Улучшение статических характеристик Б………..153
4.3.4.Реверсивные ТБ постоянного тока………………....161
4.4.Схемы управления тиристорными блоками…………...….163
4.4.1.Блоки управления тиристорными ключами………..164
4.4.2.Блоки управления тиристорных усилителей… ….167
5.Исполнительные электрические двигатели…………………….173
5.1.Классификация электрических двигателей………………..173
5.2.Исполнительные двигатели постоянного тока (ИДПТ)…..176
5.2.1.Конструкция и принцип действия…………………...176
5.2.2.Структурная схема…………………...……………….178
5.2.3.Способы управления ИДПТ………………………….180
5.2.4.Тормозные и пусковые режимы ИДПТ ...…………..195
5.2.5.Импульсное управление ИДПТ……………………...206
5.2.6.Динамические характеристики ИДПТ………………218
5.2.7.Конструктивные разновидности ИДПТ……………..220
5.2.8.Универсальные коллекторные двигатели …………..226
4
5.3.Асинхронные двигатели………………………………….…230
5.3.1.Принцип действия асинхронного двигателя…… ..…230
5.3.2.Структурная схема АСД .………………………...…..232
5.3.3.Схема замещения асинхронного двигателя …...…....236
5.3.4.Механические характеристики АСД……………...…239
5.3.5.Методы управления АСД при круговом поле……....241
5.3.6.Методы управления АСД при эллиптическом
поле………………………………………………..…..245
5.3.7.Тормозные и пусковые режимы АСД…………….....255
5.3.8.Конструктивные разновидности АСД……………....258
5.4.Синхронные двигатели…………………………………...…260
5.4.1.Синхронные двигатели с активным ротором…...….260
5.4.2.Реактивные синхронные двигатели………………....262
5.4.3.Синхронные гистерезисные двигатели…………..…268
5.4.4.Шаговые двигатели………………………………..…272
6.Гидропневмодвигатели………………………………………….282
6.1.Общие положения и структурные схемы гидропневмомашин………………………………………....282
6.2.Основные соотношения в гидравлических цепях………...285
6.3.Принцип действия и конструкции гидропневмомашин….288
6.3.1.Определения и классификация…………………..….288
6.3.2.Гидропневмомашины с линейным перемещением...289
6.3.3.Шестеренчатые гидромашины…………………..…..292
6.3.4.Поршневые гидромашины вращательного действия радиального типа…………………………..294
6.3.5.Поршневые гидромашины вращательного действия аксиального типа.……………………….....296
6.4.Статические характеристики гидропневмомашин………...299
6.4.1.Статические характеристики управляемых насосов.299
6.4.2.Статические характеристики гидропневмодвигате-
лей…………………….........................................……304
6.5.Гидравлические и пневматические управляющие
устройства……………………………………………..… .….308
6.5.1.Золотниковые управляющие устройства…………....309
6.5.2.Статические характеристики золотниковых
устройств…………………...………………………….313
6.5.3. Управляющее устройство типа «сопло-заслонка»….319
5
6.5.4. Статические характеристики устройства типа
«сопло-заслонка»…………………………………..…322 6.5.5. Управляющее устройство типа "струйная трубка"....325
Список литературы…………………………………………………330
6
Предисловие
За прошедшие годы техника, а с ней и элементная база автоматических систем, проделала огромный путь от ламповых и релейных схем до современных микропроцессорных систем. Однако основы курса, заложенные Виноградовым Д. К., не утратили своей актуальности и по сей день. Дело в том, что он акцентировал внимание на принципиальных основах работы тех или иных устройств, которые являются наименее изменяемой частью технических систем.
Авторы данного учебного пособия в разное время студентами прослушали курс лекций Виноградова Д. К. и с благодарностью вспоминают о нем.
Главы 2, 3, 4 и 5 написаны доцентом Михеевым В. П., а главы 1 и 6 – совместно с доцентом Выжимовым В. И.
7
1. ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ В АВТОМАТИЧЕСКИХ СИСТЕМАХ
Любая система автоматического управления (САУ) представляет собой совокупность элементов и узлов, между которыми существует энергетические и информационные связи. Разделение связей на энергетические и информационные весьма условно, так как носителем информации является сигнал, который обладает определенной энергией. Таким образом, элементы, входящие в САУ, являются преобразователями энергии. Работа преобразователя в системе определяется его характеристиками: статическими и динамическими. Динамические характеристики изучаются в теории автоматического управления (ТАУ). В настоящем пособии при изучении элементов автоматических систем мы ограничимся статическими характеристиками, которые также во многом определяют свойства системы.
1.1. Структура систем автоматического управления
Рассмотрим в качестве объекта управления (ОУ) термостат, в котором надо регулировать температуру. Если в качестве регулирующего органа (РО) в термостате используется нагревательный элемент, представляющий собой постоянное активное сопротивление, то, изменяя с помощью усилителя мощности прикладываемое к этому сопротивлению напряжение или протекающий по нему ток, можно изменять величину электрической мощности, переходящей в тепло и, следовательно, изменять температуру в термостате. Регулирование осуществляется изменением потока энергии, подводимой к объекту.
Выходная величина объекта управления в самом общем случае представляет собой поток энергии или вещества, и управление, регулирование выходной величины сводится по существу к изменению этого потока. Для того, чтобы управление было возможно, ОУ должен содержать устройство, способное изменять его выходную величину. Такое устройство называется
регулирующим органом.
Для контроля текущего значения регулируемой величины объект должен быть снабжен чувствительным элементом (ЧЭ),
8
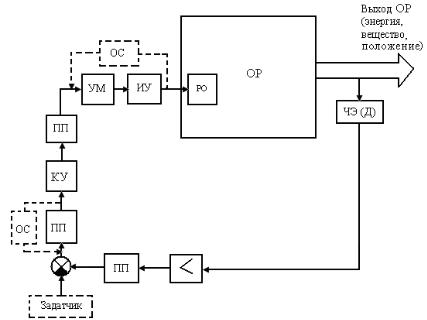
(датчиком Д). Назначение датчика – измерить величину регулируемого параметра и преобразовать его в сигнал, удобный для дальнейшей передачи и обработки; таким сигналом, как правило, является электрический сигнал.
Из принципа действия системы следует, что в системе обязателен элемент сравнения (ЭС), вырабатывающий сигнал, пропорциональный разности текущего и заданного значений регулируемой величины.
Для изменения состояния РО служит исполнительное устройство (ИУ). В качестве ИУ может быть использован или
усилитель мощности, или исполнительный двигатель. Заметим,
что для управления двигателем может потребоваться усилитель мощности. Поясним сказанное примером.
Рис. 1.1
Кроме перечисленных выше элементов – регулирующего органа, элемента сравнения, исполнительного устройства, усилителя мощности – в систему могут входить и другие элементы:
9
промежуточные преобразователи (ПП) и усилители, источники питания, устройства сигнализации и защиты, корректирующие устройства (КУ), обеспечивающие необходимый вид статических и динамических характеристик, и т. д. Исходя из этого, структурную схему САУ можно представить в виде, показанном на рис. 1.1.
Структура САУ, показанная на рис. 1.1, представляет собой замкнутую систему, систему с обратной связью.
Понятие обратной связи (ОС) является едва ли не определяющим в САУ. Под обратной связью понимается воздействие выходной величины на вход. Воздействие выхода управляемой системы (сигнал с датчика) на вход управляющей (через элемент сравнения) обеспечивает возможность работы САУ и называется главной обратной связью. Кроме главной ОС в системе могут применяться местные ОС, охватывающие группы и даже отдельные элементы с целью улучшения их характеристик.
Перечисленные элементы САУ, названные по их назначению в системе, можно считать классификацией преобразователей по их
месту в системе.
1.2. Классификация преобразователей
Кроме классификации по функциональному признаку, по месту и назначению в системе, рассмотренной выше, преобразователи могут быть классифицированы по ряду других признаков. Назовем основные энергетические признаки: вид энергии, лежащей в основе работы преобразователя; однородность энергии входного и выходного сигналов; наличие источника вспомогательной энергии; обратимость. Можно провести также классификацию по виду статических и динамических характеристик; по виду сигналов на входе и выходе преобразователя.
Передача информации не может осуществляться без передачи энергии, причем ни количество информации, ни ее сущность не зависят от вида энергии.
Если энергия входного и выходного сигналов имеет одну физическую природу, то такой преобразователь называют однородным, если физическая природа различна – неоднородным. Например, трансформатор – однородный (электрический) преобразователь, а электродвигатель – неоднородный (электро-
10