

Решение
Передаточную функцию Ke(p) преобразуем к виду
 .
(18.2)
.
(18.2)
Отсюда находим передаточную функцию разомкнутой системы
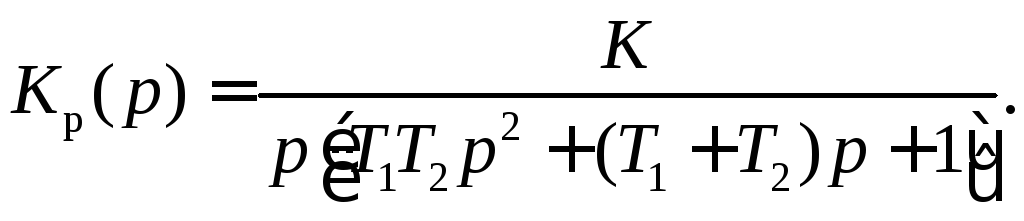 (18.3)
(18.3)
Рассматриваемая система имеет первый порядок астатизма и добротность K1=K=100 с–1. Следовательно, установившаяся динамическая ошибка в первом случае равна

а во втором случае

Для нахождения коэффициента С2/2 используем уравнение (11.8) (лекция 11), которое в данном случае принимает вид
 (18.4)
(18.4)
где A(p)=T1T2p2+(T1+T2)p+1, а B(p)=1.
Приравнивая коэффициенты при p2 в обеих частях уравнения, находим
![]()
или
![]() .
.
Подставив значения параметров K, Т1 и Т2, получим С2/2=0,001.
Окончательно для ошибки имеем
![]()
Первая
составляющая (0,019) определяет скоростную
ошибку, а вторая (–0,01t)
– ошибку по ускорению. Как видим, вклад
составляющей – С2/2=–0,001
действительно мал, и можно полагать,
что
![]() .
.
Пример 19
Провести
оптимизацию системы (рис. 19.1) по параметру
kи
при воздействии
![]() и помехе
и помехе![]() – белом шуме с спектральной плотностьюN0
Bт
/Гц.
– белом шуме с спектральной плотностьюN0
Bт
/Гц.
Решение
Оптимизацию проводим в соответствии с критерием (1.106), так как воздействие детерминированное.
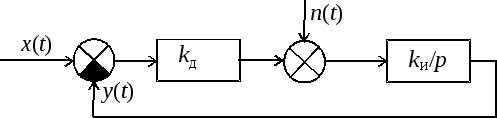
Рис. 19.1
Используя результаты п.п. 1.5.2, 1.5.3, для среднего квадрата ошибки (1.94) запишем
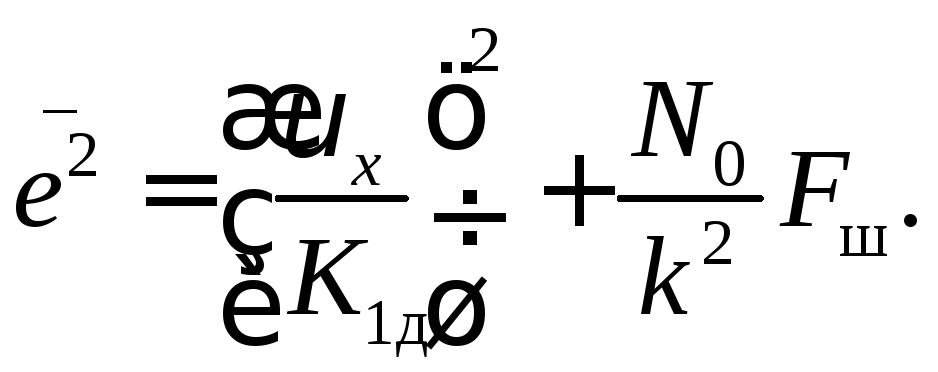 (19.1)
(19.1)
Шумовая полоса системы в соответствии с (1.98) равна
![]()
где
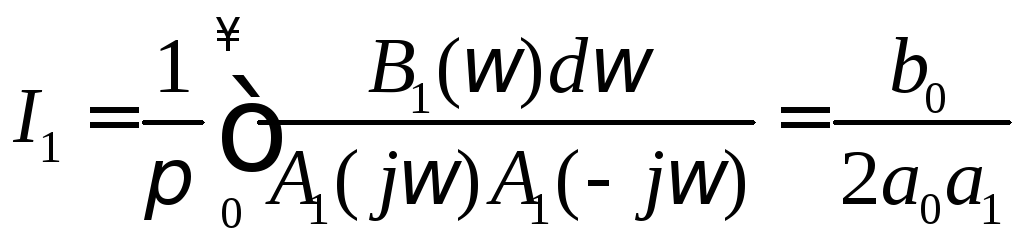 (19.2)
(19.2)
– табличный интеграл вида (1.100), а полиномы
соответствуют передаточной функции замкнутой системы Kз(p)=1/[1+p(1/K1)].
Подставив значения параметров a0=1/K1, a1=1 и b0=1 в (19.2), находим I1=K1/2.
Шумовая полоса определяется добротностью системы по скорости K1=kдkи:
![]() (19.3)
(19.3)
Критерий оптимизации (1.106) в данном случае принимает вид
 (19.4)
(19.4)
Решая уравнение (19.4), получаем
Оптимальное
значение шумовой полосы и минимально
достижимую ошибку находим подстановкой
![]() в выражение дляFш
(19.3) и
в выражение дляFш
(19.3) и
![]() ,
(19.1):
,
(19.1):
 (19.5)
(19.5)

Анализ
выражения (19.5) показывает, что оптимальное
значение полосы системы определяется
скоростью изменения воздействия
![]() и интенсивностью шумаN0
(уменьшается с ростом N0).
и интенсивностью шумаN0
(уменьшается с ростом N0).
Пример 20
Для системы, рассмотренной в примере 19, провести оптимизацию по параметру kи при условия, что воздействие х(t) – стационарный случайный процесс с нулевым средним значением и спектральной плотностью
Sx()=
![]()
(помеха n(t), как и ранее, белый шум со спектральной плотностью N0).
Решение
В качестве критерия оптимальности используем выражение (1.107), которое принимает вид
 (20.1)
(20.1)
Дисперсию динамической ошибки находим из (12.10) (лекция 12) после подстановки в него выражений для энергетического спектра воздействия и квадрата АЧХ
Используя для Sx() представление в виде
Sx()
=
дисперсию динамической ошибки выражаем через табличный интеграл:
![]()
 (20.2)
(20.2)
где полиномы
A2(j)=(j)2+(+K1)(j)+K1,
B2()=2.
После подстановки параметров a0=1, a1=+K1, a2=K1, b0=1 и b1=0 в выражение (20.2), получаем

Дисперсия динамической ошибки

С учетом этого выражения после решения уравнения (20.1) относительно параметра kи опт имеем
 (20.3)
(20.3)
Значения
оптимальной шумовой полосы и минимально
достижимой ошибки находим подстановкой
k
иопт
в соответствующие выражения для Fш
опт
и
![]() .
Как видно из (20.3), значениеkиопт
(а следовательно,
Fшопт)
определяется дисперсией
.
Как видно из (20.3), значениеkиопт
(а следовательно,
Fшопт)
определяется дисперсией
![]() и шириной спектра
воздействия, а также интенсивностью
шума N0.
и шириной спектра
воздействия, а также интенсивностью
шума N0.